Potrebbero piacerti anche
- Perturbative Analysis On Infrared and Ultraviolet Aspects of Noncommutative QED On RDocumento18 paginePerturbative Analysis On Infrared and Ultraviolet Aspects of Noncommutative QED On RmlmilleratmitNessuna valutazione finora
- Perturbative Analysis On Infrared Aspects of Noncommutative QED On RDocumento10 paginePerturbative Analysis On Infrared Aspects of Noncommutative QED On RmlmilleratmitNessuna valutazione finora
- 1401-Ab Initio Calculation Iph En-015Documento6 pagine1401-Ab Initio Calculation Iph En-015majid ghand chiNessuna valutazione finora
- Yang 2014Documento4 pagineYang 2014bahador bahadoripourNessuna valutazione finora
- The Vector Potential of A Point Magnetic DipoleDocumento18 pagineThe Vector Potential of A Point Magnetic DipoleAgtc TandayNessuna valutazione finora
- The Su (2) Spin S Representations Via CP Sigma ModelsDocumento17 pagineThe Su (2) Spin S Representations Via CP Sigma ModelsOng JooHomNessuna valutazione finora
- Electromagnetism V: Induction: 1 Motional EMFDocumento20 pagineElectromagnetism V: Induction: 1 Motional EMFRandomNessuna valutazione finora
- Xart11 PDFDocumento10 pagineXart11 PDFJose DoriaNessuna valutazione finora
- First Principles Theory of The EPR G-Tensor in Solids: Defects in QuartzDocumento5 pagineFirst Principles Theory of The EPR G-Tensor in Solids: Defects in Quartzfghsda123000Nessuna valutazione finora
- Non-Equilibrium Green's Function Calculation of Optical Absorption in Nano Optoelectronic DevicesDocumento4 pagineNon-Equilibrium Green's Function Calculation of Optical Absorption in Nano Optoelectronic DevicesOka Kurniawan100% (2)
- 2006 - (Mirza, Zarei) Aharonov-Casher Effect For Spin One Particles in A Noncommutative SpaceDocumento9 pagine2006 - (Mirza, Zarei) Aharonov-Casher Effect For Spin One Particles in A Noncommutative Spacefaudzi5505Nessuna valutazione finora
- Electrodynamics-Point ParticlesDocumento15 pagineElectrodynamics-Point ParticlesIrvin MartinezNessuna valutazione finora
- Multifunctional SensorDocumento25 pagineMultifunctional SensorOrazio GarofaloNessuna valutazione finora
- Article2 PDFDocumento27 pagineArticle2 PDFOmar Andres Castaño IdarragaNessuna valutazione finora
- Spin OrbitDocumento19 pagineSpin OrbitNitromechNessuna valutazione finora
- Zen The Path of Paradox Vol 1Documento5 pagineZen The Path of Paradox Vol 1Rigved SharmaNessuna valutazione finora
- Modelling and Identification of A Non-Linear Saturated Magnetic Circuit: Theoretical Study and Experimental ResultsDocumento14 pagineModelling and Identification of A Non-Linear Saturated Magnetic Circuit: Theoretical Study and Experimental ResultsGustavo LimaNessuna valutazione finora
- Advanced Beam Dynamics & Hamiltonian Formalism: Rick Baartman, TRIUMF February 3, 2015Documento28 pagineAdvanced Beam Dynamics & Hamiltonian Formalism: Rick Baartman, TRIUMF February 3, 2015s gNessuna valutazione finora
- Jiles-Atherton Magnetic Hysteresis Parameters IdentificationDocumento6 pagineJiles-Atherton Magnetic Hysteresis Parameters IdentificationAhmed Magdy BeshrNessuna valutazione finora
- Hall Effect: Prateek Chauhan M.SC Physics Roll No-16510054 Prateek - Chauhan@iitgn - Ac.in Jan 31,2017Documento9 pagineHall Effect: Prateek Chauhan M.SC Physics Roll No-16510054 Prateek - Chauhan@iitgn - Ac.in Jan 31,2017Prateek ChauhanNessuna valutazione finora
- Hall Effect: Prateek Chauhan M.SC Physics Roll No-16510054 Prateek - Chauhan@iitgn - Ac.in Jan 31,2017Documento9 pagineHall Effect: Prateek Chauhan M.SC Physics Roll No-16510054 Prateek - Chauhan@iitgn - Ac.in Jan 31,2017jitendra kumar gurjarNessuna valutazione finora
- Progress in Electromagnetics Research, Vol. 132, 149-158, 2012Documento10 pagineProgress in Electromagnetics Research, Vol. 132, 149-158, 2012程宇凡Nessuna valutazione finora
- Chapter 4: Crystal Lattice DynamicsDocumento40 pagineChapter 4: Crystal Lattice Dynamicsabhinav jangirNessuna valutazione finora
- Study of Magnetoresistance SidDocumento7 pagineStudy of Magnetoresistance SidBhargav TangiralaNessuna valutazione finora
- VACUUM SPPsDocumento4 pagineVACUUM SPPswade.naylorNessuna valutazione finora
- Statistical Mechanics of Logarithmic REM: Duality, Freezing and Extreme Value Statistics of 1/f Noises Generated by Gaussian Free FieldsDocumento26 pagineStatistical Mechanics of Logarithmic REM: Duality, Freezing and Extreme Value Statistics of 1/f Noises Generated by Gaussian Free Fieldsleidy milenaNessuna valutazione finora
- Champ Elect QQD 2014Documento20 pagineChamp Elect QQD 2014hhakim32Nessuna valutazione finora
- Machine Copy For Proofreading, Vol. X, Y-Z, 2004Documento23 pagineMachine Copy For Proofreading, Vol. X, Y-Z, 2004Gathy BrayohNessuna valutazione finora
- BuddDocumento9 pagineBuddM. UmarNessuna valutazione finora
- Anil Asi2011Documento13 pagineAnil Asi2011Pradeep ChauhanNessuna valutazione finora
- 10.1007 s10825-015-0753-6 Final CorrectedDocumento12 pagine10.1007 s10825-015-0753-6 Final CorrectedGennadiyNessuna valutazione finora
- Magnetic Monopoles As Agents of Chiral Symmetry Breaking in U (1) Lattice Gauge TheoryDocumento14 pagineMagnetic Monopoles As Agents of Chiral Symmetry Breaking in U (1) Lattice Gauge TheoryTom_BielefeldNessuna valutazione finora
- Effective and Robust Calculation of Magnetic Force: M. Kosek, T. Mikolanda, A. RichterDocumento18 pagineEffective and Robust Calculation of Magnetic Force: M. Kosek, T. Mikolanda, A. RichtersahandstmNessuna valutazione finora
- Progress in Electromagnetics Research B, Vol. 18, 165-183, 2009Documento19 pagineProgress in Electromagnetics Research B, Vol. 18, 165-183, 2009abednegoNessuna valutazione finora
- The Effect of Confined Phonons On The Absorption Coefficient of A Weak Electromagnetic Wave by Confined Electrons in Doped SuperlatticesDocumento4 pagineThe Effect of Confined Phonons On The Absorption Coefficient of A Weak Electromagnetic Wave by Confined Electrons in Doped SuperlatticesLe HungNessuna valutazione finora
- Ising Model With Hopfield Network: Hemanta Bhattarai Hbhattar@nd - EduDocumento6 pagineIsing Model With Hopfield Network: Hemanta Bhattarai Hbhattar@nd - EduHemanta BhattaraiNessuna valutazione finora
- Introduction MuSRDocumento42 pagineIntroduction MuSRRoberto Salazar100% (1)
- 2IJMCARDEC20182Documento6 pagine2IJMCARDEC20182TJPRC PublicationsNessuna valutazione finora
- Bose-Einstein Condensation Controlled by (HOP+OLP) Trapping PotentialsDocumento5 pagineBose-Einstein Condensation Controlled by (HOP+OLP) Trapping PotentialsIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Permeability Measurement of Ferromagnetic Materials in Microwave Frequency Range Using Support Vector Machine RegressionDocumento10 paginePermeability Measurement of Ferromagnetic Materials in Microwave Frequency Range Using Support Vector Machine Regressionsahil singhNessuna valutazione finora
- Noncommutative Geometry From Strings and Branes: A, B A, B A1Documento20 pagineNoncommutative Geometry From Strings and Branes: A, B A, B A1mlmilleratmitNessuna valutazione finora
- Pendulum Beams - A Window Into The Quantum Pendulum PDFDocumento8 paginePendulum Beams - A Window Into The Quantum Pendulum PDFMs PhysicsNessuna valutazione finora
- Introduction To The Electromagnetic Theory: Andrea Latina (CERN) Andrea - Latina@cern - CHDocumento37 pagineIntroduction To The Electromagnetic Theory: Andrea Latina (CERN) Andrea - Latina@cern - CHMi ChuckNessuna valutazione finora
- 2 Ijaerdjun20172Documento6 pagine2 Ijaerdjun20172TJPRC PublicationsNessuna valutazione finora
- Molecular-Field Approximation For Josephson-Coupled Superconducting ArraysDocumento3 pagineMolecular-Field Approximation For Josephson-Coupled Superconducting ArraysJulhiana VargasNessuna valutazione finora
- Alternative Method To Calculate The Magnetic Field of Permanent Magnets With Azimuthal Symmetry PDFDocumento10 pagineAlternative Method To Calculate The Magnetic Field of Permanent Magnets With Azimuthal Symmetry PDFjames<XIIINessuna valutazione finora
- Russi 2016Documento7 pagineRussi 2016yulliarperezNessuna valutazione finora
- Jiles-Atherton Magnetic Hysteresis Parameters IdenDocumento7 pagineJiles-Atherton Magnetic Hysteresis Parameters IdenBruno GubettaNessuna valutazione finora
- Nuclear Magnetic Resonance: 1 BackgroundDocumento15 pagineNuclear Magnetic Resonance: 1 BackgroundRoy VeseyNessuna valutazione finora
- Magnetic Force Analysis in A Gapped-Core Reactor Model Under Harmonic Magnetizations by Efficient Frequency-Domain DecompositionDocumento2 pagineMagnetic Force Analysis in A Gapped-Core Reactor Model Under Harmonic Magnetizations by Efficient Frequency-Domain DecompositionKiran KarthikNessuna valutazione finora
- Interaction of Electromagnetic Field With A Gravitational Wave in Minkowski and De-Sitter Space-TimeDocumento16 pagineInteraction of Electromagnetic Field With A Gravitational Wave in Minkowski and De-Sitter Space-TimeHimanshu KumarNessuna valutazione finora
- 5 Ijapbcroct20175Documento6 pagine5 Ijapbcroct20175TJPRC PublicationsNessuna valutazione finora
- Z-Transform Electromagnetic Transient Analysis in Power SystemsDocumento9 pagineZ-Transform Electromagnetic Transient Analysis in Power Systemsvims1248993Nessuna valutazione finora
- Electromechanical System Simulation With Models Generated From Finite Element SolutionDocumento4 pagineElectromechanical System Simulation With Models Generated From Finite Element SolutionDimeshNessuna valutazione finora
- The Electron Interaction With The Dirac Delta PulseDocumento13 pagineThe Electron Interaction With The Dirac Delta PulseGerové InvestmentsNessuna valutazione finora
- RubberbandDocumento3 pagineRubberbandMatt MacNessuna valutazione finora
- Electronics 09 01748Documento15 pagineElectronics 09 01748ihab benayacheNessuna valutazione finora
- Bohr-Sommerfeld QuantizationDocumento25 pagineBohr-Sommerfeld QuantizationDr. John BeveridgeNessuna valutazione finora
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsDa EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNessuna valutazione finora
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Da EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Nessuna valutazione finora
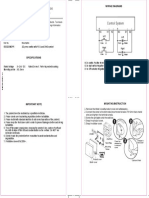
- Control System + +: Left LeftDocumento1 paginaControl System + +: Left LeftKiran KarthikNessuna valutazione finora
- Heat Transfer Equivalent RC ModelDocumento5 pagineHeat Transfer Equivalent RC ModelKiran KarthikNessuna valutazione finora
- EU Declaration of Conformity: Catalog Series DescriptionDocumento1 paginaEU Declaration of Conformity: Catalog Series DescriptionKiran KarthikNessuna valutazione finora
- XCFR8.E145984 - Terminal Blocks Certified For Canada - ComponentDocumento3 pagineXCFR8.E145984 - Terminal Blocks Certified For Canada - ComponentKiran KarthikNessuna valutazione finora
- C3controls Catalog Edition 27 2022 03Documento593 pagineC3controls Catalog Edition 27 2022 03Kiran KarthikNessuna valutazione finora
- 39 MM (1.54 In) : Wtb2-Epw2/4 Outline Dimension DrawingDocumento1 pagina39 MM (1.54 In) : Wtb2-Epw2/4 Outline Dimension DrawingKiran KarthikNessuna valutazione finora
- Leitfaden IEC EN61439 en PDFDocumento40 pagineLeitfaden IEC EN61439 en PDFmansa12Nessuna valutazione finora
- Opale: Printing in Black Colour On Plain White PaperDocumento1 paginaOpale: Printing in Black Colour On Plain White PaperKiran KarthikNessuna valutazione finora
- Night Foot Lamp W PIR Sensor LED: SpecificationsDocumento2 pagineNight Foot Lamp W PIR Sensor LED: SpecificationsKiran KarthikNessuna valutazione finora
- Ampacities and Mechanical Properties of Rectangular Copper Busbars: Table 1. Ampacities of Copper No. 110Documento4 pagineAmpacities and Mechanical Properties of Rectangular Copper Busbars: Table 1. Ampacities of Copper No. 110Kiran KarthikNessuna valutazione finora
- US Sources of Busbar: Ansonia Copper and Brass, IncDocumento2 pagineUS Sources of Busbar: Ansonia Copper and Brass, IncKiran KarthikNessuna valutazione finora
- 3wa Infografik 1 en 9to16 LogoDocumento1 pagina3wa Infografik 1 en 9to16 LogoKiran KarthikNessuna valutazione finora
- Through Technology Perfected by Research: Schneider-Electric - Co.inDocumento2 pagineThrough Technology Perfected by Research: Schneider-Electric - Co.inKiran KarthikNessuna valutazione finora
- The New Standard IEC 61439: Low Voltage Switchgear and Controlgear AssembliesDocumento20 pagineThe New Standard IEC 61439: Low Voltage Switchgear and Controlgear AssembliesAdnen BOUAZIZINessuna valutazione finora
- DK 0011Documento6 pagineDK 0011Kiran KarthikNessuna valutazione finora
- Shelf-Life Evaluation of Aluminuin Electrdytic CapacitcirsDocumento7 pagineShelf-Life Evaluation of Aluminuin Electrdytic CapacitcirsKiran KarthikNessuna valutazione finora
- Core Balance Current Transformer CBCT: FeaturesDocumento1 paginaCore Balance Current Transformer CBCT: FeaturesKiran KarthikNessuna valutazione finora
- 001.McKechnie Aluminium Solutions LTD - Handling and StorageDocumento2 pagine001.McKechnie Aluminium Solutions LTD - Handling and StorageKiran KarthikNessuna valutazione finora
- Storage With Theoretical ExplainationDocumento5 pagineStorage With Theoretical ExplainationKiran KarthikNessuna valutazione finora
- Storage - Instructions - ZF - en - AluminiumDocumento1 paginaStorage - Instructions - ZF - en - AluminiumKiran KarthikNessuna valutazione finora
- Disjuntor SiemenesDocumento15 pagineDisjuntor SiemenesDaviMiattelloRFNessuna valutazione finora
- DK 010Documento64 pagineDK 010Kiran KarthikNessuna valutazione finora
- 3WA Air Circuit Breakers: Integration in Switchgears According To IEC 61439Documento1 pagina3WA Air Circuit Breakers: Integration in Switchgears According To IEC 61439Kiran KarthikNessuna valutazione finora
- Aluminium - Handling, Storage, Maintenance and CleaningDocumento7 pagineAluminium - Handling, Storage, Maintenance and CleaningKiran KarthikNessuna valutazione finora
- Dokumen - Tips Abb Technical Guide No04 RevcDocumento44 pagineDokumen - Tips Abb Technical Guide No04 RevcKiran KarthikNessuna valutazione finora
- GU - Cabine MT BT (EN) - 1VCP000591 1511Documento88 pagineGU - Cabine MT BT (EN) - 1VCP000591 1511Fatmir JashariNessuna valutazione finora
- 3wn6 HB en 9905Documento120 pagine3wn6 HB en 9905Jaqueline RicardoNessuna valutazione finora
- DK 006Documento16 pagineDK 006Kiran KarthikNessuna valutazione finora
- Dokumen - Tips Ge Support Support Services Low Voltage Circuit Breaker Parts 1 High VoltageDocumento41 pagineDokumen - Tips Ge Support Support Services Low Voltage Circuit Breaker Parts 1 High VoltageKiran KarthikNessuna valutazione finora
- Dokumen - Tips Abb Powerpoint Transformer Components Because Reliability Is Everything Vacuum OltcDocumento29 pagineDokumen - Tips Abb Powerpoint Transformer Components Because Reliability Is Everything Vacuum OltcKiran KarthikNessuna valutazione finora
- Relay Maintenance and Testing: BenefitsDocumento2 pagineRelay Maintenance and Testing: BenefitsojoladapoNessuna valutazione finora
- Day 4 - Lesson 15 Tuples: Python Mini-Course University of Oklahoma Department of PsychologyDocumento20 pagineDay 4 - Lesson 15 Tuples: Python Mini-Course University of Oklahoma Department of PsychologyhuseyiNessuna valutazione finora
- Data Mining ConceptsDocumento175 pagineData Mining ConceptsNikolya SmirnoffNessuna valutazione finora
- Microcontroller Based Vehicle Security SystemDocumento67 pagineMicrocontroller Based Vehicle Security Systemlokesh_045Nessuna valutazione finora
- MIL-PRF-85704C Turbin CompressorDocumento31 pagineMIL-PRF-85704C Turbin CompressordesosanNessuna valutazione finora
- TitleDocumento142 pagineTitleAmar PašićNessuna valutazione finora
- Technical Data: Series Allclean AcnpDocumento1 paginaTechnical Data: Series Allclean AcnpBoško IvanovićNessuna valutazione finora
- New Features in IbaPDA v7.1.0Documento39 pagineNew Features in IbaPDA v7.1.0Miguel Ángel Álvarez VázquezNessuna valutazione finora
- Review Skills 1-8Documento1 paginaReview Skills 1-8TegarNessuna valutazione finora
- V. Activities: A. Directions: Do The Activity Below. (20 PTS.) Note: Work On This OfflineDocumento7 pagineV. Activities: A. Directions: Do The Activity Below. (20 PTS.) Note: Work On This OfflineKeith Neomi CruzNessuna valutazione finora
- Various Image Enhancement Techniques-A Critical Review: S.S. Bedi, Rati KhandelwalDocumento5 pagineVarious Image Enhancement Techniques-A Critical Review: S.S. Bedi, Rati KhandelwalArina AndriesNessuna valutazione finora
- CSC:361-Software Engineering: Semester: Fall2020Documento39 pagineCSC:361-Software Engineering: Semester: Fall2020hamsfayyazNessuna valutazione finora
- Atmel 2565 Using The Twi Module As I2c Slave - Applicationnote - Avr311Documento14 pagineAtmel 2565 Using The Twi Module As I2c Slave - Applicationnote - Avr311m3y54mNessuna valutazione finora
- Combined Geo-Scientist (P) Examination 2020 Paper-II (Geophysics)Documento25 pagineCombined Geo-Scientist (P) Examination 2020 Paper-II (Geophysics)OIL INDIANessuna valutazione finora
- X-Plane Mobile ManualDocumento66 pagineX-Plane Mobile ManualRafael MunizNessuna valutazione finora
- 1400 CFM TDocumento3 pagine1400 CFM TmahmadwasiNessuna valutazione finora
- Parts Catalog: Parts - Sales - Service - RestorationsDocumento32 pagineParts Catalog: Parts - Sales - Service - RestorationsJean BelzilNessuna valutazione finora
- Science BDocumento2 pagineScience BIyer JuniorNessuna valutazione finora
- Ex450-5 Technical DrawingDocumento12 pagineEx450-5 Technical DrawingTuan Pham AnhNessuna valutazione finora
- 1 Tail & 2 Tail TestDocumento3 pagine1 Tail & 2 Tail TestNisha AggarwalNessuna valutazione finora
- Acuvim II Profibus Modules Users Manual v1.10Documento36 pagineAcuvim II Profibus Modules Users Manual v1.10kamran719Nessuna valutazione finora
- Exploring Music ContentsDocumento370 pagineExploring Music ContentsRoby SamboraNessuna valutazione finora
- More Practice Multiple ChoiceDocumento3 pagineMore Practice Multiple ChoiceHiNessuna valutazione finora
- DA Savitz - Interpreting Epidemiologic Evidence - Strategies For Study Design and Analysis 2003 PDFDocumento329 pagineDA Savitz - Interpreting Epidemiologic Evidence - Strategies For Study Design and Analysis 2003 PDFrindy_bilhaniNessuna valutazione finora
- Business Analytics Data Analysis and Decision Making 6th Edition Albright Solutions ManualDocumento24 pagineBusiness Analytics Data Analysis and Decision Making 6th Edition Albright Solutions ManualAngelaLewisyqza100% (26)
- 002 Ac Yoke B100-ParkerDocumento2 pagine002 Ac Yoke B100-ParkerNubia BarreraNessuna valutazione finora
- I C Engine LabDocumento3 pagineI C Engine LabDevNessuna valutazione finora
- Spark: Owner's ManualDocumento5 pagineSpark: Owner's Manualjorge medinaNessuna valutazione finora
- Which Is The Best Solid Modelling - Dhyan AcademyDocumento3 pagineWhich Is The Best Solid Modelling - Dhyan Academydhyanacademy engineersNessuna valutazione finora
- Oculus SDK OverviewDocumento47 pagineOculus SDK OverviewparaqueimaNessuna valutazione finora