Potrebbero piacerti anche
- Datasheet LRMate-200iD-7L PDFDocumento1 paginaDatasheet LRMate-200iD-7L PDFSalvador BarrónNessuna valutazione finora
- ArcMate0iB Controller30ibDocumento1 paginaArcMate0iB Controller30ibrguzmanabundisNessuna valutazione finora
- Datasheet P 250ib 15Documento1 paginaDatasheet P 250ib 15marius_brkt6284Nessuna valutazione finora
- Arc Mate SeriesDocumento4 pagineArc Mate SeriesIsrael CastroNessuna valutazione finora
- Datasheet R-2000iC-165F PDFDocumento1 paginaDatasheet R-2000iC-165F PDFKrystianNessuna valutazione finora
- Datasheet R 2000ic 165RDocumento1 paginaDatasheet R 2000ic 165RMax Durán ParraguezNessuna valutazione finora
- 794 Fanuc R 2000ib 210f Robot AdatlapDocumento4 pagine794 Fanuc R 2000ib 210f Robot AdatlapMaycon Santos da SilveiraNessuna valutazione finora
- Datasheet PaintMate 200ia 5LDocumento1 paginaDatasheet PaintMate 200ia 5LRafa LozanoNessuna valutazione finora
- R2000iB Specs Bolt PaternDocumento4 pagineR2000iB Specs Bolt Paternto0984903132Nessuna valutazione finora
- 489 Fanuc M 10ia Robot AdatlapDocumento4 pagine489 Fanuc M 10ia Robot AdatlapassNessuna valutazione finora
- Datasheet M 2000ia 2300Documento1 paginaDatasheet M 2000ia 2300maxduran91Nessuna valutazione finora
- R-2000iC-125L HOJA DATOS PDFDocumento1 paginaR-2000iC-125L HOJA DATOS PDFgatolefuNessuna valutazione finora
- Datasheet M-10iD-8LDocumento1 paginaDatasheet M-10iD-8LjosjcrsNessuna valutazione finora
- 631 Fanuc M 710ic 70 Robot AdatlapDocumento4 pagine631 Fanuc M 710ic 70 Robot AdatlapTatang Azis MuslimNessuna valutazione finora
- Airwinches PDFDocumento23 pagineAirwinches PDFIrnaldi Yoza WijayaNessuna valutazione finora
- Sizing - GASLP - OPTIMASS 2400 S400 - REVISED - 150823Documento3 pagineSizing - GASLP - OPTIMASS 2400 S400 - REVISED - 150823nawaz.ahmed.spnutra.comNessuna valutazione finora
- Weight Details of GI Wire and Stay WireDocumento2 pagineWeight Details of GI Wire and Stay WireMayukh Debdas50% (2)
- 500 KG Payload Capacity For Optimal Handling of Large and Heavy LoadsDocumento2 pagine500 KG Payload Capacity For Optimal Handling of Large and Heavy LoadsXanti Zabala Da RosaNessuna valutazione finora
- Portfolio 3Documento16 paginePortfolio 3John LaneNessuna valutazione finora
- Series 4SQ Stepper Motors 1.8°: Not Available For Sale in EuropeDocumento1 paginaSeries 4SQ Stepper Motors 1.8°: Not Available For Sale in EuropeMohd HattaNessuna valutazione finora
- SRA166 210 01A BrochureDocumento2 pagineSRA166 210 01A BrochureXanti Zabala Da RosaNessuna valutazione finora
- Catalogo Acoplamientos LovejoyDocumento1 paginaCatalogo Acoplamientos Lovejoythejuanvi84Nessuna valutazione finora
- OPR - EU 05 18 - Rev 1Documento2 pagineOPR - EU 05 18 - Rev 1dhruv.encontrolsNessuna valutazione finora
- PFCCU - Cube RegisterDocumento145 paginePFCCU - Cube Registermahesh naikNessuna valutazione finora
- ES12 BrochureDocumento2 pagineES12 BrochureXanti Zabala Da RosaNessuna valutazione finora
- Heavy Duty Handling Robots Lift Loads of 350kg: High-Speed MotionDocumento2 pagineHeavy Duty Handling Robots Lift Loads of 350kg: High-Speed MotionXanti Zabala Da RosaNessuna valutazione finora
- MELFA RH-3CH SCARA Robot Brochure PDFDocumento2 pagineMELFA RH-3CH SCARA Robot Brochure PDFVirendra ZopeNessuna valutazione finora
- DL MicroDuct LSZH 12.2019Documento1 paginaDL MicroDuct LSZH 12.2019atif_aman123Nessuna valutazione finora
- Endurance Dyform 18Documento2 pagineEndurance Dyform 18Alexander SeamNessuna valutazione finora
- Pernos Estructurales g5, g8Documento2 paginePernos Estructurales g5, g8Kathy MejíaNessuna valutazione finora
- (EP33-12FR) : VRLA Rechargeable BatteryDocumento1 pagina(EP33-12FR) : VRLA Rechargeable BatteryJoseManuel Aramayo CorderoNessuna valutazione finora
- G342 specREV1Documento40 pagineG342 specREV1Roland LamoureuxNessuna valutazione finora
- Dewpoint Copper DPC-0118-C Product CatalogueDocumento2 pagineDewpoint Copper DPC-0118-C Product Cataloguemye ryeNessuna valutazione finora
- Pap 6600-20-v08Documento3 paginePap 6600-20-v08marc_lobert4808100% (2)
- 60HSD Series: Hybrid Stepper Motors (1.8 Degree)Documento1 pagina60HSD Series: Hybrid Stepper Motors (1.8 Degree)norbertoNessuna valutazione finora
- Civilab: Dynamic Cone Penetration TestDocumento1 paginaCivilab: Dynamic Cone Penetration TestMike MatshonaNessuna valutazione finora
- Vs T/ADocumento3 pagineVs T/ACristhian Daniel SuarezNessuna valutazione finora
- ME314 Fall 2016 Group Design Project: Conceptual Flap Transmission DesignDocumento4 pagineME314 Fall 2016 Group Design Project: Conceptual Flap Transmission DesignMatt BrennerNessuna valutazione finora
- DCT (Dual Clutch Transmission) SystemDocumento72 pagineDCT (Dual Clutch Transmission) Systemwilder0l0pez100% (3)
- 2016 Mustang Alignment SpecsDocumento3 pagine2016 Mustang Alignment SpecsHENRYNessuna valutazione finora
- Technip Document No. 068107C001-702-PDS-0610-003-0Documento10 pagineTechnip Document No. 068107C001-702-PDS-0610-003-0Ryan Goh Chuang HongNessuna valutazione finora
- X3 SlicklineDocumento1 paginaX3 SlicklinefelipeNessuna valutazione finora
- Najran Ra.02 P442 PSB Reach TestDocumento3 pagineNajran Ra.02 P442 PSB Reach TestkarthikNessuna valutazione finora
- MZ07F MZ07LF 1Documento2 pagineMZ07F MZ07LF 1Loi DoanNessuna valutazione finora
- PVC-Insulated Cables: 450/750V Single-Core PVC Insulated, Non-Sheathed CableDocumento1 paginaPVC-Insulated Cables: 450/750V Single-Core PVC Insulated, Non-Sheathed CableThan Zaw HtayNessuna valutazione finora
- Datasheet M 900ib 360Documento1 paginaDatasheet M 900ib 360ariyanto prasetioNessuna valutazione finora
- M-900 Robot Working Range: 360 KG 2655 MMDocumento1 paginaM-900 Robot Working Range: 360 KG 2655 MMKAKAKNessuna valutazione finora
- Hydraulic JumpDocumento7 pagineHydraulic JumpMajorNessuna valutazione finora
- A Guide To Specifying Torque Values For FastenersDocumento3 pagineA Guide To Specifying Torque Values For FastenersSNessuna valutazione finora
- SRDocumento7 pagineSRjuli fitriyantoNessuna valutazione finora
- Examples of ConductorsDocumento16 pagineExamples of ConductorsJubert PerezNessuna valutazione finora
- Datasheet M-710iC-12LDocumento1 paginaDatasheet M-710iC-12LconanbhNessuna valutazione finora
- Extreme Wear Resistance and ToughnessDocumento4 pagineExtreme Wear Resistance and Toughnesssrinivas rao rayuduNessuna valutazione finora
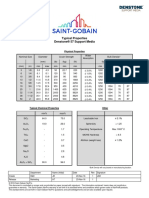
- Denstone® 57 Support Media Typical PropertiesDocumento1 paginaDenstone® 57 Support Media Typical PropertiesJuan Victor Sulvaran ArellanoNessuna valutazione finora
- Motor Heavy Duty - Rev01 01.02.2021Documento6 pagineMotor Heavy Duty - Rev01 01.02.2021fortizuNessuna valutazione finora
- 525 Fanuc M 20ia Robot AdatlapDocumento4 pagine525 Fanuc M 20ia Robot AdatlapGunjan TrivediNessuna valutazione finora
- ARC Mate 100 Robot Working RangeDocumento1 paginaARC Mate 100 Robot Working RangeTamii LópezNessuna valutazione finora
- 3 Teknik Bilgi OSC enDocumento2 pagine3 Teknik Bilgi OSC enabrahim asasNessuna valutazione finora
- Longets Run Section Pressure Plenum 0 0.5 0Documento11 pagineLongets Run Section Pressure Plenum 0 0.5 0IanNessuna valutazione finora
- 14 Supplier Profile PDFDocumento7 pagine14 Supplier Profile PDFشاهين الجازNessuna valutazione finora
- Three Improvements To The Reduceron: Matthew Naylor and Colin Runciman University of YorkDocumento50 pagineThree Improvements To The Reduceron: Matthew Naylor and Colin Runciman University of YorkaldeghaidyNessuna valutazione finora
- Hfe Hitachi Sr-503 603 Service en FRDocumento28 pagineHfe Hitachi Sr-503 603 Service en FRVladimirNessuna valutazione finora
- SENG 440 Slides Lesson 01Documento21 pagineSENG 440 Slides Lesson 01mrgoboomNessuna valutazione finora
- Electromagnetic Spectrum: Juan Carlos Isaza Jacome Byron Cubides Romero Duvan Reyes SaenzDocumento20 pagineElectromagnetic Spectrum: Juan Carlos Isaza Jacome Byron Cubides Romero Duvan Reyes SaenzJuan Carlos Isaza JacomeNessuna valutazione finora
- Wide Band RF TransformersDocumento13 pagineWide Band RF Transformerskbdstl1Nessuna valutazione finora
- Design 5 A.C. GeneratorDocumento7 pagineDesign 5 A.C. GeneratorNoykols GRncNessuna valutazione finora
- كورس حمايه ممتعDocumento151 pagineكورس حمايه ممتعWhite HeartNessuna valutazione finora
- Jonnala 2016Documento8 pagineJonnala 2016sanjay sNessuna valutazione finora
- P30series (메뉴얼)Documento72 pagineP30series (메뉴얼)Luân ThànhNessuna valutazione finora
- 07 July 1969 PDFDocumento100 pagine07 July 1969 PDFclanonNessuna valutazione finora
- ATP FSO ThesisDocumento220 pagineATP FSO ThesisPooja GopalNessuna valutazione finora
- AVT - Air Velocity TransmitterDocumento4 pagineAVT - Air Velocity Transmitternik amirulNessuna valutazione finora
- Manuale NanoVIP3 Rel. 1.5 en (UK)Documento76 pagineManuale NanoVIP3 Rel. 1.5 en (UK)ECNessuna valutazione finora
- 44-48-148-244 Touch STD Manual 2017-05-19Documento112 pagine44-48-148-244 Touch STD Manual 2017-05-19baggo81Nessuna valutazione finora
- Serie 60 Ddec IV Egr Arnes Del VehiculoDocumento4 pagineSerie 60 Ddec IV Egr Arnes Del VehiculoPablo CervantesNessuna valutazione finora
- Electrical Circuits Multiple Choice QuestionsDocumento7 pagineElectrical Circuits Multiple Choice QuestionsTaniyaNessuna valutazione finora
- SerialsDocumento7 pagineSerialsapi-3708126Nessuna valutazione finora
- Short Circuit Analysis Lecture NotesDocumento107 pagineShort Circuit Analysis Lecture NotesSankar MuthuswamyNessuna valutazione finora
- 1 IEEE 4 Node Test Feeder 01-01-2014: Load Flow AnalysisDocumento12 pagine1 IEEE 4 Node Test Feeder 01-01-2014: Load Flow AnalysisSatrio WibowoNessuna valutazione finora
- Whites MXT: The Detector I Use Is A Whites MXT (Or As I Call It My "Wee Noisy!")Documento17 pagineWhites MXT: The Detector I Use Is A Whites MXT (Or As I Call It My "Wee Noisy!")corinne mills100% (2)
- Operation ManualDocumento9 pagineOperation Manualapi-202718495Nessuna valutazione finora
- IEEE Standard Requirements For Secondary Network ProtectorsDocumento56 pagineIEEE Standard Requirements For Secondary Network ProtectorsMahmoud LotfyNessuna valutazione finora
- Digital Communications - Viva Voce QuestionsDocumento3 pagineDigital Communications - Viva Voce QuestionsAllanki Sanyasi Rao100% (1)
- h177 E5 C E5 C-T Digital Temperature Controller Datasheet en PDFDocumento138 pagineh177 E5 C E5 C-T Digital Temperature Controller Datasheet en PDFjohn rodriguezNessuna valutazione finora
- Soal Procedure TextDocumento8 pagineSoal Procedure Textheni faridaNessuna valutazione finora
- An Autonomous Flight Safety SystemDocumento12 pagineAn Autonomous Flight Safety SystemWoofyNessuna valutazione finora
- Vacon NX Inverters FI9 14 User Manual DPD00909A enDocumento106 pagineVacon NX Inverters FI9 14 User Manual DPD00909A enTanuTiganuNessuna valutazione finora
- Quiescent Current DrainDocumento5 pagineQuiescent Current DrainCmj LennonNessuna valutazione finora
- XDJ-RX2 Service ManualDocumento91 pagineXDJ-RX2 Service ManualLincolnNessuna valutazione finora