Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Quantum Threat Timeline - Full ReportDocumento43 pagineQuantum Threat Timeline - Full ReportDimas Cabré i ChacónNessuna valutazione finora
- Characteristics of Counter Example Loops in The Collatz ConjectureDocumento38 pagineCharacteristics of Counter Example Loops in The Collatz ConjectureDimas Cabré i ChacónNessuna valutazione finora
- Mechanical Vibration WorksheetDocumento6 pagineMechanical Vibration Worksheetduraiprakash83Nessuna valutazione finora
- Individual Choice Sequences in The Work of L.E.J. Brouwer: Joop NiekusDocumento16 pagineIndividual Choice Sequences in The Work of L.E.J. Brouwer: Joop NiekusDimas Cabré i ChacónNessuna valutazione finora
- 2209 08451Documento13 pagine2209 08451Dimas Cabré i ChacónNessuna valutazione finora
- Deep learning course summary and key lessonsDocumento100 pagineDeep learning course summary and key lessonsHunny Gupta100% (3)
- Precise Measurement of Quantum Observables With Neural-Network EstimatorsDocumento9 paginePrecise Measurement of Quantum Observables With Neural-Network EstimatorsDimas Cabré i ChacónNessuna valutazione finora
- Quantum simulation framework Qibo with hardware accelerationDocumento15 pagineQuantum simulation framework Qibo with hardware accelerationDimas Cabré i ChacónNessuna valutazione finora
- Lecture Notes in Artificial Intelligence 1778Documento410 pagineLecture Notes in Artificial Intelligence 1778anirbanbhowmick88Nessuna valutazione finora
- Fastai. A Layered API For Deep LearningDocumento26 pagineFastai. A Layered API For Deep LearningDimas Cabré i ChacónNessuna valutazione finora
- Quantum Threat Timeline - Executive SummaryDocumento4 pagineQuantum Threat Timeline - Executive SummaryDimas Cabré i ChacónNessuna valutazione finora
- Category Theory and Set Theory As Theori PDFDocumento18 pagineCategory Theory and Set Theory As Theori PDFDimas Cabré i ChacónNessuna valutazione finora
- Quantum-inspired classical algorithm for recommendation systemsDocumento32 pagineQuantum-inspired classical algorithm for recommendation systemsDimas Cabré i ChacónNessuna valutazione finora
- Supervised Learning PDFDocumento112 pagineSupervised Learning PDFBILAL ALAMNessuna valutazione finora
- Quantum Computing in the NISQ EraDocumento20 pagineQuantum Computing in the NISQ EraDimas Cabré i ChacónNessuna valutazione finora
- Foundations of A General Theory of Functions of A Variable Complex MagnitudeDocumento38 pagineFoundations of A General Theory of Functions of A Variable Complex MagnitudeDimas Cabré i ChacónNessuna valutazione finora
- Computability. Turing, Gödel, Church, and Beyond - 99.00Documento5 pagineComputability. Turing, Gödel, Church, and Beyond - 99.00Dimas Cabré i ChacónNessuna valutazione finora
- Computability. Turing, Gödel, Church, and Beyond - 00 - 02Documento3 pagineComputability. Turing, Gödel, Church, and Beyond - 00 - 02Dimas Cabré i ChacónNessuna valutazione finora
- Quantum Chemistry in The Age of Quantum Computing PDFDocumento194 pagineQuantum Chemistry in The Age of Quantum Computing PDFDimas Cabré i ChacónNessuna valutazione finora
- Supervised Learning PDFDocumento112 pagineSupervised Learning PDFBILAL ALAMNessuna valutazione finora
- Computability. Turing, Gödel, Church, and Beyond - 00 - 01Documento5 pagineComputability. Turing, Gödel, Church, and Beyond - 00 - 01Dimas Cabré i ChacónNessuna valutazione finora
- Computability. Turing, Gödel, Church, and Beyond - 00 - 03Documento5 pagineComputability. Turing, Gödel, Church, and Beyond - 00 - 03Dimas Cabré i ChacónNessuna valutazione finora
- Ntttechnical 2019.12Documento51 pagineNtttechnical 2019.12Dimas Cabré i ChacónNessuna valutazione finora
- Ashual Specifying Object Attributes and Relations in Interactive Scene Generation ICCV 2019 PaperDocumento9 pagineAshual Specifying Object Attributes and Relations in Interactive Scene Generation ICCV 2019 PaperDimas Cabré i ChacónNessuna valutazione finora
- Aaai11 AnalogyDocumento7 pagineAaai11 AnalogyDimas Cabré i ChacónNessuna valutazione finora
- Computability. Turing, Gödel, Church, and Beyond - 00 - 00Documento2 pagineComputability. Turing, Gödel, Church, and Beyond - 00 - 00Dimas Cabré i ChacónNessuna valutazione finora
- Deep learning course summary and key lessonsDocumento100 pagineDeep learning course summary and key lessonsHunny Gupta100% (3)
- Eisenstein NLP NotesDocumento587 pagineEisenstein NLP NotesaklfkasdfjNessuna valutazione finora
- A Proof of The ABC Conjecture After Mochizuki PDFDocumento405 pagineA Proof of The ABC Conjecture After Mochizuki PDFDimas Cabré i ChacónNessuna valutazione finora
- Ai in Life Sciences and Healthcare CmsDocumento32 pagineAi in Life Sciences and Healthcare CmsDimas Cabré i ChacónNessuna valutazione finora
- (Studies in Computational Intelligence) Witold Pedrycz, Shyi-Ming Chen - Deep Learning - Algorithms and Applications-Springer (2020)Documento368 pagine(Studies in Computational Intelligence) Witold Pedrycz, Shyi-Ming Chen - Deep Learning - Algorithms and Applications-Springer (2020)Dimas Cabré i Chacón100% (2)
- GMC in World War Two PDFDocumento51 pagineGMC in World War Two PDFanon_835518017Nessuna valutazione finora
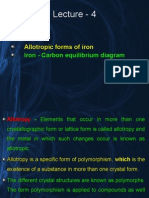
- FMP 221 Lecture 4Documento22 pagineFMP 221 Lecture 4SarojKumarSinghNessuna valutazione finora
- HISTOGRAMADocumento8 pagineHISTOGRAMAGABRIELA ESTEFANIA SIGUENZA LOJANessuna valutazione finora
- Dyno Nobel Blast Design and DigiShot Detonators Produce Excellent Results PDFDocumento1 paginaDyno Nobel Blast Design and DigiShot Detonators Produce Excellent Results PDFGabriel KibindaNessuna valutazione finora
- Concept of Operations DRAFT v1Documento84 pagineConcept of Operations DRAFT v1Ramesh dodamaniNessuna valutazione finora
- Alkali Boil OutDocumento5 pagineAlkali Boil OutprithwichandraNessuna valutazione finora
- AC 120-Yy - Aircraft Wiring System Training ProgramDocumento40 pagineAC 120-Yy - Aircraft Wiring System Training Programmimmo42Nessuna valutazione finora
- Proposal For A Cloud Computing Solution and Application in A Pedagogical Virtual OrganizationDocumento10 pagineProposal For A Cloud Computing Solution and Application in A Pedagogical Virtual OrganizationloneislandNessuna valutazione finora
- With Valves Supplied by Siemens: Building TechnologiesDocumento45 pagineWith Valves Supplied by Siemens: Building TechnologiesHamid AbdNessuna valutazione finora
- Work Experience: Kamble Arti Navnath MOB: (+91) 8830600972Documento3 pagineWork Experience: Kamble Arti Navnath MOB: (+91) 8830600972KambleNessuna valutazione finora
- 250 42aECDocumento35 pagine250 42aECniknenadNessuna valutazione finora
- Aim-9 SidewinderDocumento20 pagineAim-9 SidewinderNazrin Nadzri100% (1)
- Materials Required Per Unit WorkDocumento18 pagineMaterials Required Per Unit WorkLiban Halake100% (2)
- Teac Ad-600 PDFDocumento50 pagineTeac Ad-600 PDFAnonymous Pr8IgKeNessuna valutazione finora
- Icctpea14 RTL SDRDocumento17 pagineIcctpea14 RTL SDRYgb RedaNessuna valutazione finora
- Simulate Variable Speed Motor Control - MATLAB & Simulink PDFDocumento9 pagineSimulate Variable Speed Motor Control - MATLAB & Simulink PDFLanAnhThịNguyễnNessuna valutazione finora
- 2012 - Long Distance Pipe Jacking - ExperienceDocumento40 pagine2012 - Long Distance Pipe Jacking - ExperienceCheng KimHuaNessuna valutazione finora
- Stiffness Modifiers As Per IS 1893 (Part 1) - 2016Documento6 pagineStiffness Modifiers As Per IS 1893 (Part 1) - 2016Kamal Rao100% (1)
- ZAPOSH CONSULTANCY MAKES WORKPLACES SAFERDocumento40 pagineZAPOSH CONSULTANCY MAKES WORKPLACES SAFERJohn Paul Marin ManzanoNessuna valutazione finora
- Pbat 10 eDocumento16 paginePbat 10 eapi-290101261Nessuna valutazione finora
- Calculation Loose Gravel PDFDocumento114 pagineCalculation Loose Gravel PDFEE PH KHAMMAMNessuna valutazione finora
- Hotel Housekeeping Chapter 1 IntroductionDocumento20 pagineHotel Housekeeping Chapter 1 IntroductionĐoàn ThiệnNessuna valutazione finora
- Datasheet SSA-X300 170629Documento1 paginaDatasheet SSA-X300 170629aparichithudooNessuna valutazione finora
- 1900 Series Multi-Stage Split Case Pumps Technical DataDocumento8 pagine1900 Series Multi-Stage Split Case Pumps Technical DataKenneth CastroNessuna valutazione finora
- 160 88-CL2Documento6 pagine160 88-CL2vanthe140591Nessuna valutazione finora
- Blackrock Methods of Delay AnalysisDocumento36 pagineBlackrock Methods of Delay AnalysisAhmed MoubarkNessuna valutazione finora
- PDMS Support Design UsingDocumento83 paginePDMS Support Design UsingTien LeNessuna valutazione finora
- Ultrasonic Welding PDFDocumento43 pagineUltrasonic Welding PDFsanmiteNessuna valutazione finora
- Company ProfileDocumento39 pagineCompany Profilemud33bNessuna valutazione finora