Potrebbero piacerti anche
- Advanced Process Control: Beyond Single Loop ControlDa EverandAdvanced Process Control: Beyond Single Loop ControlNessuna valutazione finora
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsDa EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNessuna valutazione finora
- B1 - Liquid Level Control SystemDocumento17 pagineB1 - Liquid Level Control Systemmoon star angelNessuna valutazione finora
- CPE501 - Lab Simulink Control Loop Syste PDFDocumento27 pagineCPE501 - Lab Simulink Control Loop Syste PDFJose Heli Vallejos CoronadoNessuna valutazione finora
- CPB30004 Process Dynamics and Control Experiment 5: Heat Exchanger Process Control Lab ReportDocumento24 pagineCPB30004 Process Dynamics and Control Experiment 5: Heat Exchanger Process Control Lab ReportSiti Hajar Mohamed100% (1)
- Experiment 6 - Level Flow Trainer (Wlf922)Documento11 pagineExperiment 6 - Level Flow Trainer (Wlf922)Abdul AzimNessuna valutazione finora
- Lab Manual Gas Pressure Process ControlDocumento10 pagineLab Manual Gas Pressure Process ControlAziemah AulanNessuna valutazione finora
- Files 2-Experiments Homogenuous Batch ReactorDocumento6 pagineFiles 2-Experiments Homogenuous Batch ReactorS M AseemNessuna valutazione finora
- S-Lab Manual Exp 3 - Air Flow Process ControlDocumento12 pagineS-Lab Manual Exp 3 - Air Flow Process Controlarif arifinNessuna valutazione finora
- Lab Report - Distillation of Bubble CapDocumento21 pagineLab Report - Distillation of Bubble Capratish100% (1)
- Liquid Level Control SystemDocumento0 pagineLiquid Level Control SystemNajiRihaniNessuna valutazione finora
- Lab Report (Initial Boiling Point)Documento10 pagineLab Report (Initial Boiling Point)nisasoberiNessuna valutazione finora
- Process & Instrumental Control Lab ReportDocumento16 pagineProcess & Instrumental Control Lab ReportJosephine Wong Sian CheeNessuna valutazione finora
- Process Control & Instrumentations CEV 544 PrelabDocumento9 pagineProcess Control & Instrumentations CEV 544 PrelabFaradilah Binti Ajma'inNessuna valutazione finora
- The Effect of Pi and Pid Controllers On Flow Control SystemDocumento16 pagineThe Effect of Pi and Pid Controllers On Flow Control SystemahedooohNessuna valutazione finora
- Air Flow Pressure Temperature Control Training SystemDocumento2 pagineAir Flow Pressure Temperature Control Training SystemKamalanathen ChlvnNessuna valutazione finora
- Lab Report TPP Experiment 3Documento10 pagineLab Report TPP Experiment 3Nurul Najwa100% (1)
- CPB30004 Process Dynamics and Control Experiment 1: Level Flow Cascade Process Control Lab ReportDocumento8 pagineCPB30004 Process Dynamics and Control Experiment 1: Level Flow Cascade Process Control Lab ReportSiti Hajar Mohamed100% (5)
- Exp 4 Batch Evaporative Crystallization PDFDocumento9 pagineExp 4 Batch Evaporative Crystallization PDFmirza farhanNessuna valutazione finora
- Complete Lab Report 6Documento7 pagineComplete Lab Report 6Azuan SofianNessuna valutazione finora
- LAB LLE FULL REPORT ZkinDocumento26 pagineLAB LLE FULL REPORT ZkinAmir Al-AimanNessuna valutazione finora
- CHE 463 Heat Transfer Assignment 2: Group Member Id NumberDocumento6 pagineCHE 463 Heat Transfer Assignment 2: Group Member Id NumberFakrul HakimiNessuna valutazione finora
- Calibration of Peristaltic Pumps - Lab 1Documento12 pagineCalibration of Peristaltic Pumps - Lab 1mmccomas08100% (2)
- Experiment 1 - Process Control RigDocumento15 pagineExperiment 1 - Process Control Rigzimbabwe100Nessuna valutazione finora
- Pressure Control ReportDocumento16 paginePressure Control ReportAngel Mah Xin YeeNessuna valutazione finora
- Feed Forward and Cascade Control ExperimentDocumento28 pagineFeed Forward and Cascade Control Experimentjohnmayard100% (1)
- Lab 1Documento12 pagineLab 1JoeJeanNessuna valutazione finora
- Discussion Tray DryerDocumento3 pagineDiscussion Tray DryerIskandar ZulkarnainNessuna valutazione finora
- Lab Report Aspen Hysis UiTMDocumento12 pagineLab Report Aspen Hysis UiTMAhmad SiddiqNessuna valutazione finora
- Why Do We Need Process ControlDocumento6 pagineWhy Do We Need Process ControlSebastien PaulNessuna valutazione finora
- Level ControlDocumento6 pagineLevel ControlNadia RefaiNessuna valutazione finora
- Lab10 CompleteDocumento22 pagineLab10 CompleteMastura Ahmad Termizi100% (1)
- Exp - 2 Bubble Cap Distillation ColumnDocumento13 pagineExp - 2 Bubble Cap Distillation ColumnAdawiyah Al-jufri100% (1)
- Multivariable Control SystemDocumento21 pagineMultivariable Control SystemFforever'Yee ChengNessuna valutazione finora
- Exp 2 (Air Pressure Process Control)Documento16 pagineExp 2 (Air Pressure Process Control)shafiqah wong100% (1)
- Experiment: Batch Reactor Unit Operations Lab I (CHEGR3787L) Fall 2004Documento5 pagineExperiment: Batch Reactor Unit Operations Lab I (CHEGR3787L) Fall 2004Janice YanNessuna valutazione finora
- Level Flow ControlDocumento6 pagineLevel Flow Controlarpit gargNessuna valutazione finora
- Level ControlDocumento38 pagineLevel Controlcgjp120391Nessuna valutazione finora
- Apparatus, Procedure, Recommendation Tray DryerDocumento4 pagineApparatus, Procedure, Recommendation Tray DryerillyzlNessuna valutazione finora
- Lab Report CMT 450 Tray DryerDocumento3 pagineLab Report CMT 450 Tray DryerJohanNessuna valutazione finora
- Student 4 Mini Project (Reaction Engineering)Documento7 pagineStudent 4 Mini Project (Reaction Engineering)Muhammad KasyfiNessuna valutazione finora
- Conclusion and Recommendation Heat ExchangersDocumento2 pagineConclusion and Recommendation Heat ExchangersAzura Bahrudin0% (1)
- Control Lab ReportDocumento11 pagineControl Lab ReportMariamMunirAhmad100% (1)
- LC2-Level Control II - Lab ReportDocumento13 pagineLC2-Level Control II - Lab ReportKarishma GobinNessuna valutazione finora
- Air Flow Process ControlDocumento10 pagineAir Flow Process Controlfifie_natasha100% (1)
- Cascade Control SE665Documento20 pagineCascade Control SE665NurulFarihahMohdZulkefleNessuna valutazione finora
- Conclusion, Recoomendation, Reffenrence, Lab 2, CHE 485Documento2 pagineConclusion, Recoomendation, Reffenrence, Lab 2, CHE 485MOHD MU'IZZ BIN MOHD SHUKRINessuna valutazione finora
- COD ReportDocumento11 pagineCOD ReportKosin SomrakNessuna valutazione finora
- PH Process RigDocumento3 paginePH Process RigSyed Raza Ali100% (1)
- Expt. 4 - Pressure ControlDocumento16 pagineExpt. 4 - Pressure Controlpleco4meNessuna valutazione finora
- FM Exp 1.REDDWOOD VISCOMETERDocumento7 pagineFM Exp 1.REDDWOOD VISCOMETERL13 Krushna NemadeNessuna valutazione finora
- Level Flow PCDocumento10 pagineLevel Flow PCMurali TharanNessuna valutazione finora
- Full Report Exp Batch CPPDocumento18 pagineFull Report Exp Batch CPPAdiba HamidiNessuna valutazione finora
- CHE61403 - Safety in Process Plant Design: SolutionDocumento5 pagineCHE61403 - Safety in Process Plant Design: SolutionPorkkodi SugumaranNessuna valutazione finora
- Control of Temperature System 2Documento18 pagineControl of Temperature System 2mustafa Al AsfourNessuna valutazione finora
- PC Experiment - Pressure, Temperature, Flow and LevelDocumento15 paginePC Experiment - Pressure, Temperature, Flow and LevelnajihahNessuna valutazione finora
- PID Tuning Guide 022810Documento28 paginePID Tuning Guide 022810Darren AshNessuna valutazione finora
- Valve Diagnostics and Automatic 2017 IIDocumento5 pagineValve Diagnostics and Automatic 2017 IImanuel salazarNessuna valutazione finora
- ME - 415 - 3417 - Lab6 - Mohammed Tahhan - 392027113Documento8 pagineME - 415 - 3417 - Lab6 - Mohammed Tahhan - 392027113على طرق السفرNessuna valutazione finora
- Unitvi Control SystemsDocumento47 pagineUnitvi Control SystemsVishal SharmaNessuna valutazione finora
- Lab Report: Membrane Separation 1.0 AbstractDocumento1 paginaLab Report: Membrane Separation 1.0 AbstractnajihahNessuna valutazione finora
- Abstract & Conclusion The Acid Ionization Constant, KaDocumento3 pagineAbstract & Conclusion The Acid Ionization Constant, KanajihahNessuna valutazione finora
- Calculation Report 2Documento4 pagineCalculation Report 2najihahNessuna valutazione finora
- Xiangshui Chemical Factory's ExplosionDocumento21 pagineXiangshui Chemical Factory's ExplosionnajihahNessuna valutazione finora
- MY Template - Fake NewsDocumento4 pagineMY Template - Fake NewsnajihahNessuna valutazione finora
- Abstract For Exp 2Documento1 paginaAbstract For Exp 2najihahNessuna valutazione finora
- Lab 4 ObjDocumento1 paginaLab 4 ObjnajihahNessuna valutazione finora
- Co2 Concentration (M) Vs Time (Min)Documento2 pagineCo2 Concentration (M) Vs Time (Min)najihahNessuna valutazione finora
- Surprising Benefits of Bitter Melon For DiabetesDocumento41 pagineSurprising Benefits of Bitter Melon For DiabetesnajihahNessuna valutazione finora
- Lab Report (Distillation)Documento10 pagineLab Report (Distillation)najihahNessuna valutazione finora
- Level Process Control SystemDocumento10 pagineLevel Process Control SystemnajihahNessuna valutazione finora
- Lab Report (Distillation)Documento10 pagineLab Report (Distillation)najihahNessuna valutazione finora
- Heat CalculationDocumento4 pagineHeat CalculationnajihahNessuna valutazione finora
- PC Experiment - Pressure, Temperature, Flow and LevelDocumento15 paginePC Experiment - Pressure, Temperature, Flow and LevelnajihahNessuna valutazione finora
- Lab Report LLE LatestDocumento7 pagineLab Report LLE Latestnajihah50% (2)
- Abstract & Conclusion The Acid Ionization Constant, KaDocumento3 pagineAbstract & Conclusion The Acid Ionization Constant, KanajihahNessuna valutazione finora
- Lab Report SOAPS AND DETERGENTDocumento17 pagineLab Report SOAPS AND DETERGENTnajihahNessuna valutazione finora
- Intro, Theory & RefDocumento7 pagineIntro, Theory & RefnajihahNessuna valutazione finora
- Lab 4 ObjDocumento1 paginaLab 4 ObjnajihahNessuna valutazione finora
- Lab 5 - Results & CalculationDocumento2 pagineLab 5 - Results & CalculationnajihahNessuna valutazione finora
- Lab Report On Preparation of Soap and Properties Comparison With Synthetics DetergentDocumento1 paginaLab Report On Preparation of Soap and Properties Comparison With Synthetics DetergentnajihahNessuna valutazione finora
- Intro, Theory & RefDocumento7 pagineIntro, Theory & RefnajihahNessuna valutazione finora
- Conclusion & RecommendationDocumento2 pagineConclusion & RecommendationnajihahNessuna valutazione finora
- Equivalence PointDocumento2 pagineEquivalence PointnajihahNessuna valutazione finora
- For The Second Experiment, Part B, Molarity (Part B)Documento1 paginaFor The Second Experiment, Part B, Molarity (Part B)najihahNessuna valutazione finora
- For The Second Experiment, Part B, Molarity (Part B)Documento1 paginaFor The Second Experiment, Part B, Molarity (Part B)najihahNessuna valutazione finora
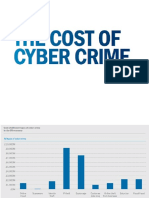
- Cyber CrimeDocumento4 pagineCyber CrimenajihahNessuna valutazione finora
- Abstract For Exp 2Documento1 paginaAbstract For Exp 2najihahNessuna valutazione finora
- Lab Report Reaction (Temperature)Documento8 pagineLab Report Reaction (Temperature)najihahNessuna valutazione finora
- Calculation Sheet: Design CodeDocumento1 paginaCalculation Sheet: Design CodeCak AndiNessuna valutazione finora
- News Letter 2014Documento12 pagineNews Letter 2014VINAYAKUMAR B AEINessuna valutazione finora
- Micropiles Seminar ReportDocumento42 pagineMicropiles Seminar ReportAbhishek Trivedi100% (2)
- Seismic Behavior and Design of Composite Steel Plate Shear Walls PDFDocumento73 pagineSeismic Behavior and Design of Composite Steel Plate Shear Walls PDFmanpreetkhanujaNessuna valutazione finora
- Slope Stability Analysis Based On AASHTO 17th & 2018 IBC: Project: Client: Design By: Job No.: Date: Review byDocumento1 paginaSlope Stability Analysis Based On AASHTO 17th & 2018 IBC: Project: Client: Design By: Job No.: Date: Review byjorge01Nessuna valutazione finora
- Manajemen LogistikDocumento68 pagineManajemen LogistikArief HadiNessuna valutazione finora
- NST2602 SGDocumento148 pagineNST2602 SGTshepi Carol DavidsNessuna valutazione finora
- 66KV Corr Al LeafletDocumento3 pagine66KV Corr Al LeafletBijuNessuna valutazione finora
- Compaction Test Report No. / Izvestaj Ispitivanja Zbijenosti BRDocumento1 paginaCompaction Test Report No. / Izvestaj Ispitivanja Zbijenosti BRveljko2008Nessuna valutazione finora
- LIEP Program - School of Continuing StudiesDocumento2 pagineLIEP Program - School of Continuing StudiesshaikhbwcNessuna valutazione finora
- Systems Analysis & Design CH 1Documento4 pagineSystems Analysis & Design CH 1Khaleesi TargNessuna valutazione finora
- ACI 550R Design RecommDocumento8 pagineACI 550R Design Recommyushi liNessuna valutazione finora
- CV - Aqeel Ahmed Qazi Updated - Rev - CompressedDocumento4 pagineCV - Aqeel Ahmed Qazi Updated - Rev - Compressedsidiq7Nessuna valutazione finora
- ST 03 CSDocumento1 paginaST 03 CSDareen BaredNessuna valutazione finora
- Resume BatamDocumento3 pagineResume BatamRommy PutraNessuna valutazione finora
- (RES) Back Up Prot. Isolation and Normalization List - Sejingkat 132-33Kv 80MVA TXF No.2Documento9 pagine(RES) Back Up Prot. Isolation and Normalization List - Sejingkat 132-33Kv 80MVA TXF No.2ericNessuna valutazione finora
- Chapter 2 Engineering Design Process p21-35Documento27 pagineChapter 2 Engineering Design Process p21-35api-152132438Nessuna valutazione finora
- Software Engineering BSIT 44Documento156 pagineSoftware Engineering BSIT 44warrior432Nessuna valutazione finora
- 5 - FAARFIELD Rigid Overlay DesignDocumento33 pagine5 - FAARFIELD Rigid Overlay DesignjimjksnNessuna valutazione finora
- Brochure ClimbingBracket BMK USADocumento4 pagineBrochure ClimbingBracket BMK USAgrishil07Nessuna valutazione finora
- Drive LS SV IP5A Inverter ManualDocumento207 pagineDrive LS SV IP5A Inverter ManualNanang Roni WibowoNessuna valutazione finora
- List of Drawings - Structural DetailsDocumento687 pagineList of Drawings - Structural DetailsCreation Group100% (1)
- Testing of Distance Protection RelaysDocumento8 pagineTesting of Distance Protection RelaysAhmed HamzehNessuna valutazione finora
- Software Engineering, 8th Ed PDFDocumento865 pagineSoftware Engineering, 8th Ed PDFabagirshaNessuna valutazione finora
- Adv Geotech Forensic Eng CompileWebDocumento277 pagineAdv Geotech Forensic Eng CompileWebfarahazuraNessuna valutazione finora
- Aiipl Brochure 1221Documento12 pagineAiipl Brochure 1221SidhuRamNessuna valutazione finora
- USACE Contractor Database As of 23 MAY 22 For PostingDocumento45 pagineUSACE Contractor Database As of 23 MAY 22 For Postingdora tavarezNessuna valutazione finora
- Software Security Engineering A Guide For Project PDFDocumento6 pagineSoftware Security Engineering A Guide For Project PDFVikram AwotarNessuna valutazione finora
- Static Equipment Training ModulesDocumento3 pagineStatic Equipment Training ModulesMohit SinghNessuna valutazione finora
- Automotive Press Fit PDFDocumento4 pagineAutomotive Press Fit PDFmanidesignNessuna valutazione finora