Potrebbero piacerti anche
- 2.2 Ecuacion de Equilibrio Dinamico para Sistemas de 1 GDLDocumento20 pagine2.2 Ecuacion de Equilibrio Dinamico para Sistemas de 1 GDLRonaldo Jacinto ENessuna valutazione finora
- Capitulo 8Documento63 pagineCapitulo 8noelNessuna valutazione finora
- LicuacionDocumento6 pagineLicuacionEdgar SoteloNessuna valutazione finora
- Ensayo CBRDocumento19 pagineEnsayo CBRRay Gonzalo Figueroa GibajaNessuna valutazione finora
- Sistemas de un grado de libertadDocumento40 pagineSistemas de un grado de libertadItaloo LoliNessuna valutazione finora
- C5 Vibracion LibreDocumento14 pagineC5 Vibracion LibreCesar Turrin LleellishNessuna valutazione finora
- ANTISISMICADocumento43 pagineANTISISMICAJhonn Cañari HuayllaNessuna valutazione finora
- 4.1 Diseno SismorresistenteDocumento14 pagine4.1 Diseno SismorresistenteRonaldo Jacinto ENessuna valutazione finora
- Análisis EstructuralDocumento3 pagineAnálisis EstructuralIvan Esteban GarciaNessuna valutazione finora
- Antisismica Dinamica Estructural Ing SalinasDocumento33 pagineAntisismica Dinamica Estructural Ing SalinasAnderson J. LezcanoNessuna valutazione finora
- Ingenieria Sismorresistente 2021 - Semana 2Documento56 pagineIngenieria Sismorresistente 2021 - Semana 2Italoo LoliNessuna valutazione finora
- Disipadores Sismicos en Edificaciones en Colombia PDFDocumento10 pagineDisipadores Sismicos en Edificaciones en Colombia PDFNata Re NataNessuna valutazione finora
- Analisis Sismico Estatico de Edificaciones Aporticados Norma NECDocumento124 pagineAnalisis Sismico Estatico de Edificaciones Aporticados Norma NECMiguel TisalemaNessuna valutazione finora
- C3 Libre 19 2 PDFDocumento33 pagineC3 Libre 19 2 PDFyessicaNessuna valutazione finora
- Tarea 2 Grupo3 Final CommentedDocumento17 pagineTarea 2 Grupo3 Final CommentedAngel IslaNessuna valutazione finora
- INGENIERÍA SISMORRESISTENTE InformeDocumento36 pagineINGENIERÍA SISMORRESISTENTE InformeGonzalo Vega VigoNessuna valutazione finora
- Concreto Armado Semana 11, 12 PDFDocumento99 pagineConcreto Armado Semana 11, 12 PDFCristhian Bonifacio RomeroNessuna valutazione finora
- PracticaAula 2 2018-1Documento5 paginePracticaAula 2 2018-1Klenner CamayoNessuna valutazione finora
- Metodos Kani Taka y Otros PDFDocumento44 pagineMetodos Kani Taka y Otros PDFYessenia ElisaNessuna valutazione finora
- SDOF Vibración Libre y AmortiguadaDocumento31 pagineSDOF Vibración Libre y AmortiguadaJuanjoMacíasNessuna valutazione finora
- Pre dimensionamiento de elementos estructurales de hospitalDocumento10 paginePre dimensionamiento de elementos estructurales de hospitalluisNessuna valutazione finora
- Ecuaciones de MovimientoDocumento25 pagineEcuaciones de MovimientogarciaNessuna valutazione finora
- Dinámica de Sistemas de 1 GDLDocumento16 pagineDinámica de Sistemas de 1 GDLjonypres19Nessuna valutazione finora
- ANTISISMICADocumento22 pagineANTISISMICAHiroshi Alejandro Colonia Murata100% (1)
- Informe SismicaDocumento29 pagineInforme SismicaJosé Félix Valverde Llajaruna100% (1)
- Esfuerzos en SuelosDocumento4 pagineEsfuerzos en SuelosRoberto Alfaro AlejoNessuna valutazione finora
- Dinamica EstructuralDocumento23 pagineDinamica EstructuralShabell ChoiNessuna valutazione finora
- Ingenieria AntisismicaDocumento4 pagineIngenieria AntisismicaJoel A. RosalesNessuna valutazione finora
- Periodos de Vibración de Las EdificacionesDocumento15 paginePeriodos de Vibración de Las EdificacionesIgnacio GutiérrezNessuna valutazione finora
- Introducción Estructuras de ContenciónDocumento24 pagineIntroducción Estructuras de ContenciónAdri Fernandez CastellsNessuna valutazione finora
- Modos de Vibración de EstructurasDocumento20 pagineModos de Vibración de EstructurasAngel Sullcaray IchpasNessuna valutazione finora
- Comportamiento Dinámico de Estructuras De1 GDLDocumento42 pagineComportamiento Dinámico de Estructuras De1 GDLALEXANDER ATENCIO POLONessuna valutazione finora
- Análisis Los Sistemas y Grados de Libertad y Ecuación de Equilibrio DinámicoDocumento31 pagineAnálisis Los Sistemas y Grados de Libertad y Ecuación de Equilibrio DinámicoErik David Medina100% (1)
- 1 Generación de SismosDocumento5 pagine1 Generación de SismosYerson Claudio RiveraNessuna valutazione finora
- Segundo Trabajo Analisis SismicoDocumento12 pagineSegundo Trabajo Analisis SismicoHideki Oswaldo Checcnes ArpiNessuna valutazione finora
- Solucion de La EDM - Sismo, Carga DinámicaDocumento20 pagineSolucion de La EDM - Sismo, Carga Dinámicacarlos100% (1)
- Analisis Sísmico EstatícoDocumento20 pagineAnalisis Sísmico EstatícoGuillermo Vasquez BardalesNessuna valutazione finora
- MecánicaSuelosAplicadaDocumento4 pagineMecánicaSuelosAplicadaJonathanChávezNessuna valutazione finora
- Propiedades Estructurales de Los Sistemas MúltiplesDocumento12 paginePropiedades Estructurales de Los Sistemas MúltiplesJose Ivan CarrilloNessuna valutazione finora
- Pauta Examen Ingeniería AntisísmicaDocumento14 paginePauta Examen Ingeniería AntisísmicaMatías Cortés CamusNessuna valutazione finora
- Introduccion A La SismologíaDocumento25 pagineIntroduccion A La SismologíaKeila Castillo Cango100% (1)
- Determinación de la matriz de amortiguamiento por Rayleigh y CaugheyDocumento2 pagineDeterminación de la matriz de amortiguamiento por Rayleigh y CaugheySandro VasquezNessuna valutazione finora
- Grupo N°08Documento25 pagineGrupo N°08Jhosselyn Geraldine Briceño MarchenaNessuna valutazione finora
- Espectros de Respuesta y de DiseñoDocumento22 pagineEspectros de Respuesta y de DiseñoDaniel CristanchoNessuna valutazione finora
- Analisisis Acti ListoDocumento22 pagineAnalisisis Acti Listofranklin espinozaNessuna valutazione finora
- Word - 30hojasDocumento31 pagineWord - 30hojasAnaa09100% (1)
- Dinamica EstructuralDocumento37 pagineDinamica EstructuralCARLOS ALEJANDRO CABALLA OLIVARESNessuna valutazione finora
- CapÝtulo 6Documento15 pagineCapÝtulo 6Yajaira Carbonel CalleNessuna valutazione finora
- Análisis Pseudo TridimensionalDocumento21 pagineAnálisis Pseudo TridimensionalLEONCIOCARRASCONessuna valutazione finora
- Sismica 02Documento54 pagineSismica 02Oscar Choque JaqquehuaNessuna valutazione finora
- Dinamica Estructural PDFDocumento44 pagineDinamica Estructural PDFasesoriaac_chrisNessuna valutazione finora
- Examen de Ingeniería Antisísmica CalleDocumento3 pagineExamen de Ingeniería Antisísmica CalleRaulinho CalleNessuna valutazione finora
- Pendulo Invertido FCP REV1Documento16 paginePendulo Invertido FCP REV1Alessandra TacoNessuna valutazione finora
- Estruc DinamDocumento80 pagineEstruc DinamJorge Eduardo GuillénNessuna valutazione finora
- Unidad I. Int. Dinámica de Estructuras. Dinámica de Estructuras Dinámica de EstructurasDocumento5 pagineUnidad I. Int. Dinámica de Estructuras. Dinámica de Estructuras Dinámica de EstructurasMartin SeoaneNessuna valutazione finora
- Vibración Libre No AmortiguadaDocumento20 pagineVibración Libre No Amortiguadaisai martinez ruiz0% (1)
- Metodología de proyecto sismorresistente de edificiosDa EverandMetodología de proyecto sismorresistente de edificiosValutazione: 5 su 5 stelle5/5 (1)
- Ejercicios sobre elasticidad y resistencia de materialesDa EverandEjercicios sobre elasticidad y resistencia de materialesNessuna valutazione finora
- Medición de ActividadesDocumento1 paginaMedición de ActividadesJhonn Cañari HuayllaNessuna valutazione finora
- Defensa NacionalDocumento12 pagineDefensa NacionalJhonn Cañari HuayllaNessuna valutazione finora
- Sesion #02 Albañileria EstructuralDocumento36 pagineSesion #02 Albañileria EstructuralJonathan De La Torre VargasNessuna valutazione finora
- Un Archivo CualquieraDocumento1 paginaUn Archivo CualquieraJhonn Cañari HuayllaNessuna valutazione finora
- Monografia de Defensa NacionalDocumento14 pagineMonografia de Defensa NacionalJhonn Cañari HuayllaNessuna valutazione finora
- Defensa Nacional TrabajoDocumento40 pagineDefensa Nacional TrabajoJhonn Cañari HuayllaNessuna valutazione finora
- Lo Que SeaDocumento1 paginaLo Que SeaJhonn Cañari HuayllaNessuna valutazione finora
- Lo Que SeaDocumento1 paginaLo Que SeaJhonn Cañari HuayllaNessuna valutazione finora
- Lo Que SeaDocumento1 paginaLo Que SeaJhonn Cañari HuayllaNessuna valutazione finora
- Proyectos sociales: etapas y elementos para su elaboraciónDocumento9 pagineProyectos sociales: etapas y elementos para su elaboraciónJhonn Cañari HuayllaNessuna valutazione finora
- Lo Que SeaDocumento1 paginaLo Que SeaJhonn Cañari HuayllaNessuna valutazione finora
- Lo Que SeaDocumento1 paginaLo Que SeaJhonn Cañari HuayllaNessuna valutazione finora
- Hidraulica IIDocumento516 pagineHidraulica IIGrman Bojaca100% (1)
- Resistencia de MaterialesDocumento74 pagineResistencia de MaterialesJhonn Cañari HuayllaNessuna valutazione finora
- ANTISISMICADocumento43 pagineANTISISMICAJhonn Cañari HuayllaNessuna valutazione finora
- ANTISISMICADocumento43 pagineANTISISMICAJhonn Cañari HuayllaNessuna valutazione finora
- CaminosDocumento22 pagineCaminosJhonn Cañari HuayllaNessuna valutazione finora
- Construcciones en Albañileria Angel San BartolomeDocumento246 pagineConstrucciones en Albañileria Angel San BartolomeJose Luis Gonzales Diaz100% (2)
- Mejoramiento vial rural 6.28 kmDocumento13 pagineMejoramiento vial rural 6.28 kmJhonn Cañari HuayllaNessuna valutazione finora
- MEMORIA DESCRIP BARRIO Sencca ChectuyoqDocumento41 pagineMEMORIA DESCRIP BARRIO Sencca ChectuyoqJhonn Cañari HuayllaNessuna valutazione finora
- Ensayo Corte DirectoDocumento33 pagineEnsayo Corte Directoadpncnaj0% (1)
- Descripcion Tecnica Del Proyecto PomacanchiDocumento9 pagineDescripcion Tecnica Del Proyecto PomacanchiJhonn Cañari HuayllaNessuna valutazione finora
- Trab A-MacroeconomiaDocumento14 pagineTrab A-MacroeconomiaJhonn Cañari Huaylla0% (1)
- IndumentariaProteccionDocumento8 pagineIndumentariaProteccionJhonn Cañari HuayllaNessuna valutazione finora
- Seccion de Celda-Model PDFDocumento1 paginaSeccion de Celda-Model PDFJhonn Cañari HuayllaNessuna valutazione finora
- Enfermedades ZonoticasDocumento43 pagineEnfermedades ZonoticasJhonn Cañari HuayllaNessuna valutazione finora
- TDR de AlmuerzoDocumento5 pagineTDR de AlmuerzoJhonn Cañari HuayllaNessuna valutazione finora
- Trab A-MacroeconomiaDocumento14 pagineTrab A-MacroeconomiaJhonn Cañari Huaylla0% (1)
- LeishmaniasisDocumento60 pagineLeishmaniasisJhonn Cañari HuayllaNessuna valutazione finora
- 0 Solucionario Sotelos Cap 3 Cap 4 EscanDocumento64 pagine0 Solucionario Sotelos Cap 3 Cap 4 EscanAriel LoayzaNessuna valutazione finora
- Hidraulica AplicaDocumento17 pagineHidraulica AplicaCARMEN LINDA SUAREZNessuna valutazione finora
- Aerosoles IntroduccionDocumento21 pagineAerosoles Introduccionscribed123scribedNessuna valutazione finora
- Solucionario de Problemas de Circuitos Electricos PDFDocumento14 pagineSolucionario de Problemas de Circuitos Electricos PDFGiuseppeNapolitanoNessuna valutazione finora
- S03 - CinéticaDocumento30 pagineS03 - CinéticaJose Manuel Antezana GomezNessuna valutazione finora
- Empuje Dinamico de FluidosDocumento26 pagineEmpuje Dinamico de FluidoscchatrumaNessuna valutazione finora
- Ceim 01Documento47 pagineCeim 01Juan Carlos Aguilar CutiriNessuna valutazione finora
- Evaluación Distancia 2.1Documento3 pagineEvaluación Distancia 2.1Andersson Andrew Rincon MolinaNessuna valutazione finora
- Movimiento Circular UniformeDocumento19 pagineMovimiento Circular UniformeEdgar MatailoNessuna valutazione finora
- 02.03-5 Ejerciciso Practico Desarenador-1Documento3 pagine02.03-5 Ejerciciso Practico Desarenador-1Willian Lovon CondeNessuna valutazione finora
- Laboratorio 5 de Física 1 UTPDocumento6 pagineLaboratorio 5 de Física 1 UTPCristofer Del CidNessuna valutazione finora
- Mecanica Teorica en Ejercicios y Problemas I Mesherski PDFDocumento563 pagineMecanica Teorica en Ejercicios y Problemas I Mesherski PDFjose alberto padilla80% (5)
- Aplicación de Conceptos Básicos de La Física en La OdontologíaDocumento4 pagineAplicación de Conceptos Básicos de La Física en La OdontologíaAndres Felipe Perez100% (2)
- Momento de Inercia Laboratorio FísicaDocumento4 pagineMomento de Inercia Laboratorio FísicaFosterNessuna valutazione finora
- Coeficiente de Rozamiento Estático AutomotrizDocumento4 pagineCoeficiente de Rozamiento Estático AutomotrizBrayan Damian Jimenez HidalgoNessuna valutazione finora
- Eolica Basico AaeDocumento100 pagineEolica Basico AaeAnaApcarianNessuna valutazione finora
- Protocolo de Prueba Hidraulica Agua Potable - Collonce 2016Documento58 pagineProtocolo de Prueba Hidraulica Agua Potable - Collonce 2016Alex MacedoNessuna valutazione finora
- Dinamica 1 ATWOODDocumento4 pagineDinamica 1 ATWOODAlex RojasNessuna valutazione finora
- Calculo AlimentadoresDocumento3 pagineCalculo Alimentadoresnikita_tabaresNessuna valutazione finora
- Propuesta de Proyecto IntegradorDocumento7 paginePropuesta de Proyecto Integradormiguel angel gonzalez gonzalezNessuna valutazione finora
- Ejercicios de Flujo en CanalesDocumento6 pagineEjercicios de Flujo en CanalesMarta Ramos100% (1)
- Física 1°Documento20 pagineFísica 1°ricardosnxzNessuna valutazione finora
- Examen de Dinámica 1Documento9 pagineExamen de Dinámica 1Criizs Hdz LNessuna valutazione finora
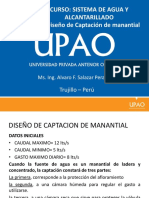
- Diseño de captación de manantial para caudal máximo de 12 lts/sDocumento18 pagineDiseño de captación de manantial para caudal máximo de 12 lts/sVictor Rodriguez UrquiagaNessuna valutazione finora
- New Solucionario Dinamica Hibbeler 12 EdicionDocumento4 pagineNew Solucionario Dinamica Hibbeler 12 EdicionJORGE ALEXANDER ECHEVERRIA50% (2)
- Móvil con aceleración constante (1.41i + 1.96j) m/s2Documento2 pagineMóvil con aceleración constante (1.41i + 1.96j) m/s2DENNISSE MONTAÑONessuna valutazione finora
- Linea de tiempo de la historia de la mecanica de fluidosDocumento9 pagineLinea de tiempo de la historia de la mecanica de fluidosAlejandra 1Nessuna valutazione finora
- M R U V - Separata-Rptas PDFDocumento7 pagineM R U V - Separata-Rptas PDFWilfredo Villanueva PuenteNessuna valutazione finora
- Dinámica lineal: leyes de Newton y problemas resueltosDocumento3 pagineDinámica lineal: leyes de Newton y problemas resueltosTeodoro YupaNessuna valutazione finora