Potrebbero piacerti anche
- Tabela de Torque Vedamec PDFDocumento1 paginaTabela de Torque Vedamec PDFDanilo M Alves56% (9)
- Controladores lógicos programáveis práticaDocumento61 pagineControladores lógicos programáveis práticaLeonardo Costa100% (1)
- Bosch Catálogo Ignição Sistemas Convencionais 2012/2013Documento64 pagineBosch Catálogo Ignição Sistemas Convencionais 2012/2013LEODECIO BELO DE OLIVEIRA85% (27)
- Esquema Eletrico PrismaDocumento2 pagineEsquema Eletrico PrismaAlex Po72% (18)
- Arduino robô visão computacionalDocumento44 pagineArduino robô visão computacionalEtelvino OliveiraNessuna valutazione finora
- Manual Promark500Documento306 pagineManual Promark500Erison Barros0% (1)
- Tabela Roscas PDFDocumento32 pagineTabela Roscas PDFvmeottiNessuna valutazione finora
- Guia Prático para Instalação e Utilização Do Software SEL-5032 AcSELerator ArchitectDocumento35 pagineGuia Prático para Instalação e Utilização Do Software SEL-5032 AcSELerator ArchitectHenrique Pereira MachadoNessuna valutazione finora
- TCC Sobre Termo Vácuo PDFDocumento115 pagineTCC Sobre Termo Vácuo PDFLucas MoreiraNessuna valutazione finora
- Proposta Link 12MbpsDocumento5 pagineProposta Link 12MbpsBruno Fonseca100% (1)
- ORATOPDocumento13 pagineORATOPramilanezNessuna valutazione finora
- Universidade FeevaleDocumento76 pagineUniversidade FeevaleDouglas SobralNessuna valutazione finora
- Análise da variação de fase do comando de válvulas em motor Otto turboDocumento58 pagineAnálise da variação de fase do comando de válvulas em motor Otto turboDouglas SobralNessuna valutazione finora
- Opm 0000236 08Documento65 pagineOpm 0000236 08Eduardo FagundesNessuna valutazione finora
- Desenvolvimento de Sistema de Controle e Automação para Câmara Termo Vácuo Utilizada para Testes de Componentes em Condições EspaciaisDocumento64 pagineDesenvolvimento de Sistema de Controle e Automação para Câmara Termo Vácuo Utilizada para Testes de Componentes em Condições EspaciaisDouglas SobralNessuna valutazione finora
- Simulação Comando de VálvulasDocumento139 pagineSimulação Comando de VálvulasDouglas SobralNessuna valutazione finora
- DM 33 - 2017 Willie Duarte TeixeiraDocumento94 pagineDM 33 - 2017 Willie Duarte TeixeiraDouglas SobralNessuna valutazione finora
- NBR 14039 Instalacoes Eletricas Media Tensao PDFDocumento65 pagineNBR 14039 Instalacoes Eletricas Media Tensao PDFDiego FreitasNessuna valutazione finora
- Análise de comandos de válvulas para ganho de rendimentoDocumento47 pagineAnálise de comandos de válvulas para ganho de rendimentoDouglas SobralNessuna valutazione finora
- VVM BR PTDocumento72 pagineVVM BR PTRicardo PossebonNessuna valutazione finora
- Tendencias UsinagemDocumento36 pagineTendencias UsinagemJovanaNessuna valutazione finora
- Manual Alternador Stamford PDFDocumento122 pagineManual Alternador Stamford PDFAnderson103Nessuna valutazione finora
- Opm 0000235 16 PDFDocumento58 pagineOpm 0000235 16 PDFAnonymous FBw5y0HSyNessuna valutazione finora
- IotDocumento50 pagineIotEmerson LeiteNessuna valutazione finora
- Scania PDFDocumento16 pagineScania PDFDouglas SobralNessuna valutazione finora
- Scania PDFDocumento16 pagineScania PDFDouglas SobralNessuna valutazione finora
- Manual FasímetroDocumento8 pagineManual FasímetroluzerosNessuna valutazione finora
- Lavadoras Hidromar manuaisDocumento2 pagineLavadoras Hidromar manuaisDouglas SobralNessuna valutazione finora
- Meriva 2009 Ficha Tecnica Conteudos PDFDocumento11 pagineMeriva 2009 Ficha Tecnica Conteudos PDFDouglas SobralNessuna valutazione finora
- Opm 0000235 16 PDFDocumento58 pagineOpm 0000235 16 PDFAnonymous FBw5y0HSyNessuna valutazione finora
- Regulamento Tecnico GM 2019Documento16 pagineRegulamento Tecnico GM 2019Douglas SobralNessuna valutazione finora
- Etapas Processamento PedidoDocumento2 pagineEtapas Processamento PedidoKelson FoxNessuna valutazione finora
- Medidas de Resistência de Cabos de Motores e Isolamentos.Documento8 pagineMedidas de Resistência de Cabos de Motores e Isolamentos.André OliveiraNessuna valutazione finora
- Subwoofer Bomber One 8polegadasDocumento1 paginaSubwoofer Bomber One 8polegadasDaniel ObataNessuna valutazione finora
- Engrenagens: tipos e aplicaçõesDocumento56 pagineEngrenagens: tipos e aplicaçõesEduardo Barbosa Leal100% (1)
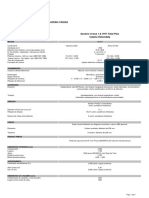
- Ficha Chevrolet Prisma 2012 PDFDocumento5 pagineFicha Chevrolet Prisma 2012 PDFDouglas SobralNessuna valutazione finora
- Tudo Sobre ProcessadorDocumento5 pagineTudo Sobre ProcessadorJon AraujoNessuna valutazione finora
- Usando o Controle ReportViewer Do WinForms - Microsoft DocsDocumento25 pagineUsando o Controle ReportViewer Do WinForms - Microsoft DocsSales JuniorNessuna valutazione finora
- Configurações de DNS Centos 7Documento4 pagineConfigurações de DNS Centos 7Anonymous cZGJ7Rsk1Nessuna valutazione finora
- Connectio Je03 Rev3.00Documento11 pagineConnectio Je03 Rev3.00Pedro Augusto PeresNessuna valutazione finora
- Acesso RemotoDocumento2 pagineAcesso RemotoFrederico PimentelNessuna valutazione finora
- FundCompArq24hDocumento93 pagineFundCompArq24hvictor_timaoNessuna valutazione finora
- Audacity - Editor de áudio gratuito com efeitos e recursos profissionaisDocumento4 pagineAudacity - Editor de áudio gratuito com efeitos e recursos profissionaisJose Roberto MartinezNessuna valutazione finora
- LG DVD Player 556/586Documento20 pagineLG DVD Player 556/586Geraldo Majella GuimaraesNessuna valutazione finora
- Caderno de Atividades - MISI e MCD - 2º Redes - AgostoDocumento8 pagineCaderno de Atividades - MISI e MCD - 2º Redes - AgostoJosé VidalNessuna valutazione finora
- Guia Do Estudante P2000 3.8 & CK720 e CK721-Rev369Documento268 pagineGuia Do Estudante P2000 3.8 & CK720 e CK721-Rev369Carlos Eberhard Diaz TorresNessuna valutazione finora
- Manual de Instalação Do Software AutoTOPO PDFDocumento25 pagineManual de Instalação Do Software AutoTOPO PDFjormaxfilhoNessuna valutazione finora
- Redes de Telefonia Celular e Transmissão de DadosDocumento48 pagineRedes de Telefonia Celular e Transmissão de DadosHugoNessuna valutazione finora
- EATIC Artes e Expressões-Literacia Informática-QuestionárioDocumento1 paginaEATIC Artes e Expressões-Literacia Informática-QuestionárioAntónio MarquesNessuna valutazione finora
- PDF ClassDocumento3 paginePDF ClassTony GuirrugoNessuna valutazione finora
- Eusouandroid Com Download Picsart Photo Studio Verso AtualizDocumento9 pagineEusouandroid Com Download Picsart Photo Studio Verso Atualizjhean.waggner2014Nessuna valutazione finora
- Regulamento TIM Controle GIGA B Promo Express - Versão FinalDocumento8 pagineRegulamento TIM Controle GIGA B Promo Express - Versão FinalWaldemir JúniorNessuna valutazione finora
- Rede Sem Fio ProjetoDocumento27 pagineRede Sem Fio ProjetoYwandeyNessuna valutazione finora
- Anexo I - Termo de Requisição de Aparelho CelularDocumento6 pagineAnexo I - Termo de Requisição de Aparelho CelularandrelmacedoNessuna valutazione finora
- Utilizando o WINMFD 2Documento2 pagineUtilizando o WINMFD 2reneemouraNessuna valutazione finora
- Ata de Registro de Preços - Hospital UniversitárioDocumento57 pagineAta de Registro de Preços - Hospital UniversitáriogillieryNessuna valutazione finora
- Apresentação Ronni Aurora VisionDocumento14 pagineApresentação Ronni Aurora VisiondutrafaissalNessuna valutazione finora
- Periféricos de EntradaDocumento4 paginePeriféricos de EntradasantosleilaNessuna valutazione finora
- Manual Receiver Sony STR De885Documento68 pagineManual Receiver Sony STR De885Reilton Azeredo100% (4)