Potrebbero piacerti anche
- Prácticas de redes de datos e industrialesDa EverandPrácticas de redes de datos e industrialesValutazione: 4 su 5 stelle4/5 (5)
- VW Polo Amf 2003 Esquema Gestion MotorDocumento9 pagineVW Polo Amf 2003 Esquema Gestion MotorCiro Sánchez MártilNessuna valutazione finora
- BDocumento17 pagineBFredySonccoNessuna valutazione finora
- E. Bernardini PDFDocumento264 pagineE. Bernardini PDFfrankt fernando florez santiago85% (13)
- CanBus CanOpenDocumento38 pagineCanBus CanOpenLuis Alonso Garcia TachoNessuna valutazione finora
- Alternadores automotrices referencias BoschDocumento14 pagineAlternadores automotrices referencias BoschGerardo Alexander Azañero AlaniaNessuna valutazione finora
- Cálculo de EmbraguesDocumento11 pagineCálculo de EmbraguesNocivo Bryan73% (15)
- Curso Inyeccion DieselDocumento101 pagineCurso Inyeccion DieselJabali JakunaNessuna valutazione finora
- OF1721Documento11 pagineOF1721edgardomestreNessuna valutazione finora
- Manual de Codificación de FallasDocumento200 pagineManual de Codificación de Fallassfde seNessuna valutazione finora
- Oc-500-Rf-1943 - RS G7 PDFDocumento1 paginaOc-500-Rf-1943 - RS G7 PDFGabino Rey CerónNessuna valutazione finora
- Comprobacion Funcional DTCDocumento76 pagineComprobacion Funcional DTCChristiam OrtegaNessuna valutazione finora
- Manual Espanol 2007 Max TruckDocumento78 pagineManual Espanol 2007 Max TruckRichar Eladio Centeno CarielesNessuna valutazione finora
- Sistemas de SeguridadDocumento102 pagineSistemas de SeguridadYam FerNessuna valutazione finora
- Volvo 9800 Data SheetDocumento7 pagineVolvo 9800 Data SheetLuis Andres MartinezNessuna valutazione finora
- Manual Instrucciones Tecnicas Sistema Aire Acondicionado Climabuss Omnibus Utilizacion Paneles IndicadoresDocumento80 pagineManual Instrucciones Tecnicas Sistema Aire Acondicionado Climabuss Omnibus Utilizacion Paneles IndicadoresMario GiacopelliNessuna valutazione finora
- 8150402083 (1)Documento44 pagine8150402083 (1)Gonzalo SepulvedaNessuna valutazione finora
- Manual de Admision de AireDocumento40 pagineManual de Admision de AireMauricio Andrade100% (1)
- Distribucion VariableDocumento29 pagineDistribucion VariableLuis MolinaNessuna valutazione finora
- Chevrolet-Prisma 2019 ES AR Afa8c85c75Documento216 pagineChevrolet-Prisma 2019 ES AR Afa8c85c75Miguel Angel LajoNessuna valutazione finora
- Manual Tacografo Limitador VelocidadDocumento76 pagineManual Tacografo Limitador VelocidadCristobal HuertaNessuna valutazione finora
- Pintura ModernaDocumento519 paginePintura ModernaChristian MazzucaNessuna valutazione finora
- Códigos de Avería Genéricos y Específicos. Acceso GratuitoDocumento139 pagineCódigos de Avería Genéricos y Específicos. Acceso Gratuitowilson orlando morales ospinaNessuna valutazione finora
- Marcopolo Entradas y Salidas Multiplex g6Documento3 pagineMarcopolo Entradas y Salidas Multiplex g6Elver ChayguaqueNessuna valutazione finora
- Esquema de Funcionamiento Sistema Eléctrico Tratamiento Posterior de Los Gases de EscapeDocumento8 pagineEsquema de Funcionamiento Sistema Eléctrico Tratamiento Posterior de Los Gases de EscapeTrafalgar LawNessuna valutazione finora
- Codigos Multiplex 3Documento153 pagineCodigos Multiplex 3Fernando ZamoraNessuna valutazione finora
- MH-033-00-Manual de Taller IriconfortDocumento38 pagineMH-033-00-Manual de Taller IriconfortJavier Jimenez PerezNessuna valutazione finora
- Tema 4 - Sistemas CAN BUS y Unidades de Control Electrónico ECUSDocumento23 pagineTema 4 - Sistemas CAN BUS y Unidades de Control Electrónico ECUSDeyber Luiseduardo Rosas AlcaldeNessuna valutazione finora
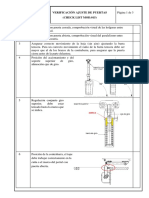
- Ajuste de Puerta MasatsDocumento3 pagineAjuste de Puerta Masatsalberto torresNessuna valutazione finora
- Estudio de Mecanica de Suelos PDFDocumento34 pagineEstudio de Mecanica de Suelos PDFMónica Zavala RodríguezNessuna valutazione finora
- Motor Daily A Metano 8140Documento103 pagineMotor Daily A Metano 8140mantenimiento margarita100% (1)
- Comparativo MidibusDocumento21 pagineComparativo MidibusGary BamNessuna valutazione finora
- Inyeccion Caudalimetros y Otros SensoresDocumento85 pagineInyeccion Caudalimetros y Otros SensorespepeNessuna valutazione finora
- Opel MerivaDocumento4 pagineOpel MerivaleonardoNessuna valutazione finora
- Curso de operación del camión Caterpillar 777DDocumento64 pagineCurso de operación del camión Caterpillar 777DJesus Armas CiprianoNessuna valutazione finora
- El Problema de ColindanciaDocumento4 pagineEl Problema de ColindanciaBrayanAlcocerMedinaNessuna valutazione finora
- Catalogo Baterias PrestoliteDocumento16 pagineCatalogo Baterias PrestoliteINyDEClaudioNessuna valutazione finora
- Manual Instalacion Pronnect240 440 PDFDocumento2 pagineManual Instalacion Pronnect240 440 PDFDamian FediukNessuna valutazione finora
- OH1636Documento17 pagineOH1636Eco DMA SASNessuna valutazione finora
- Definición Del MultiplexDocumento5 pagineDefinición Del Multiplexaudio_videoNessuna valutazione finora
- Manual Aire Acondicionado Spheros CityVent PDFDocumento20 pagineManual Aire Acondicionado Spheros CityVent PDFcesanaNessuna valutazione finora
- MB OM 926 LA V/22 Euro V motor especificacionesDocumento2 pagineMB OM 926 LA V/22 Euro V motor especificacionesTomás Agustín Misture100% (1)
- Tarea Reparar Frenos AbsDocumento18 pagineTarea Reparar Frenos AbsEliseo huamanNessuna valutazione finora
- Funcion Tipos Ede Arranque Volvo B12RDocumento2 pagineFuncion Tipos Ede Arranque Volvo B12RDAVID SALVADORNessuna valutazione finora
- SDP 1000032 03Documento14 pagineSDP 1000032 03Simón Huanca Gallardo100% (1)
- Frimecbuses2017 Web1Documento31 pagineFrimecbuses2017 Web1Diego Giovio100% (1)
- Chasis Oc 500 MB PDFDocumento20 pagineChasis Oc 500 MB PDFAntonio UgartecheaNessuna valutazione finora
- Pe5400b0025b PDFDocumento63 paginePe5400b0025b PDFErwin Fabian Paris NavarroNessuna valutazione finora
- Cesquema de Circuitos Eléctricos Retardador (Hidráulico)Documento3 pagineCesquema de Circuitos Eléctricos Retardador (Hidráulico)roger ccasaNessuna valutazione finora
- Electricidad BasicaDocumento18 pagineElectricidad Basicadani1laleyNessuna valutazione finora
- NOSSO Electropartes07Documento8 pagineNOSSO Electropartes07Jesus CarNessuna valutazione finora
- Calibración a cero del transmisor del ángulo de dirección -G85Documento2 pagineCalibración a cero del transmisor del ángulo de dirección -G85Toni diestreNessuna valutazione finora
- Inyección ElectrónicaDocumento3 pagineInyección ElectrónicaJesús GINessuna valutazione finora
- O-500r 1830Documento2 pagineO-500r 1830Guerrero Obando Guerrero ObandoNessuna valutazione finora
- Motor TSIDocumento4 pagineMotor TSICarlos RiveraNessuna valutazione finora
- Daf Ecas EsDocumento2 pagineDaf Ecas EssergioNessuna valutazione finora
- (VOLKSWAGEN) Esquema Electrico Cierre Centralizado Volkswagen Polo 1994Documento2 pagine(VOLKSWAGEN) Esquema Electrico Cierre Centralizado Volkswagen Polo 1994Elio MalvaresNessuna valutazione finora
- Viaggio 1050 0 500 RS 1941Documento2 pagineViaggio 1050 0 500 RS 1941Ricardo LunaNessuna valutazione finora
- 017 - Equipo Electrico e InstrumentosDocumento14 pagine017 - Equipo Electrico e InstrumentosPaulo Seguel TroncosoNessuna valutazione finora
- Esquema eléctrico vehículo comercialDocumento14 pagineEsquema eléctrico vehículo comercialEco DMA SASNessuna valutazione finora
- Particularidades Elementos de La CarroceriaDocumento3 pagineParticularidades Elementos de La CarroceriaOscar BarajasNessuna valutazione finora
- GuiaA1 11 2016Documento17 pagineGuiaA1 11 2016Héctor MedinaNessuna valutazione finora
- Circuitos Intermitencias PDFDocumento4 pagineCircuitos Intermitencias PDFjjossette11Nessuna valutazione finora
- ControlAreaNetwork CANDocumento9 pagineControlAreaNetwork CANCristiam QuispeNessuna valutazione finora
- Marco Teórico CANDocumento7 pagineMarco Teórico CANFidel AlejandroNessuna valutazione finora
- Interfaz CAN BusDocumento5 pagineInterfaz CAN BusDario Orosco OrozcoNessuna valutazione finora
- Obd IiDocumento26 pagineObd IiJonatan MarquezNessuna valutazione finora
- Tercer Parcial Control de Calidad 1Documento15 pagineTercer Parcial Control de Calidad 1Luis MolinaNessuna valutazione finora
- Pruebas APDocumento4 paginePruebas APLuis MolinaNessuna valutazione finora
- ArticuloDocumento11 pagineArticuloLuis MolinaNessuna valutazione finora
- Inyectores MaquetaDocumento5 pagineInyectores MaquetaLuis MolinaNessuna valutazione finora
- Inyectores MaquetaDocumento2 pagineInyectores MaquetaLuis MolinaNessuna valutazione finora
- Fases Del DiseñoDocumento1 paginaFases Del DiseñoLuis MolinaNessuna valutazione finora
- Poli MerosDocumento5 paginePoli MerosLuis MolinaNessuna valutazione finora
- Presentacion NeumaticosDocumento24 paginePresentacion NeumaticosLuis MolinaNessuna valutazione finora
- Ceramic OsDocumento3 pagineCeramic OsLuis MolinaNessuna valutazione finora
- Presentacion NeumaticosDocumento24 paginePresentacion NeumaticosLuis MolinaNessuna valutazione finora
- Ceramic OsDocumento3 pagineCeramic OsLuis MolinaNessuna valutazione finora
- SobrealimentacionDocumento46 pagineSobrealimentacionLuis MolinaNessuna valutazione finora
- Los GerentesDocumento15 pagineLos GerentesLuis MolinaNessuna valutazione finora
- Los GerentesDocumento15 pagineLos GerentesLuis MolinaNessuna valutazione finora
- Funciones de La AministracionDocumento14 pagineFunciones de La AministracionDamián LópezNessuna valutazione finora
- TwidoDocumento39 pagineTwidoJef PerezNessuna valutazione finora
- Producción de Plástico A Partir de Cáscara de CamarónDocumento7 pagineProducción de Plástico A Partir de Cáscara de CamarónMaribelita AngamarcaNessuna valutazione finora
- Planos 010Documento27 paginePlanos 010Christian HuamanNessuna valutazione finora
- Anclaje en Pavimentos - RígidosDocumento20 pagineAnclaje en Pavimentos - RígidosDlutkx ZeqNessuna valutazione finora
- Desmontaje CAJA C3Documento4 pagineDesmontaje CAJA C3Santiago MontoyaNessuna valutazione finora
- Selector línea eléctrica By-Pass trifásicoDocumento1 paginaSelector línea eléctrica By-Pass trifásicodulcesinestesiaNessuna valutazione finora
- Ley de aleaciones de metales preciososDocumento2 pagineLey de aleaciones de metales preciososbrayanNessuna valutazione finora
- NORMA-NTE-E050-NECDocumento20 pagineNORMA-NTE-E050-NECNefi Aron Salas MamaniNessuna valutazione finora
- Isometrico: Mamparas en SanitariosDocumento1 paginaIsometrico: Mamparas en SanitariosOskar JiménezNessuna valutazione finora
- 4.6 RAM Simulacion de Una Planta PetroleraDocumento6 pagine4.6 RAM Simulacion de Una Planta PetroleraRonald Vargas SirpaNessuna valutazione finora
- Ampliar estética unisex Betty con distribuidora de bellezaDocumento6 pagineAmpliar estética unisex Betty con distribuidora de bellezaCindy QuirozNessuna valutazione finora
- Casos de InventariosDocumento21 pagineCasos de InventariosEdgar Miguel Bravo Esquen0% (1)
- Clase 4 - 4 Seguridad y Salud - Tecnologia de La Construccion I - Ing. CachayDocumento48 pagineClase 4 - 4 Seguridad y Salud - Tecnologia de La Construccion I - Ing. Cachaymiguel angelNessuna valutazione finora
- R. Lavado de AgribonDocumento4 pagineR. Lavado de AgribonLuis AdoLfo GalindoNessuna valutazione finora
- Aceites UsadosDocumento27 pagineAceites UsadosFernando Garcia HiguitaNessuna valutazione finora
- Historia de Vida Frederick Winslow TaylorDocumento21 pagineHistoria de Vida Frederick Winslow TaylorCARMEN INES ZELADA CACEDANessuna valutazione finora
- Norma ASTM A194 (Tuercas 2h)Documento6 pagineNorma ASTM A194 (Tuercas 2h)Jorge Eduardo Calero CandamilNessuna valutazione finora
- Riesgos ambientales por fabricación de tejas artesanales en Piñipampa, CuscoDocumento15 pagineRiesgos ambientales por fabricación de tejas artesanales en Piñipampa, CuscoLigia Winny Puma PauccarNessuna valutazione finora
- Procesos de Soldadura Mig-Mag22Documento9 pagineProcesos de Soldadura Mig-Mag22Leonardo GomezNessuna valutazione finora
- Ficha Tecnica - Bota Bracol CordonesDocumento2 pagineFicha Tecnica - Bota Bracol CordonesiivannqNessuna valutazione finora
- Anexo 1 - Catalogo de ConceptosDocumento9 pagineAnexo 1 - Catalogo de ConceptosElmer Hernández CáceresNessuna valutazione finora
- Informe de LadrillosDocumento14 pagineInforme de LadrillosFredy Ponceca AncaNessuna valutazione finora
- Diágnostico Del Desalineamiento de EjesDocumento23 pagineDiágnostico Del Desalineamiento de EjesRomer Baltazar100% (1)
- PDG HL 4 S Cadena Ret SuspDocumento2 paginePDG HL 4 S Cadena Ret SuspkjkljkljlkjljlkNessuna valutazione finora
- MovigearDocumento288 pagineMovigearJonathan CheuquianNessuna valutazione finora