Potrebbero piacerti anche
- Computer Architecture and Data Manipulation: - A Central Processing Unit (CPU)Documento16 pagineComputer Architecture and Data Manipulation: - A Central Processing Unit (CPU)Kiran KumarNessuna valutazione finora
- Topic 1.1 Systems ArchitectureDocumento26 pagineTopic 1.1 Systems ArchitectureduncanNessuna valutazione finora
- Kiến Trúc Máy Tính CS2009: Khoa Khoa học và Kỹ thuật Máy tính BM Kỹ thuật Máy tính Võ Tấn PhươngDocumento50 pagineKiến Trúc Máy Tính CS2009: Khoa Khoa học và Kỹ thuật Máy tính BM Kỹ thuật Máy tính Võ Tấn Phươngthanhlinh9191Nessuna valutazione finora
- Unified Model IO Server Paul SelwoodDocumento23 pagineUnified Model IO Server Paul SelwoodprasannanayakNessuna valutazione finora
- Chapter08 PDFDocumento49 pagineChapter08 PDFQuý Nguyễn QuangNessuna valutazione finora
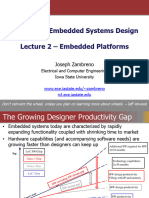
- L03 Embedded 22Documento11 pagineL03 Embedded 22kingNessuna valutazione finora
- Designing A Supply in Five Simple Steps With LtpowercadDocumento15 pagineDesigning A Supply in Five Simple Steps With LtpowercadkalimbaloNessuna valutazione finora
- Convergence of Parallel Architectures: CS 258, Spring 99 David E. Culler Computer Science Division U.C. BerkeleyDocumento25 pagineConvergence of Parallel Architectures: CS 258, Spring 99 David E. Culler Computer Science Division U.C. BerkeleyMurali SrinivasaiahNessuna valutazione finora
- Neptun 1Documento79 pagineNeptun 1mohsengsmNessuna valutazione finora
- STAR-CCM+v4.02training Rev3Documento351 pagineSTAR-CCM+v4.02training Rev3CvijetinTodorovic100% (1)
- Lect 03Documento45 pagineLect 03LOUIS SEVERINO ROMANONessuna valutazione finora
- Chapter 1 The AVR Microcontroller and Embedded Systems Using Assembly and CDocumento32 pagineChapter 1 The AVR Microcontroller and Embedded Systems Using Assembly and Chobbes002100% (4)
- 00 - Helpful - Course - Tips EBO2022 - May2022 - v02 - HANDOUTDocumento7 pagine00 - Helpful - Course - Tips EBO2022 - May2022 - v02 - HANDOUTWalter BarbaNessuna valutazione finora
- Chap 1302 - AkDocumento40 pagineChap 1302 - Akali.khdour06Nessuna valutazione finora
- Tutorial PLEXOSDocumento42 pagineTutorial PLEXOSLuis Angel Cuevas OrtegaNessuna valutazione finora
- CCE2008 Why We Chose HP-UXDocumento57 pagineCCE2008 Why We Chose HP-UXdharmareddyrNessuna valutazione finora
- ECE468 Computer Organization and Architecture I/O Systems: Direct Mapped, N-Way Set AssociativeDocumento30 pagineECE468 Computer Organization and Architecture I/O Systems: Direct Mapped, N-Way Set Associativepand09Nessuna valutazione finora
- VP13 1 IO-WizardDocumento15 pagineVP13 1 IO-WizardinigofetNessuna valutazione finora
- Ca06 2014 PDFDocumento53 pagineCa06 2014 PDFPance CvetkovskiNessuna valutazione finora
- What's New in KINGDOM Version 8.3Documento34 pagineWhat's New in KINGDOM Version 8.3omair.latifNessuna valutazione finora
- ESD-Ch5 2016 PDFDocumento44 pagineESD-Ch5 2016 PDFngoc an nguyenNessuna valutazione finora
- Chapter 4Documento73 pagineChapter 4Phú Quốc PhạmNessuna valutazione finora
- Instruction Set ArchitecturesDocumento69 pagineInstruction Set ArchitecturesSubhajit BhattacharyyaNessuna valutazione finora
- BD2524 Media ConverterDocumento133 pagineBD2524 Media Convertergh05tNessuna valutazione finora
- Unit ObjectivesDocumento14 pagineUnit Objectivesadria777Nessuna valutazione finora
- Chöông 1 Moâ Hình Heä Thoáng Duøng VI Xöû Lyù: ©2009, CE DepartmentDocumento28 pagineChöông 1 Moâ Hình Heä Thoáng Duøng VI Xöû Lyù: ©2009, CE DepartmentTuyet NhiNessuna valutazione finora
- 15 CM OverviewDocumento31 pagine15 CM Overviewmoustafa.aymanNessuna valutazione finora
- Performance Tips and Tricks With ABLDocumento23 paginePerformance Tips and Tricks With ABLJulio Cuevas CasanovaNessuna valutazione finora
- NCM-301 Network Troubleshooting Tools and Techniques - Final 1Documento117 pagineNCM-301 Network Troubleshooting Tools and Techniques - Final 1crystip1Nessuna valutazione finora
- Chapter 5: Overview of Query ProcessingDocumento18 pagineChapter 5: Overview of Query ProcessingAnurag UpadhyayNessuna valutazione finora
- CISCO Networkers 2003 - Deploying MPLS-VPN PDFDocumento48 pagineCISCO Networkers 2003 - Deploying MPLS-VPN PDFAgung Wahyu ariantoNessuna valutazione finora
- CIM UG Genval Panel SessionDocumento17 pagineCIM UG Genval Panel SessionalimaghamiNessuna valutazione finora
- Vasudev DanaitDocumento5 pagineVasudev DanaitShiva Kumar H MNessuna valutazione finora
- CH7-Parallel and Pipelined ProcessingDocumento23 pagineCH7-Parallel and Pipelined Processingaashifr469Nessuna valutazione finora
- RTL Design RTL OverviewDocumento8 pagineRTL Design RTL Overviewwallace20071Nessuna valutazione finora
- Media Gateway O&MDocumento34 pagineMedia Gateway O&Mrashid064018Nessuna valutazione finora
- 08 Trends May2022 v02 HANDOUTDocumento8 pagine08 Trends May2022 v02 HANDOUTWalter BarbaNessuna valutazione finora
- ARM PipeliningDocumento43 pagineARM PipeliningGurram KishoreNessuna valutazione finora
- HardwareDocumento22 pagineHardwareFachrurroziAsNessuna valutazione finora
- Instruction Sets - Appendix B Operand StorageDocumento14 pagineInstruction Sets - Appendix B Operand StorageAnand GandhiNessuna valutazione finora
- WINSEM2021-22 SWE1005 TH VL2021220500498 Reference Material I 11-01-2022 Module I Part II Instruction Format and Addressing ModeDocumento71 pagineWINSEM2021-22 SWE1005 TH VL2021220500498 Reference Material I 11-01-2022 Module I Part II Instruction Format and Addressing Modeann lynnNessuna valutazione finora
- Research at Northeastern University: - I/O Storage Modeling and PerformanceDocumento41 pagineResearch at Northeastern University: - I/O Storage Modeling and PerformanceMich AyisiNessuna valutazione finora
- Soc M2 Ip (2734)Documento18 pagineSoc M2 Ip (2734)Mohamed Jassem McharekNessuna valutazione finora
- VOD ConferenceDocumento15 pagineVOD ConferenceCARLOS OSIEL SEBASTIÁN VALDÉSNessuna valutazione finora
- ESD-Ch5 2022Documento44 pagineESD-Ch5 2022Tú Phan Lê TuấnNessuna valutazione finora
- COA Class 20Documento20 pagineCOA Class 20TANUJ SINGALNessuna valutazione finora
- 42 POWER8 Enterprise E870 From ExperienceDocumento63 pagine42 POWER8 Enterprise E870 From ExperienceAntonio A. Bonita100% (1)
- IT1204 Section 04 Latest PDFDocumento159 pagineIT1204 Section 04 Latest PDFKavishka HimashanaNessuna valutazione finora
- Computer Architecture Note by Redwan (UptoMemorySystem)Documento64 pagineComputer Architecture Note by Redwan (UptoMemorySystem)Tabassum Reza100% (1)
- Assignment: 1. What Are The Methods For Line Balancing? Give Related ExamplesDocumento13 pagineAssignment: 1. What Are The Methods For Line Balancing? Give Related ExamplesGP GILLNessuna valutazione finora
- AppendixA LogicDesignBasicsDocumento180 pagineAppendixA LogicDesignBasicsvl coderNessuna valutazione finora
- Research at Northeastern University: - I/O Storage Modeling and PerformanceDocumento41 pagineResearch at Northeastern University: - I/O Storage Modeling and Performancejatla143Nessuna valutazione finora
- I/O Processor-8089: By, S. Angel Deborah Ap/CseDocumento16 pagineI/O Processor-8089: By, S. Angel Deborah Ap/CseBinkyNessuna valutazione finora
- Lecture - 05 - Network Traffic MeasurementDocumento24 pagineLecture - 05 - Network Traffic MeasurementNguyễn ViệtNessuna valutazione finora
- Mapping&MuxingDocumento23 pagineMapping&MuxingVijay KumarNessuna valutazione finora
- Productizing and Deploying The Openairinterface Epc: Spencer Sevilla, Kurtis HeimerlDocumento36 pagineProductizing and Deploying The Openairinterface Epc: Spencer Sevilla, Kurtis HeimerlSaidNessuna valutazione finora
- Embedded System Design (BEE-446) : General-Purpose Processors (Software)Documento12 pagineEmbedded System Design (BEE-446) : General-Purpose Processors (Software)Humna KhanNessuna valutazione finora
- Module 4 - Data Domain Advanced Features and Functions - v5Documento67 pagineModule 4 - Data Domain Advanced Features and Functions - v5ilayaraja21Nessuna valutazione finora
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Da EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Nessuna valutazione finora
- Token Ring Technology ReportDa EverandToken Ring Technology ReportNessuna valutazione finora
- BAIWEBDYNPRO1Documento1 paginaBAIWEBDYNPRO1thanhlinh9191Nessuna valutazione finora
- Tutorial Week09Documento7 pagineTutorial Week09thanhlinh9191Nessuna valutazione finora
- BAIWEBDYNPRO2Documento5 pagineBAIWEBDYNPRO2thanhlinh9191Nessuna valutazione finora
- BAIWEBDYNPRODocumento7 pagineBAIWEBDYNPROthanhlinh9191Nessuna valutazione finora
- Pss Koynov Black MukticrystallineDocumento3 paginePss Koynov Black Mukticrystallinethanhlinh9191Nessuna valutazione finora
- PVFeedstockCost 5YearOutlookDocumento8 paginePVFeedstockCost 5YearOutlookthanhlinh9191Nessuna valutazione finora
- LECTURE 2 - Crystalline Silicon Solar CellsDocumento2 pagineLECTURE 2 - Crystalline Silicon Solar Cellsthanhlinh9191Nessuna valutazione finora
- CompozitDocumento6 pagineCompozitthanhlinh9191Nessuna valutazione finora
- BPSolarSidhu - 4 13 2010Documento50 pagineBPSolarSidhu - 4 13 2010thanhlinh9191Nessuna valutazione finora
- A Crystalline Silicon Solar Cell VisionDocumento22 pagineA Crystalline Silicon Solar Cell Visionthanhlinh9191Nessuna valutazione finora
- Crystalline Silicon Solar Cells With Selective Emitter and The .Documento11 pagineCrystalline Silicon Solar Cells With Selective Emitter and The .thanhlinh9191Nessuna valutazione finora
- Crystalline-Silicon Solar Cells For The 21st CenturyDocumento11 pagineCrystalline-Silicon Solar Cells For The 21st Centurythanhlinh9191Nessuna valutazione finora
- SCHEMATIC3 AVRProgrammerDocumento1 paginaSCHEMATIC3 AVRProgrammerthanhlinh9191Nessuna valutazione finora
- Nanotech Hdbook III 10Documento2 pagineNanotech Hdbook III 10thanhlinh9191Nessuna valutazione finora
- SCHEMATIC2 LedDriverDocumento1 paginaSCHEMATIC2 LedDriverthanhlinh9191100% (1)
- SCHEMATIC1 PowerSourceDocumento1 paginaSCHEMATIC1 PowerSourcethanhlinh9191Nessuna valutazione finora
- Kien Truc May Tinh Chapter 2Documento96 pagineKien Truc May Tinh Chapter 2shindonogoNessuna valutazione finora
- Kiến Trúc Máy Tính CS2009: Khoa Khoa học và Kỹ thuật Máy tính BM Kỹ thuật Máy tính Võ Tấn PhươngDocumento77 pagineKiến Trúc Máy Tính CS2009: Khoa Khoa học và Kỹ thuật Máy tính BM Kỹ thuật Máy tính Võ Tấn Phươngthanhlinh9191Nessuna valutazione finora
- ĐÁP ÁN ĐỀ THI ĐẠI HỌC MÔN HÓA KHỐI A 2008Documento2 pagineĐÁP ÁN ĐỀ THI ĐẠI HỌC MÔN HÓA KHỐI A 2008ha100% (2)
- ĐÁP ÁN ĐỀ THI ĐẠI HỌC MÔN HÓA KHỐI A 2008Documento2 pagineĐÁP ÁN ĐỀ THI ĐẠI HỌC MÔN HÓA KHỐI A 2008ha100% (2)
- Kien Truc May Tinh Chapter 1Documento50 pagineKien Truc May Tinh Chapter 1shindonogoNessuna valutazione finora
- e-ChipTHTTT 211 Tech24.vnDocumento47 paginee-ChipTHTTT 211 Tech24.vnthanhlinh9191Nessuna valutazione finora
- C Programming On LinuxDocumento18 pagineC Programming On LinuxRahi Jain100% (2)
- I Will Create Business Powerpoint Presentation DesignDocumento9 pagineI Will Create Business Powerpoint Presentation DesignAbdullah HafidNessuna valutazione finora
- Ndbu Card en - Neta - 01 - Um - G PDFDocumento104 pagineNdbu Card en - Neta - 01 - Um - G PDFshekhar yadavNessuna valutazione finora
- Soal Us Bhs - Ing Kelas Xii Genap-Paket ADocumento9 pagineSoal Us Bhs - Ing Kelas Xii Genap-Paket ATrianita Syanata MadjidNessuna valutazione finora
- Gaminator 5 in 1Documento17 pagineGaminator 5 in 1Jose El Pepe Arias0% (1)
- Umar Bala Com115 AssDocumento6 pagineUmar Bala Com115 AssSOMOSCONessuna valutazione finora
- Variants of LINUXDocumento7 pagineVariants of LINUXJake SullyNessuna valutazione finora
- Java SwingDocumento79 pagineJava Swingprafullmathur28100% (1)
- Discoverer10g AdministrationDocumento51 pagineDiscoverer10g Administrationapi-27048744Nessuna valutazione finora
- SR-5000 Script Reference - EDocumento24 pagineSR-5000 Script Reference - EDomagoj ZagoracNessuna valutazione finora
- Firmware - WikipediaDocumento3 pagineFirmware - WikipediaselbalNessuna valutazione finora
- Online FurnitureDocumento31 pagineOnline FurnitureBelal AhmedNessuna valutazione finora
- Microsoft Planner GuideDocumento18 pagineMicrosoft Planner Guidedmtrung834340Nessuna valutazione finora
- Lab 10 Blocking Threats Using Custom ApplicationsDocumento29 pagineLab 10 Blocking Threats Using Custom ApplicationsAnkita SinghNessuna valutazione finora
- Seminar - Sty: AL TEX Style For Slides and Notes User's GuideDocumento45 pagineSeminar - Sty: AL TEX Style For Slides and Notes User's GuideNPNessuna valutazione finora
- Basic 3G Performance and Statistic AnalysisDocumento25 pagineBasic 3G Performance and Statistic AnalysisRZ100% (1)
- Impact Echo: Product Brochure NDT EquipmentDocumento2 pagineImpact Echo: Product Brochure NDT EquipmentDilhara WickramaarachchiNessuna valutazione finora
- Webfocus Web Services Version 5 Release 3Documento278 pagineWebfocus Web Services Version 5 Release 3Nico VondegrachtNessuna valutazione finora
- Relief Valve From HysysDocumento8 pagineRelief Valve From Hysysarmin100% (1)
- VCS-279.examcollection - Premium.exam.89q HLNTGXN PDFDocumento31 pagineVCS-279.examcollection - Premium.exam.89q HLNTGXN PDFkhursheed4u3590Nessuna valutazione finora
- Topics: Access Modifiers in JavaDocumento14 pagineTopics: Access Modifiers in JavaShubhankar SinghNessuna valutazione finora
- Using Arcgis Desktop9Documento442 pagineUsing Arcgis Desktop9Alfian Yuliarto Diwangsa100% (2)
- Accuracy AssesmentDocumento9 pagineAccuracy Assesmentarun sahniNessuna valutazione finora
- Create Vista GadgetDocumento4 pagineCreate Vista GadgetDexto100% (1)
- SFOS 19.0.0 GA-Build317Documento4 pagineSFOS 19.0.0 GA-Build317malleshNessuna valutazione finora
- Sappress Sap Governance Risk and Compliance PDFDocumento33 pagineSappress Sap Governance Risk and Compliance PDFPrince McGershonNessuna valutazione finora
- .Car Black Box System For Accident Prediction and Crash RecoveryDocumento7 pagine.Car Black Box System For Accident Prediction and Crash RecoveryFakhir GoharNessuna valutazione finora
- FYBSC - AnimationDocumento22 pagineFYBSC - AnimationSitanshu BhartiyaNessuna valutazione finora
- EE313 Lab 2Documento6 pagineEE313 Lab 2Alvish NaiduNessuna valutazione finora
- Bike Write-UpDocumento20 pagineBike Write-UpUserNessuna valutazione finora
- Case Study Auto Insurance Claims: 2.1 NotificationDocumento11 pagineCase Study Auto Insurance Claims: 2.1 NotificationGiridharan_Kum_164Nessuna valutazione finora