Potrebbero piacerti anche
- OxigenoterapiaDocumento11 pagineOxigenoterapiaAlfonso Flores Rodriguez.Nessuna valutazione finora
- Transporte glucosa levaduras IPNDocumento6 pagineTransporte glucosa levaduras IPNdave117300% (2)
- Corazón Cordero Anatomía Interna ExternaDocumento4 pagineCorazón Cordero Anatomía Interna ExternaKelseyPerezNessuna valutazione finora
- Diseño de Terapia de Electroestimulación para Favorecer Procesos de Cicatrización en Ulceras de Pie Diabético Mediante Uso de Corrientes GalvánicasDocumento9 pagineDiseño de Terapia de Electroestimulación para Favorecer Procesos de Cicatrización en Ulceras de Pie Diabético Mediante Uso de Corrientes GalvánicasJuan Sebastian Tirado RomeroNessuna valutazione finora
- Compromiso Del EstudianteDocumento1 paginaCompromiso Del EstudianteMARCOS ANGHELO PUYCAN ESPINOZANessuna valutazione finora
- Cerebelo y Médula EspinalDocumento55 pagineCerebelo y Médula EspinalOrianna MarinNessuna valutazione finora
- FaringeDocumento24 pagineFaringeEdwin CaliNessuna valutazione finora
- Tsa 9 HistoDocumento2 pagineTsa 9 HistoDanae Nikoll Perez DazaNessuna valutazione finora
- Guion Artritis ReumatoideDocumento11 pagineGuion Artritis ReumatoideCarlosSonoNessuna valutazione finora
- Tuberculosis causas síntomasDocumento2 pagineTuberculosis causas síntomasFotocopias LumaNessuna valutazione finora
- Bacilos GramnegativosDocumento13 pagineBacilos GramnegativosJANET NEYRA PEÑANessuna valutazione finora
- Anatomía sistema respiratorioDocumento30 pagineAnatomía sistema respiratorioyoglen100% (1)
- Caso Clinico de EscalasDocumento13 pagineCaso Clinico de EscalasErick Luyo JaramilloNessuna valutazione finora
- 1.tubo y Medula Mapa ConceptualDocumento4 pagine1.tubo y Medula Mapa ConceptualGineth Lopez HernandezNessuna valutazione finora
- Caracteristicas de Tipos de PelvisDocumento13 pagineCaracteristicas de Tipos de PelvisISABEL DEBORAH PORRAS MOTTANessuna valutazione finora
- Lobo de Río - PNMDocumento22 pagineLobo de Río - PNMIrene Sayago SilvaNessuna valutazione finora
- Músculos Miembro SuperiorDocumento11 pagineMúsculos Miembro SuperiorKevin CruzNessuna valutazione finora
- Extracción de sangre venosaDocumento31 pagineExtracción de sangre venosaMsaraftNessuna valutazione finora
- Anatomía y patología de párpados, orbita, conjuntiva y corneaDocumento13 pagineAnatomía y patología de párpados, orbita, conjuntiva y corneaMarisela Colina TovarNessuna valutazione finora
- Guia Práctica Sesión 7 EyFH1 Grupo6Documento6 pagineGuia Práctica Sesión 7 EyFH1 Grupo6BRIGHITTE LUCANA TERRONESNessuna valutazione finora
- Investigación FormativaDocumento2 pagineInvestigación FormativaJc GonzaNessuna valutazione finora
- Semana 6 InyectoterapiaDocumento67 pagineSemana 6 InyectoterapiaJOA50% (2)
- SISTEMA RESPIRATORIO JaviDocumento5 pagineSISTEMA RESPIRATORIO Javikatherine cordovaNessuna valutazione finora
- Tabla Musculos MS NetterDocumento6 pagineTabla Musculos MS NetterSol VillalbaNessuna valutazione finora
- Labio LeporinoDocumento5 pagineLabio Leporinoelio yzarra100% (1)
- Examen Fisico Del Sistema NerviosoDocumento39 pagineExamen Fisico Del Sistema NerviosoLuz minervaNessuna valutazione finora
- Nº6 Teoría Genética Resuelto Semana 6 UpaoDocumento7 pagineNº6 Teoría Genética Resuelto Semana 6 UpaoMaría Gracia MachadoNessuna valutazione finora
- Mapa Mental - Correcto Calzado de Guantes Ochoa Gonzales GiulianaDocumento2 pagineMapa Mental - Correcto Calzado de Guantes Ochoa Gonzales GiulianagiulianaNessuna valutazione finora
- Principios de Asepsia Quirurgica y Atencion PrehospitalariaDocumento15 paginePrincipios de Asepsia Quirurgica y Atencion PrehospitalariaBerenice Calero100% (1)
- COLGAJODocumento5 pagineCOLGAJOromanticnatoNessuna valutazione finora
- Historia de las plantas medicinales a través de los tiemposDocumento60 pagineHistoria de las plantas medicinales a través de los tiemposJorge Luis Plasencia CubaNessuna valutazione finora
- Cómo Puedo Entusiasmarme Con Mis EstudiosDocumento4 pagineCómo Puedo Entusiasmarme Con Mis EstudiosCarlos Alexis Puicon HuamanNessuna valutazione finora
- Proyecto Final... Tesis 2017Documento27 pagineProyecto Final... Tesis 2017henryNessuna valutazione finora
- Wa0337Documento25 pagineWa0337Vanessa JuradoNessuna valutazione finora
- Terminologia MedicaDocumento3 pagineTerminologia MedicaAlexander Coiza MartinezNessuna valutazione finora
- Cefalea. Síndrome MeníngeoDocumento9 pagineCefalea. Síndrome MeníngeoOlaf FrozenNessuna valutazione finora
- Fisiologia Practica 2 SapoDocumento6 pagineFisiologia Practica 2 SapoQ Aguero Jhann HNessuna valutazione finora
- El Mal Uso Del Internet en Los Adolescentes de La Ciudad de Piura, 2023Documento5 pagineEl Mal Uso Del Internet en Los Adolescentes de La Ciudad de Piura, 2023KARLA MARITTA AGUILAR CEVALLOSNessuna valutazione finora
- EDEMADocumento1 paginaEDEMAAndrea Angulo PerezNessuna valutazione finora
- Derivados de La Capa Germinativa EctodérmicaDocumento10 pagineDerivados de La Capa Germinativa EctodérmicaCamilo LunaNessuna valutazione finora
- Semiología de La Piel y FanerasDocumento3 pagineSemiología de La Piel y FanerasTEDMAR JUAN TORRES NAVARRONessuna valutazione finora
- Triptico El ColeraDocumento2 pagineTriptico El Coleraalbianny100% (1)
- Mapa Conceptual Tema 12 Cerebelo PDFDocumento1 paginaMapa Conceptual Tema 12 Cerebelo PDFKilostick 022100% (1)
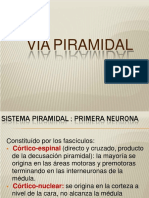
- Sistema piramidal: vía motora y alteracionesDocumento36 pagineSistema piramidal: vía motora y alteracionesEdwin Calle100% (1)
- Preguntas Grupo 5Documento3 paginePreguntas Grupo 5CamilaNessuna valutazione finora
- Examen del cuello: estructuras y procedimientoDocumento31 pagineExamen del cuello: estructuras y procedimientojofia100% (1)
- Velasquez Suyon PAF RSDocumento29 pagineVelasquez Suyon PAF RSNorwel Velasquez suyonNessuna valutazione finora
- A Guia de Practica BiologiaDocumento9 pagineA Guia de Practica BiologiaANGEL EDU RAMOS SILVANessuna valutazione finora
- Tronco Cerebral, Diencéfalo y EncéfaloDocumento20 pagineTronco Cerebral, Diencéfalo y EncéfaloENA FLOR OLANO OBLITASNessuna valutazione finora
- Sondaje nasogástrico: guía paso a paso para colocar una sonda nasogástrica de forma seguraDocumento7 pagineSondaje nasogástrico: guía paso a paso para colocar una sonda nasogástrica de forma seguraperfumedemiel100% (1)
- Proceso ADME CetirizinaDocumento2 pagineProceso ADME Cetirizinaadolfo diazNessuna valutazione finora
- Caratula de EpidemiologiaDocumento1 paginaCaratula de EpidemiologiaAngie GarciaNessuna valutazione finora
- Qué Hacer en Caso de Asfixia Por Cuerpos ExtrañosDocumento2 pagineQué Hacer en Caso de Asfixia Por Cuerpos ExtrañosAntony YqNessuna valutazione finora
- Elementos ComplementariosDocumento5 pagineElementos ComplementariosAnggie danuska Pisco guerraNessuna valutazione finora
- Quemaduras CBPDocumento57 pagineQuemaduras CBPsindy flores huamanNessuna valutazione finora
- Reporte de Practica 1 AnatomiaDocumento14 pagineReporte de Practica 1 AnatomiaMayela sanchezNessuna valutazione finora
- Caso Clinico Semana 13 .Documento8 pagineCaso Clinico Semana 13 .Nickol Guanilo cordovaNessuna valutazione finora
- Anatomía Abdomen Gray Part1Documento4 pagineAnatomía Abdomen Gray Part1Izamal Carlos LeónNessuna valutazione finora
- Guía de Práctica Semana 11. Señalización CelularDocumento12 pagineGuía de Práctica Semana 11. Señalización Celularliliana mireya rojas araujoNessuna valutazione finora
- Neuroanatomía de La SensibilidadDocumento5 pagineNeuroanatomía de La SensibilidadManuela ArangoNessuna valutazione finora
- Anatomia Basica HumanaDocumento87 pagineAnatomia Basica HumanaMARIBEL GUTIERREZ100% (1)
- Articulaciones de la MMSS: Hombro, Codo y sus movimientosDocumento51 pagineArticulaciones de la MMSS: Hombro, Codo y sus movimientosLucio Ricardo Rojas VeraNessuna valutazione finora
- Esqueleto ApendicularDocumento19 pagineEsqueleto ApendicularFranco Molina Ana LauraNessuna valutazione finora
- Documento Sin Título PDFDocumento1 paginaDocumento Sin Título PDFPardo HernanNessuna valutazione finora
- Alistamiento de La Estrategia Final HernanDocumento2 pagineAlistamiento de La Estrategia Final HernanPardo HernanNessuna valutazione finora
- Estrategias Pedagogicas PDFDocumento16 pagineEstrategias Pedagogicas PDFPardo HernanNessuna valutazione finora
- Deporte y RecreaciónDocumento5 pagineDeporte y RecreaciónPardo HernanNessuna valutazione finora
- Comunicación Asertiva en Dancesport Del Club RitmosDocumento14 pagineComunicación Asertiva en Dancesport Del Club RitmosPardo HernanNessuna valutazione finora
- Beneficios del deporte en la saludDocumento50 pagineBeneficios del deporte en la saludFany CaceresNessuna valutazione finora
- Arranque de HalterofiliaDocumento28 pagineArranque de HalterofiliaPardo HernanNessuna valutazione finora
- Arranque de HalterofiliaDocumento2 pagineArranque de HalterofiliaPardo HernanNessuna valutazione finora
- Alistamiento de La Estrategia Final HernanDocumento2 pagineAlistamiento de La Estrategia Final HernanPardo HernanNessuna valutazione finora
- 1Documento42 pagine1EstuardocvNessuna valutazione finora
- ExerciseDocumento5 pagineExercisePardo HernanNessuna valutazione finora
- La CorporeidadDocumento13 pagineLa CorporeidadMiguel HerreraNessuna valutazione finora
- Bailando en la Oscuridad: cuerpo, sentidos y sonoridadesDocumento1 paginaBailando en la Oscuridad: cuerpo, sentidos y sonoridadesPardo HernanNessuna valutazione finora
- CharlaCursoAltoRendimiento PDFDocumento65 pagineCharlaCursoAltoRendimiento PDFRomulo RabetsNessuna valutazione finora
- Analisis Colegio FinalDocumento29 pagineAnalisis Colegio FinalPardo HernanNessuna valutazione finora
- Taller 1. D.H. Hernan Dario Herrera PardoDocumento2 pagineTaller 1. D.H. Hernan Dario Herrera PardoPardo HernanNessuna valutazione finora
- Factorizacion FORMULASDocumento3 pagineFactorizacion FORMULASGarin Miguel Morales CruzNessuna valutazione finora
- Proyecto de VidaDocumento8 pagineProyecto de VidaJhofer CortésNessuna valutazione finora
- Cultural History of Central AmericaDocumento5 pagineCultural History of Central AmericaPardo HernanNessuna valutazione finora
- Arranque de HalterofiliaDocumento8 pagineArranque de HalterofiliaPardo HernanNessuna valutazione finora
- Juegos y aprendizajeDocumento8 pagineJuegos y aprendizajeKenjiHerreraBenitesNessuna valutazione finora
- Saque en Tenis de Mesa 02Documento4 pagineSaque en Tenis de Mesa 02Pardo HernanNessuna valutazione finora
- Esqueleto Apendicular CompletoDocumento29 pagineEsqueleto Apendicular CompletoPardo HernanNessuna valutazione finora
- Ficha Tecnica FPPDocumento2 pagineFicha Tecnica FPPPardo HernanNessuna valutazione finora
- Corrosión Por Solicitud Mecánica-HDHPDocumento41 pagineCorrosión Por Solicitud Mecánica-HDHPPardo HernanNessuna valutazione finora
- EsqueletoDocumento220 pagineEsqueletoPardo Hernan100% (1)
- Taller de Termodinámica, Nernst y Pourbaix 2015-1Documento3 pagineTaller de Termodinámica, Nernst y Pourbaix 2015-1Pardo HernanNessuna valutazione finora
- Escaleras MineraDocumento1 paginaEscaleras MineraPardo HernanNessuna valutazione finora
- Pérdidas de Energía en Tramos Rectos Entrega FluidosDocumento6 paginePérdidas de Energía en Tramos Rectos Entrega FluidosPardo HernanNessuna valutazione finora
- Centro de GravedadDocumento10 pagineCentro de Gravedadyenifer100% (1)
- VeterinariaDocumento26 pagineVeterinariasara isabel Valencia zuletaNessuna valutazione finora
- ECCEMAsDocumento18 pagineECCEMAsapi-3705495100% (1)
- Sistema EndocrinoDocumento16 pagineSistema EndocrinoelidaNessuna valutazione finora
- Capitulo 4 AnatomiaDocumento5 pagineCapitulo 4 AnatomiaAlex LópezNessuna valutazione finora
- Evolución celular: Teoría de la endosimbiosisDocumento4 pagineEvolución celular: Teoría de la endosimbiosisdiego fernando lopezNessuna valutazione finora
- Bioquimica Clase CarbohidratosDocumento45 pagineBioquimica Clase CarbohidratosRafaelAlvaEspinosa100% (1)
- Test de Ansiedad de HamiltonDocumento1 paginaTest de Ansiedad de HamiltonLibra 520Nessuna valutazione finora
- Terminologia QuirurgicaDocumento15 pagineTerminologia QuirurgicaTatiana Chávez Trigoso100% (1)
- Region GluteaDocumento31 pagineRegion Gluteajhoana Guzman100% (1)
- Etapas embarazo semanaDocumento18 pagineEtapas embarazo semanaLopez RayNessuna valutazione finora
- Síntesis de MerrifieldDocumento8 pagineSíntesis de MerrifieldBernardoAlejandroCandiaHerreraNessuna valutazione finora
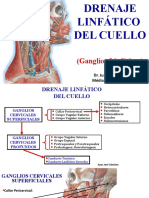
- DrenajeLinfáticoCuelloDocumento9 pagineDrenajeLinfáticoCuelloThaylor Mart Ibañez SandovalNessuna valutazione finora
- Anatomia Forense 1225582479937259 8Documento25 pagineAnatomia Forense 1225582479937259 8Compañerin CixNessuna valutazione finora
- 8 SincronizacionDocumento3 pagine8 SincronizacionYesica Sepulveda QuinteroNessuna valutazione finora
- CAPíTULO 9 LípidosDocumento16 pagineCAPíTULO 9 LípidosJorge ZaucosNessuna valutazione finora
- Cuestionario 2 Bioca CuevasDocumento5 pagineCuestionario 2 Bioca CuevasLiriany CuevasNessuna valutazione finora
- Valores de LaboratorioDocumento36 pagineValores de LaboratorioharryparralesNessuna valutazione finora
- Urgencias y EmergenciasDocumento11 pagineUrgencias y EmergenciasMaite Alis Carballo ANessuna valutazione finora
- Praxia ConceptoDocumento13 paginePraxia ConceptoMare CmaNessuna valutazione finora
- Vos y Tu Voz 2020Documento3 pagineVos y Tu Voz 2020silvanalcalviNessuna valutazione finora
- Tanino - Wikipedia, La Enciclopedia LibreDocumento4 pagineTanino - Wikipedia, La Enciclopedia LibreRenzo PONessuna valutazione finora
- Mastopatia FibroquisticaDocumento26 pagineMastopatia FibroquisticaMiguel Encinas100% (1)
- MicrocorrienteDocumento9 pagineMicrocorrienteIvan FernandezNessuna valutazione finora
- Tarea 6Documento8 pagineTarea 6Kidia OrtízNessuna valutazione finora
- Padron de Daños No Transmisibles (2019)Documento47 paginePadron de Daños No Transmisibles (2019)Anthony Enrique Arrieta GarayarNessuna valutazione finora
- Laboratorio VirtualDocumento31 pagineLaboratorio VirtualJessica OlguínNessuna valutazione finora