Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Go Fundamentals Gopher GuidesDocumento1.000 pagineGo Fundamentals Gopher GuidesNikita FeshchunNessuna valutazione finora
- s7-200 SMART System Manual en-US PDFDocumento650 pagines7-200 SMART System Manual en-US PDFdario_es100% (1)
- Pgt106 Lab 8Documento11 paginePgt106 Lab 8DivyaNessuna valutazione finora
- Solution Manual For C How To Program 7 e 7th Edition Paul Deitel Harvey DeitelDocumento24 pagineSolution Manual For C How To Program 7 e 7th Edition Paul Deitel Harvey DeitelMariaHendrickswdkjp100% (81)
- Jntu Kakinada It SyllabusDocumento93 pagineJntu Kakinada It SyllabussambhanimadhubabuNessuna valutazione finora
- Assignment 5: Int X 5, y 10Documento7 pagineAssignment 5: Int X 5, y 10JamesNessuna valutazione finora
- Parcial Satelites 2Documento3 pagineParcial Satelites 2Pedro Luis CarroNessuna valutazione finora
- MATH49111/69111: Scientific Computing: 2nd October 2017Documento37 pagineMATH49111/69111: Scientific Computing: 2nd October 2017Pedro Luis CarroNessuna valutazione finora
- Field Practise: Use of A Garmin Gps 12 Receiver: 1. Introduction: ObjectDocumento3 pagineField Practise: Use of A Garmin Gps 12 Receiver: 1. Introduction: ObjectPedro Luis CarroNessuna valutazione finora
- Kalman Filter A Pplied To GpsDocumento24 pagineKalman Filter A Pplied To GpsPedro Luis CarroNessuna valutazione finora
- LiquidDocumento281 pagineLiquidPedro Luis CarroNessuna valutazione finora
- LiquidDocumento281 pagineLiquidPedro Luis CarroNessuna valutazione finora
- Radio Astronomy SolutionsDocumento8 pagineRadio Astronomy SolutionsPedro Luis CarroNessuna valutazione finora
- Solutions Problem Set 1: Definitions of The Coordinates)Documento8 pagineSolutions Problem Set 1: Definitions of The Coordinates)Pedro Luis CarroNessuna valutazione finora
- Exercise3 RadioA SolutionsDocumento11 pagineExercise3 RadioA SolutionsPedro Luis CarroNessuna valutazione finora
- MATH49111/69111: Scientific Computing: 26th October 2017Documento29 pagineMATH49111/69111: Scientific Computing: 26th October 2017Pedro Luis CarroNessuna valutazione finora
- Radio Astronomy ExercisesDocumento4 pagineRadio Astronomy ExercisesPedro Luis CarroNessuna valutazione finora
- LT-5606 Spread spectrum techniques — Spring 2009 Exercise #4 solutionsDocumento2 pagineLT-5606 Spread spectrum techniques — Spring 2009 Exercise #4 solutionsPedro Luis CarroNessuna valutazione finora
- Exercise 1: Definitions of The Coordinates)Documento3 pagineExercise 1: Definitions of The Coordinates)Pedro Luis CarroNessuna valutazione finora
- Exercise3 RadioAstroDocumento2 pagineExercise3 RadioAstroPedro Luis CarroNessuna valutazione finora
- MATH49111/69111: Scientific Computing: 23rd October 2017Documento16 pagineMATH49111/69111: Scientific Computing: 23rd October 2017Pedro Luis CarroNessuna valutazione finora
- MATH49111/69111: Scientific Computing: 5th October 2016Documento18 pagineMATH49111/69111: Scientific Computing: 5th October 2016Pedro Luis CarroNessuna valutazione finora
- TLT5606 Matlab4Documento1 paginaTLT5606 Matlab4Pedro Luis CarroNessuna valutazione finora
- E (HN, Hi) 0 and E (HN, HiDocumento1 paginaE (HN, Hi) 0 and E (HN, HiPedro Luis CarroNessuna valutazione finora
- TLT5606 ProjectsDocumento3 pagineTLT5606 ProjectsPedro Luis CarroNessuna valutazione finora
- TLT5606 Matlab2Documento2 pagineTLT5606 Matlab2Pedro Luis CarroNessuna valutazione finora
- Multi Point A PXDocumento18 pagineMulti Point A PXPedro Luis CarroNessuna valutazione finora
- TLT5606 Ex5Documento1 paginaTLT5606 Ex5Pedro Luis CarroNessuna valutazione finora
- TLT5606 Matlab1Documento1 paginaTLT5606 Matlab1Pedro Luis CarroNessuna valutazione finora
- 00894777Documento4 pagine00894777Pedro Luis CarroNessuna valutazione finora
- The GPS Toolkit - An Open Source GPS Software LibraryDocumento9 pagineThe GPS Toolkit - An Open Source GPS Software LibraryalextronNessuna valutazione finora
- Salazar D Paper Semana Geomatica PDFDocumento12 pagineSalazar D Paper Semana Geomatica PDFPedro Luis CarroNessuna valutazione finora
- Mimo1 Ss SlidesDocumento19 pagineMimo1 Ss SlidesPedro Luis CarroNessuna valutazione finora
- MAT-45806/7 Mathematics for PositioningDocumento63 pagineMAT-45806/7 Mathematics for PositioningPedro Luis CarroNessuna valutazione finora
- DOA Estimation SlidesDocumento92 pagineDOA Estimation SlidesPedro Luis CarroNessuna valutazione finora
- Basic Stack Operations: PUSH and POPDocumento3 pagineBasic Stack Operations: PUSH and POPذیشان چودھریNessuna valutazione finora
- Interview QuestionsDocumento12 pagineInterview QuestionsFenil DesaiNessuna valutazione finora
- Laboratory SessionsDocumento70 pagineLaboratory Sessionsint0Nessuna valutazione finora
- Allen Bradley OS 9 Technical ManualDocumento350 pagineAllen Bradley OS 9 Technical ManualscribdblowschunksNessuna valutazione finora
- Assessment 2: Implement A Stack Using Queuee CodeDocumento41 pagineAssessment 2: Implement A Stack Using Queuee CodeVishal MishraNessuna valutazione finora
- (Computer Application)Documento81 pagine(Computer Application)Arun KumarNessuna valutazione finora
- Open Architecture Handbook - The Borland Developer's Technical GuideDocumento182 pagineOpen Architecture Handbook - The Borland Developer's Technical Guidestk.stoyanovNessuna valutazione finora
- Visvesvaraya Technological University, Belagavi.: Prepared by Mr. Gururaj R.PatwariDocumento30 pagineVisvesvaraya Technological University, Belagavi.: Prepared by Mr. Gururaj R.PatwariitengnareshNessuna valutazione finora
- Object-Oriented Programming Using C++: Third EditionDocumento33 pagineObject-Oriented Programming Using C++: Third EditionAnshuman DwivediNessuna valutazione finora
- BD61 Interview QuestionsDocumento13 pagineBD61 Interview QuestionsAmarnath ReddyNessuna valutazione finora
- CSE 112 Lab ManualDocumento16 pagineCSE 112 Lab ManualAnisha BhowmickNessuna valutazione finora
- Strings 2Documento8 pagineStrings 2SRAVANTHI SALLARAMNessuna valutazione finora
- Multiple Choice Questions: Unit 1 Short Answer QuestionsDocumento17 pagineMultiple Choice Questions: Unit 1 Short Answer QuestionsJyotsna SuraydevaraNessuna valutazione finora
- Organizer Program for DHA Suffa UniversityDocumento5 pagineOrganizer Program for DHA Suffa UniversitykarrarNessuna valutazione finora
- Function Sequence Table (FST) User Manual: Form Number A4625Documento72 pagineFunction Sequence Table (FST) User Manual: Form Number A4625Saadullah Siddiqui100% (1)
- Unit ViDocumento32 pagineUnit VirambabudugyaniNessuna valutazione finora
- C++ Set Question 4 (MM 6)Documento14 pagineC++ Set Question 4 (MM 6)AdNessuna valutazione finora
- Introducing The Motorola HC908 MicrocontrollerDocumento26 pagineIntroducing The Motorola HC908 Microcontrollervinicius.camattaNessuna valutazione finora
- Learning To Program With Haiku Lesson 18Documento7 pagineLearning To Program With Haiku Lesson 18boromilNessuna valutazione finora
- Software Safety Standards and Guidelines: (Herrmann, 3.2)Documento49 pagineSoftware Safety Standards and Guidelines: (Herrmann, 3.2)Aurangzaib JahangirNessuna valutazione finora
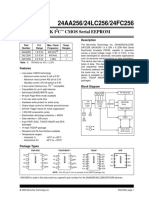
- EEPROM 24LC256 - Microchip PDFDocumento28 pagineEEPROM 24LC256 - Microchip PDFValdir DerlannNessuna valutazione finora
- Evolution of The WAM:: Introduction To Prolog Implementation: The Warren Abstract Machine (WAM)Documento21 pagineEvolution of The WAM:: Introduction To Prolog Implementation: The Warren Abstract Machine (WAM)mcmcsotoNessuna valutazione finora
- RVCT20 Errors and WarningsDocumento97 pagineRVCT20 Errors and WarningsDiegoCSouzaNessuna valutazione finora
- 1.2.1 M.SC App 21-22Documento98 pagine1.2.1 M.SC App 21-22Sridhar SharmaNessuna valutazione finora