Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Geometric Controlla Ot DynamicsDocumento6 pagineGeometric Controlla Ot DynamicsAmino fileNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Optimal Rolling of A Sphere, With Twisting But Without SlippingDocumento36 pagineThe Optimal Rolling of A Sphere, With Twisting But Without SlippingAmino fileNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Singularity Analysis of Closed Kinematic Chains: F. C. ParkDocumento7 pagineSingularity Analysis of Closed Kinematic Chains: F. C. ParkAmino fileNessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Index Terms-Dynamics, Motion Planning, Nonholonomic SystemsDocumento10 pagineIndex Terms-Dynamics, Motion Planning, Nonholonomic SystemsAmino fileNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- A Motion-Planning Algorithm For The Rolling-Body Problem: Franc Ois Alouges, Yacine Chitour, and Ruixing LongDocumento10 pagineA Motion-Planning Algorithm For The Rolling-Body Problem: Franc Ois Alouges, Yacine Chitour, and Ruixing LongAmino fileNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Optimal Rolling of A Sphere, With Twisting But Without SlippingDocumento36 pagineThe Optimal Rolling of A Sphere, With Twisting But Without SlippingAmino fileNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- F 07Documento3 pagineF 07Himanshu MishraNessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- QQQ 2 RDocumento8 pagineQQQ 2 RAmino fileNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Bernoulli EquationDocumento1 paginaBernoulli EquationVasundharaLimayeNessuna valutazione finora
- Introduction To System Identification: Jan Swevers July 2006Documento74 pagineIntroduction To System Identification: Jan Swevers July 2006Amino fileNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Nilpotent Bases For A Class of Nonintegrable Distributions With Applications To Trajectory Generation For Nonholonomic SystemsDocumento18 pagineNilpotent Bases For A Class of Nonintegrable Distributions With Applications To Trajectory Generation For Nonholonomic SystemsAmino fileNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Geometry of The Plate-Ball Problem: Communicated byDocumento24 pagineThe Geometry of The Plate-Ball Problem: Communicated byAmino fileNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Control of Position A Main PoDocumento15 pagineControl of Position A Main PoAmino fileNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Hamiltonian Approach To Stabilization of Nonholonomic Mechanical SystemsDocumento5 pagineHamiltonian Approach To Stabilization of Nonholonomic Mechanical SystemsAmino fileNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Li 1990Documento11 pagineLi 1990Amino fileNessuna valutazione finora
- Kyushu Mechanic Entrance ExamDocumento2 pagineKyushu Mechanic Entrance ExamAmino fileNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- As Me JournalDocumento11 pagineAs Me JournalAmino fileNessuna valutazione finora
- Li2008 PDFDocumento6 pagineLi2008 PDFAmino fileNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- 03 - Procedure of MEXT ScholarshipDocumento2 pagine03 - Procedure of MEXT ScholarshipAmino fileNessuna valutazione finora
- Presentation SpheretalDocumento25 paginePresentation SpheretalAmino fileNessuna valutazione finora
- Fluids - Lecture 13 Notes: Bernoulli EquationDocumento4 pagineFluids - Lecture 13 Notes: Bernoulli EquationAmino fileNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- KIkuDocumento14 pagineKIkuAmino fileNessuna valutazione finora
- Mathematical Association of America Is Collaborating With JSTOR To Digitize, Preserve and Extend Access To The American Mathematical MonthlyDocumento10 pagineMathematical Association of America Is Collaborating With JSTOR To Digitize, Preserve and Extend Access To The American Mathematical MonthlyAmino fileNessuna valutazione finora
- Mirza JunDocumento53 pagineMirza JunAmino fileNessuna valutazione finora
- Lsefse FFDocumento2 pagineLsefse FFAmino fileNessuna valutazione finora
- Nonholonomic FormDocumento42 pagineNonholonomic FormAmino fileNessuna valutazione finora
- Simple Geodesics and Weil-Petersson Volumes of Moduli Spaces of Bordered Riemann SurfacesDocumento49 pagineSimple Geodesics and Weil-Petersson Volumes of Moduli Spaces of Bordered Riemann SurfacesAmino fileNessuna valutazione finora
- Simple Geodesics and Weil-Petersson Volumes of Moduli Spaces of Bordered Riemann SurfacesDocumento49 pagineSimple Geodesics and Weil-Petersson Volumes of Moduli Spaces of Bordered Riemann SurfacesAmino fileNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- 06 2016 MEXT Scholarship Univ RecommendationDocumento4 pagine06 2016 MEXT Scholarship Univ RecommendationAmino fileNessuna valutazione finora
- Robot Control Part 1Documento37 pagineRobot Control Part 1Ramkumar ANessuna valutazione finora
- Schaum's Theory & Problems of Matrices PDFDocumento231 pagineSchaum's Theory & Problems of Matrices PDFJigman23Nessuna valutazione finora
- Implicit Functions and Solutions Mappings. A. L. Dontche, R. T. RockafellarDocumento388 pagineImplicit Functions and Solutions Mappings. A. L. Dontche, R. T. RockafellarMário Da How JNessuna valutazione finora
- Syllabus Mathematics (Honours and Regular) : Submitted ToDocumento19 pagineSyllabus Mathematics (Honours and Regular) : Submitted ToDebasish SharmaNessuna valutazione finora
- 2018 CommentaryDocumento25 pagine2018 CommentaryTamara TopicNessuna valutazione finora
- Bridge Course Meterial OriginalDocumento83 pagineBridge Course Meterial OriginalAswin Thangaraju0% (1)
- Linear Algebra Review: CSC2515 - Machine Learning - Fall 2002Documento7 pagineLinear Algebra Review: CSC2515 - Machine Learning - Fall 2002Pravin BhandarkarNessuna valutazione finora
- BTech (CSIT)Documento128 pagineBTech (CSIT)Ruchi AgarwallNessuna valutazione finora
- Lipschutz LinearAlgebraDocumento340 pagineLipschutz LinearAlgebraAndres Tejedor100% (2)
- Solicar Engineering Review Center and ServicesDocumento7 pagineSolicar Engineering Review Center and ServicesJevan CalaqueNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- C++ For FinanceDocumento264 pagineC++ For FinanceKaran MalhotraNessuna valutazione finora
- Matrices and Its ApplicationDocumento38 pagineMatrices and Its Applicationspurtbd67% (6)
- Assignment 01Documento3 pagineAssignment 01amir khanNessuna valutazione finora
- SSC CGL Syllabus 2015 Tier 1 2 3 New Exam Pattern & PDFDocumento8 pagineSSC CGL Syllabus 2015 Tier 1 2 3 New Exam Pattern & PDFSuresh SuryaNessuna valutazione finora
- Hcia AiDocumento49 pagineHcia AiAlda lumbangaol100% (1)
- Screenshot 2023-03-20 at 5.23.03 PMDocumento77 pagineScreenshot 2023-03-20 at 5.23.03 PMLaxmiNessuna valutazione finora
- A Self Study Course On Finite Element Methods 1610236748Documento216 pagineA Self Study Course On Finite Element Methods 1610236748Ramesha AswathanarayanappaNessuna valutazione finora
- SVD and LSI CombinedDocumento11 pagineSVD and LSI CombinedReni AmuNessuna valutazione finora
- Mtl101 Tut Solutions CombinedDocumento567 pagineMtl101 Tut Solutions CombinedAlbert AinstineNessuna valutazione finora
- Matrix Inversion in Matlab - Gauss-Jordan MethodDocumento3 pagineMatrix Inversion in Matlab - Gauss-Jordan Methodanon020202Nessuna valutazione finora
- 2003 CaoDocumento21 pagine2003 Caomehmet gezerNessuna valutazione finora
- Mathematics II Course OutlineDocumento5 pagineMathematics II Course OutlinejessekaishirightNessuna valutazione finora
- Alevel FP1Documento35 pagineAlevel FP1nuddin123Nessuna valutazione finora
- S Parameter Theory of Lossless BlockDocumento14 pagineS Parameter Theory of Lossless BlockthgnguyenNessuna valutazione finora
- MATHS - 1A QUESTION BANK - Chapter Wise Important Questions For IPEDocumento19 pagineMATHS - 1A QUESTION BANK - Chapter Wise Important Questions For IPESairam Varma M88% (69)
- Geometry of Linear Transformations of The PlaneDocumento4 pagineGeometry of Linear Transformations of The PlanekvdornNessuna valutazione finora
- ESE Paper With AnswersDocumento4 pagineESE Paper With AnswersSahil YardiNessuna valutazione finora
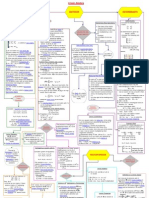
- Linear Algebra Flow Diagram 1Documento1 paginaLinear Algebra Flow Diagram 1stansmith1100% (1)
- Syllabus PDFDocumento176 pagineSyllabus PDFSanket KumbharNessuna valutazione finora
- Arduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Da EverandArduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Valutazione: 4 su 5 stelle4/5 (3)
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureDa EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureValutazione: 4.5 su 5 stelle4.5/5 (2)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindDa EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNessuna valutazione finora
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Da EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Valutazione: 4 su 5 stelle4/5 (5)
- A Welder’s Handbook to Robotic ProgrammingDa EverandA Welder’s Handbook to Robotic ProgrammingValutazione: 5 su 5 stelle5/5 (3)
- Artificial Intelligence: From Medieval Robots to Neural NetworksDa EverandArtificial Intelligence: From Medieval Robots to Neural NetworksValutazione: 4 su 5 stelle4/5 (4)