Potrebbero piacerti anche
- El Ultrasonido TerapéuticoDocumento7 pagineEl Ultrasonido TerapéuticoMarilena Chambi MamaniNessuna valutazione finora
- 1 - Tacto - TripticoDocumento3 pagine1 - Tacto - TripticoGladysBeatrizNessuna valutazione finora
- Portable Lipo Laser BM199 (S)Documento8 paginePortable Lipo Laser BM199 (S)Erick Villegas FrontanillaNessuna valutazione finora
- WEHLLS Lipoláser Smart Plus Manual InteractivoDocumento14 pagineWEHLLS Lipoláser Smart Plus Manual InteractivoWendy0% (1)
- Vendajes QuemadurasDocumento9 pagineVendajes QuemadurasMonica PonceNessuna valutazione finora
- Consentimiento InformadoDocumento12 pagineConsentimiento InformadoJose Lima100% (2)
- Charla Sobre Los Métodos AnticonceptivosDocumento3 pagineCharla Sobre Los Métodos AnticonceptivosmelissaNessuna valutazione finora
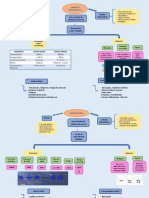
- Corriente de Mediana Frecuencia-Mapa ConceptualDocumento2 pagineCorriente de Mediana Frecuencia-Mapa Conceptualangella100% (2)
- RadiofrecuenciaDocumento3 pagineRadiofrecuenciaOlavePlayNessuna valutazione finora
- Corriente GalvánicaDocumento6 pagineCorriente GalvánicaSebastian Andres Caimanque Cortes67% (3)
- Tema 8 UltrasonidosDocumento11 pagineTema 8 UltrasonidosbrebonNessuna valutazione finora
- Oscilaciones ProfundasDocumento10 pagineOscilaciones ProfundasOmar VargasNessuna valutazione finora
- Tratamientos Mas Recomendados para Combatir La CelulitisDocumento10 pagineTratamientos Mas Recomendados para Combatir La CelulitisLucas Nieves100% (1)
- Material Formacion 4Documento12 pagineMaterial Formacion 4Solecito LopezNessuna valutazione finora
- Manual RFM-4000 A41Documento37 pagineManual RFM-4000 A41Son LuzNessuna valutazione finora
- Pagaré GenéricoDocumento1 paginaPagaré GenéricoLulis RomiNessuna valutazione finora
- 1 Clase Intro. e Intensidad Del MasajeDocumento21 pagine1 Clase Intro. e Intensidad Del MasajeLiliana ConchaNessuna valutazione finora
- Microcorriente - Mapa ConceptualDocumento1 paginaMicrocorriente - Mapa ConceptualangellaNessuna valutazione finora
- EJEMPLO - Mesa Redonda - ImprimirDocumento2 pagineEJEMPLO - Mesa Redonda - ImprimirMercyCarvajalNessuna valutazione finora
- Tarea InyectologiaDocumento18 pagineTarea InyectologiaAndresNessuna valutazione finora
- Inmovilizaciones Rigidas y Elasticas enDocumento9 pagineInmovilizaciones Rigidas y Elasticas enEulise Abrahan Herrera100% (2)
- Masaje Con BambúDocumento4 pagineMasaje Con BambúArasetNessuna valutazione finora
- Cuestionario de Aparatologia CompletoDocumento5 pagineCuestionario de Aparatologia CompletofavianNessuna valutazione finora
- Masaje Con Piedras o GeoterapiaDocumento5 pagineMasaje Con Piedras o GeoterapiaMarxiaMontañoNessuna valutazione finora
- Masajes RelajantesDocumento1 paginaMasajes RelajantesfalconimarNessuna valutazione finora
- DLM M3 Metodo LeducDocumento4 pagineDLM M3 Metodo LeducMumen RiderNessuna valutazione finora
- 105 Hoja de Vida DerechoDocumento2 pagine105 Hoja de Vida DerechoJhonathan Marin100% (1)
- Alta FrecuenciaDocumento10 pagineAlta FrecuenciaMaria Rene Rios CastedoNessuna valutazione finora
- 11 Pelicula Proceso de ReveladoDocumento39 pagine11 Pelicula Proceso de ReveladoJoel ParcoNessuna valutazione finora
- LIPOLASERDocumento6 pagineLIPOLASERALEJANDRA AGUILARNessuna valutazione finora
- Resultados SaludDigna3.0Documento1 paginaResultados SaludDigna3.0HumbertoNessuna valutazione finora
- LIPOLASER NefrithDocumento9 pagineLIPOLASER NefrithEcocomputo EcocomputoNessuna valutazione finora
- WEHLLS Lipolaser Digital Manual InteractivoDocumento12 pagineWEHLLS Lipolaser Digital Manual InteractivoMonserrat VANessuna valutazione finora
- Frecuencia Del Ultrasonido TerapéuticoDocumento18 pagineFrecuencia Del Ultrasonido TerapéuticoanaNessuna valutazione finora
- Mal PraxisDocumento8 pagineMal Praxisanthony ramoneNessuna valutazione finora
- Corriente GalvanicaDocumento5 pagineCorriente GalvanicaNoe AvendaNessuna valutazione finora
- Técnicas Asepsia, Heridas, Curación y VendajeDocumento29 pagineTécnicas Asepsia, Heridas, Curación y VendajeKevin Emanuel HerreraNessuna valutazione finora
- Clase UltrasonidoDocumento36 pagineClase UltrasonidoclaudiaNessuna valutazione finora
- MasajeDocumento8 pagineMasajeVeronica Pabon100% (1)
- Unidad 4 Heridas y QuemadurasDocumento19 pagineUnidad 4 Heridas y QuemadurasSergio DiazNessuna valutazione finora
- Teoria Del Masaje 1Documento16 pagineTeoria Del Masaje 1kelly parraNessuna valutazione finora
- Reflejo TricipitalDocumento2 pagineReflejo TricipitalWilliam SolisNessuna valutazione finora
- Tarea 4. Ensayo de MasoterapiaDocumento6 pagineTarea 4. Ensayo de MasoterapiaGerardo IsaíNessuna valutazione finora
- Corrientes de Alta FrecuenciaDocumento7 pagineCorrientes de Alta FrecuenciaN only100% (1)
- PRESOTERAPIADocumento2 paginePRESOTERAPIAisabelNessuna valutazione finora
- 2 5 Modelo de Carta de Referencia Personal 39Documento3 pagine2 5 Modelo de Carta de Referencia Personal 39Daniel ArizaNessuna valutazione finora
- Bitacora 2000BDocumento17 pagineBitacora 2000BzaraevaNessuna valutazione finora
- Formulario de Registro Embarazada y Recién Nacido 2012Documento2 pagineFormulario de Registro Embarazada y Recién Nacido 2012Elvira SepulvedaNessuna valutazione finora
- BROSSAGE Karen DuranDocumento3 pagineBROSSAGE Karen DuranKaren RoperoNessuna valutazione finora
- ELECTROPORACIÓN Julieth Paola Pitre de AvilaDocumento8 pagineELECTROPORACIÓN Julieth Paola Pitre de AvilaYulieth PaolaNessuna valutazione finora
- Resumen Protocolo de TendonesDocumento6 pagineResumen Protocolo de TendonesFelipe Perez BustamanteNessuna valutazione finora
- Autorización para MicropigmentaciónDocumento4 pagineAutorización para MicropigmentaciónMiguel Garcia GNessuna valutazione finora
- Definición de Ultrasonido y Ultrasonido EstéticoDocumento5 pagineDefinición de Ultrasonido y Ultrasonido Estéticojhonny_666Nessuna valutazione finora
- Patrones FuncionalesDocumento9 paginePatrones FuncionalesDaniel CRNessuna valutazione finora
- Efectos Nocivos para La Salud Del Uso Excesivo de Los CelularesDocumento9 pagineEfectos Nocivos para La Salud Del Uso Excesivo de Los Celularesmercedes vasquezNessuna valutazione finora
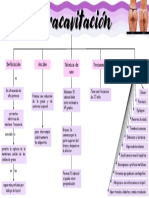
- Mapa Conceptual de UltracavitacionDocumento1 paginaMapa Conceptual de UltracavitacionRosario RamirezNessuna valutazione finora
- Gran QuemadoDocumento6 pagineGran QuemadoAder Agüero VegaNessuna valutazione finora
- CONCEPTOS BÁSICOS DE ULTRASONOGRAFÍA APLICADA A LA ANESTESIA REGIONAL AltermattDocumento7 pagineCONCEPTOS BÁSICOS DE ULTRASONOGRAFÍA APLICADA A LA ANESTESIA REGIONAL AltermattJuan SosaNessuna valutazione finora
- Ut 5 EcoDocumento76 pagineUt 5 EcofranciscoNessuna valutazione finora
- Documento ICS26Documento32 pagineDocumento ICS26RAMIRO GARCIA CANCELANessuna valutazione finora
- Historia-Medicina BuzziDocumento3 pagineHistoria-Medicina BuzzisaloNessuna valutazione finora
- Carta de Belgrano A San Martin PDFDocumento5 pagineCarta de Belgrano A San Martin PDFJorge Gomez PerezNessuna valutazione finora
- David Ricardo Principios de Economia Politica y Tributacion Cap 1 y 2 PDFDocumento32 pagineDavid Ricardo Principios de Economia Politica y Tributacion Cap 1 y 2 PDFDaniela Peña100% (1)
- Art - Original 7-13Documento7 pagineArt - Original 7-13saloNessuna valutazione finora
- Despertar - de - La - Medicina ÁrabeDocumento13 pagineDespertar - de - La - Medicina ÁrabeAna SbattellaNessuna valutazione finora
- Medico Legal BantiDocumento3 pagineMedico Legal BantisaloNessuna valutazione finora
- 29 A 33) Bores - INTERNET BajaDocumento5 pagine29 A 33) Bores - INTERNET BajasaloNessuna valutazione finora
- Rev 4 2019 - Pag 34 36 - ValergaDocumento3 pagineRev 4 2019 - Pag 34 36 - ValergasaloNessuna valutazione finora
- Rev 4 2017 Pag 36 AngueiraDocumento2 pagineRev 4 2017 Pag 36 AngueirasaloNessuna valutazione finora
- Rev 3 2019 Pag 19 26 Simari MonicaDocumento8 pagineRev 3 2019 Pag 19 26 Simari MonicasaloNessuna valutazione finora
- Revista 1 2014 Pag 34 A 38Documento5 pagineRevista 1 2014 Pag 34 A 38saloNessuna valutazione finora
- Rev 3 2019 Pag 34 38 ME BorgarelloDocumento5 pagineRev 3 2019 Pag 34 38 ME BorgarellosaloNessuna valutazione finora
- Rev 4 2017 Pag 33 LosardoDocumento3 pagineRev 4 2017 Pag 33 LosardosaloNessuna valutazione finora
- Rev 3 2019 Pag 9 Semblanza DR Zabalua R ReussiDocumento1 paginaRev 3 2019 Pag 9 Semblanza DR Zabalua R ReussisaloNessuna valutazione finora
- Rev-2-2015-Pag-7 - SORIA PDFDocumento10 pagineRev-2-2015-Pag-7 - SORIA PDFsaloNessuna valutazione finora
- Rev 3 2019 Pag 14 18 - JM Saá PDFDocumento5 pagineRev 3 2019 Pag 14 18 - JM Saá PDFsaloNessuna valutazione finora
- Revista Ama 1 2010 EditorialDocumento4 pagineRevista Ama 1 2010 EditorialsaloNessuna valutazione finora
- Revista Ama 1 2010 Historia MedicinaDocumento9 pagineRevista Ama 1 2010 Historia MedicinasaloNessuna valutazione finora
- Revista 1 2013 Pag 24 A 27Documento4 pagineRevista 1 2013 Pag 24 A 27saloNessuna valutazione finora
- Rev 3 2019 Pag 4 8 G FernandezDocumento5 pagineRev 3 2019 Pag 4 8 G FernandezsaloNessuna valutazione finora
- Revista Ama 1 2010 HidatidosisDocumento8 pagineRevista Ama 1 2010 HidatidosissaloNessuna valutazione finora
- Rev 4 2018 Pag 31 32 Hurtado HoyoDocumento2 pagineRev 4 2018 Pag 31 32 Hurtado HoyosaloNessuna valutazione finora
- Rev 2 2015 Pag 9 RubilarDocumento5 pagineRev 2 2015 Pag 9 RubilarsaloNessuna valutazione finora
- Rev 4 2018 Pag 21 24 ValergaDocumento4 pagineRev 4 2018 Pag 21 24 ValergasaloNessuna valutazione finora
- Rev 2 2018 Pag 31 36 AgueroDocumento6 pagineRev 2 2018 Pag 31 36 AguerosaloNessuna valutazione finora
- Monti 25-28Documento4 pagineMonti 25-28saloNessuna valutazione finora
- Rev 2 2011 Pag 11 12 - ConsultorDocumento2 pagineRev 2 2011 Pag 11 12 - ConsultorsaloNessuna valutazione finora
- Buzzi 32-40Documento9 pagineBuzzi 32-40saloNessuna valutazione finora
- Rev 2 2018 Pag 7 26 SturlaDocumento20 pagineRev 2 2018 Pag 7 26 SturlasaloNessuna valutazione finora
- Bacigaluppi 16-24Documento9 pagineBacigaluppi 16-24saloNessuna valutazione finora
- Torsion CircularDocumento8 pagineTorsion CircularJhon Humerez PairumaniNessuna valutazione finora
- Balances de Materia Sin Reaccion QuimicaDocumento3 pagineBalances de Materia Sin Reaccion QuimicaLuis David RodriguezNessuna valutazione finora
- 03 Balance de Materia Con Reaccion Quimica Hidratacion de Anhidrido AceticoDocumento9 pagine03 Balance de Materia Con Reaccion Quimica Hidratacion de Anhidrido AceticoAlexisEstradaNessuna valutazione finora
- Instalación de Trigeneración para Un Hospital PDFDocumento239 pagineInstalación de Trigeneración para Un Hospital PDFnugonNessuna valutazione finora
- MT-1432-2020-Medidor de Soldadura PDFDocumento3 pagineMT-1432-2020-Medidor de Soldadura PDFAna Abanto AlvarezNessuna valutazione finora
- NCH 1019Documento3 pagineNCH 1019Roberto Esteban Basconé Vega67% (3)
- Informe N°6 Laboratorio de Física II UNMSMDocumento18 pagineInforme N°6 Laboratorio de Física II UNMSMFernando SánchezNessuna valutazione finora
- Ejercicio 4Documento5 pagineEjercicio 4Luisita X3Nessuna valutazione finora
- MuroDocumento15 pagineMuroVladimir Lopez ZamoraNessuna valutazione finora
- PAEG Fisica 12 Sept SolucionarioDocumento8 paginePAEG Fisica 12 Sept SolucionarioJuanAntonioNaranjoNavasNessuna valutazione finora
- Integrales ImpropiasDocumento6 pagineIntegrales ImpropiasEduardo SucreNessuna valutazione finora
- Densidad AparenteDocumento3 pagineDensidad AparenteAlisoonNessuna valutazione finora
- Proyecto de Electronicos 1 FuenteDocumento36 pagineProyecto de Electronicos 1 FuenteJuan Carlos Manrique DfrNessuna valutazione finora
- RHEEM MUSo Termo Eléctrico 189L246L303L454LDocumento28 pagineRHEEM MUSo Termo Eléctrico 189L246L303L454Leariasz69Nessuna valutazione finora
- Tarea 1 Sin EjercicioDocumento4 pagineTarea 1 Sin EjercicioAndreina SanchezNessuna valutazione finora
- Cueva Navas Toro Algebra Lineal Febrero 2010Documento238 pagineCueva Navas Toro Algebra Lineal Febrero 2010Torres Rommel100% (1)
- Rotaciones CompuestasDocumento4 pagineRotaciones CompuestasMissael VegaNessuna valutazione finora
- Filtros Pasivos y ActivosDocumento20 pagineFiltros Pasivos y ActivosCar GuerraNessuna valutazione finora
- Informe Fisicoquímica II Destilacion Por Arrastre de VaporDocumento9 pagineInforme Fisicoquímica II Destilacion Por Arrastre de VaporDaniel Gomez Galindo0% (1)
- Propiedades Fisicas y Quimicas de Los Compuestos OrganicosDocumento7 paginePropiedades Fisicas y Quimicas de Los Compuestos Organicoscarola80% (30)
- Introduccion A Los Mecanismos PDFDocumento6 pagineIntroduccion A Los Mecanismos PDFMary SquerraNessuna valutazione finora
- Proceso de Fabricacion de CementoDocumento66 pagineProceso de Fabricacion de CementoJuan Carlos Ramos CentenoNessuna valutazione finora
- Cinemática I PDFDocumento8 pagineCinemática I PDFValeria Gutierrez OrellanaNessuna valutazione finora
- FerrocarrilesDocumento20 pagineFerrocarrilesgondolines100% (3)
- Listado Asignaturas MUIA SATA-1Documento1 paginaListado Asignaturas MUIA SATA-1sdwafdNessuna valutazione finora
- Microsoft Word - Repartido N 1 Transporte Ionico 2010Documento4 pagineMicrosoft Word - Repartido N 1 Transporte Ionico 2010Santiago MedinaNessuna valutazione finora
- Qué Es Un Relé y para Que SirveDocumento1 paginaQué Es Un Relé y para Que SirveSandino JoseNessuna valutazione finora
- 044 Planificar El Trabajo Antes de EjecutarloDocumento1 pagina044 Planificar El Trabajo Antes de EjecutarloCarla Sandra0% (1)
- QuimicaDocumento6 pagineQuimicaJean GiraldoNessuna valutazione finora