Potrebbero piacerti anche
- Compensación de Fricción para Un Péndulo de FurutaDocumento6 pagineCompensación de Fricción para Un Péndulo de Furutakarlosandres82Nessuna valutazione finora
- Grippers y Herramientas para RobotsDocumento24 pagineGrippers y Herramientas para Robotskarlosandres82Nessuna valutazione finora
- Control de Un Péndulo de Furuta en Modo GrúaDocumento6 pagineControl de Un Péndulo de Furuta en Modo Grúakarlosandres82Nessuna valutazione finora
- Grippers y Herramientas para RobotsDocumento24 pagineGrippers y Herramientas para Robotskarlosandres82Nessuna valutazione finora
- Electromagnetismo en el átomo de hidrógenoDocumento3 pagineElectromagnetismo en el átomo de hidrógenofatima100% (1)
- Ciencias Naturales QuimicaDocumento54 pagineCiencias Naturales QuimicalujulNessuna valutazione finora
- Tema 2Documento39 pagineTema 2José Lobato TrujilloNessuna valutazione finora
- Fuente de alimentación para taller de electricidad generalDocumento2 pagineFuente de alimentación para taller de electricidad generalAndres ChinoNessuna valutazione finora
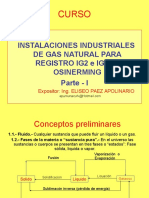
- Instalaciones Industriales de Gas NaturalDocumento107 pagineInstalaciones Industriales de Gas NaturalWiwiDataNessuna valutazione finora
- Practica 5Documento7 paginePractica 5maria jose santoyoNessuna valutazione finora
- Las 7 Energias Que Se Mueven en El Cosmos Felix Enrique Davila VargasDocumento54 pagineLas 7 Energias Que Se Mueven en El Cosmos Felix Enrique Davila VargasJuan GarzonNessuna valutazione finora
- Presentaciòn de Protecciòn Radiològica para ClaseDocumento55 paginePresentaciòn de Protecciòn Radiològica para Claserafamendoza1991Nessuna valutazione finora
- Formas de Pensamientos Leadbeater PDFDocumento36 pagineFormas de Pensamientos Leadbeater PDFOmar GastiNessuna valutazione finora
- Guia 1Documento2 pagineGuia 1Eduardo MendozaNessuna valutazione finora
- Prueba Razonamiento Conceptos Fisicas Ii PDFDocumento12 paginePrueba Razonamiento Conceptos Fisicas Ii PDFPablo RestrepoNessuna valutazione finora
- Amorrrrr de Mi VidaaaaaaaDocumento6 pagineAmorrrrr de Mi VidaaaaaaaAngie DiazNessuna valutazione finora
- Texto Word de Transgeneracional On-LineDocumento19 pagineTexto Word de Transgeneracional On-LineVir Ginia Riva75% (4)
- Taller 2 - Fisica IIIDocumento10 pagineTaller 2 - Fisica IIIJUAN JOSE RAMIREZ MARTINEZNessuna valutazione finora
- Evaluación ElectrotecniaDocumento5 pagineEvaluación ElectrotecniaWilson RcallaNessuna valutazione finora
- FisicoquimicaDocumento3 pagineFisicoquimicaChristian MartinezNessuna valutazione finora
- METEO5Documento21 pagineMETEO5dflNessuna valutazione finora
- 2019 06 Coi Madrid Fisica Exam CriteriosDocumento3 pagine2019 06 Coi Madrid Fisica Exam Criterioskenichi shukehiroNessuna valutazione finora
- Conveccion Libre y ForzadaDocumento12 pagineConveccion Libre y ForzadarocioNessuna valutazione finora
- Antirresonancia Circuito Tanque.Documento6 pagineAntirresonancia Circuito Tanque.Julian David Lopez Paz MolanoNessuna valutazione finora
- Tipos de Interacciones en La NaturalezaDocumento10 pagineTipos de Interacciones en La NaturalezaJuan Juuzou SuzuyaNessuna valutazione finora
- Reología de AlimentosDocumento61 pagineReología de AlimentosAugusto Maroa100% (2)
- Lab N1 de Sis. Circuitos II-Yury Frank Quispe BandaDocumento11 pagineLab N1 de Sis. Circuitos II-Yury Frank Quispe BandaOsarm CHNessuna valutazione finora
- Propiedades periódicas y enlaces químicosDocumento3 paginePropiedades periódicas y enlaces químicosFrancisco AlexisNessuna valutazione finora
- Kcod U2 A1 Enam.Documento3 pagineKcod U2 A1 Enam.Kristina WhiteNessuna valutazione finora
- Registros Litológicos Gamma RayDocumento39 pagineRegistros Litológicos Gamma RayManuel AzancotNessuna valutazione finora
- Maquinas y MecanismosDocumento32 pagineMaquinas y MecanismosGerman Ortiz MonroyNessuna valutazione finora
- FisicDocumento9 pagineFisicAna Iris CastroNessuna valutazione finora
- Tesis - Sea Keeping Analysis - Fpsos - Luis AlcalaDocumento198 pagineTesis - Sea Keeping Analysis - Fpsos - Luis AlcalaEYUY7U7UUIRE50% (2)
- El Ser Humano Del Futuro - OriginalDocumento19 pagineEl Ser Humano Del Futuro - OriginalClau ChisNessuna valutazione finora
- Estadística básica: Introducción a la estadística con RDa EverandEstadística básica: Introducción a la estadística con RValutazione: 5 su 5 stelle5/5 (8)
- El cerebro matemático: Cómo nacen, viven y a veces mueren los números en nuestra menteDa EverandEl cerebro matemático: Cómo nacen, viven y a veces mueren los números en nuestra menteValutazione: 4 su 5 stelle4/5 (5)
- Cuántica: Qué significa la teoría de la ciencia más extrañaDa EverandCuántica: Qué significa la teoría de la ciencia más extrañaValutazione: 1 su 5 stelle1/5 (1)
- Diseño urbano: Teoría y Método. Tercera edición actualizadaDa EverandDiseño urbano: Teoría y Método. Tercera edición actualizadaNessuna valutazione finora
- La matriz divina: Un puente entre el tiempo, el espacio, las creencias y los milagrosDa EverandLa matriz divina: Un puente entre el tiempo, el espacio, las creencias y los milagrosValutazione: 4 su 5 stelle4/5 (72)
- Manual NSCA: Fundamentos del entrenamiento personalDa EverandManual NSCA: Fundamentos del entrenamiento personalValutazione: 5 su 5 stelle5/5 (8)
- Física paso a paso: Más de 100 problemas resueltosDa EverandFísica paso a paso: Más de 100 problemas resueltosValutazione: 4 su 5 stelle4/5 (12)
- El físico y el filósofo: Albert Einstein, Henri Bergson y el debate que cambió nuestra comprensión del tiempoDa EverandEl físico y el filósofo: Albert Einstein, Henri Bergson y el debate que cambió nuestra comprensión del tiempoNessuna valutazione finora
- Apuntes de diseño de interiores: Principios básicos de escalas, espacios, colores y másDa EverandApuntes de diseño de interiores: Principios básicos de escalas, espacios, colores y másValutazione: 4.5 su 5 stelle4.5/5 (20)
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDa EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoValutazione: 4.5 su 5 stelle4.5/5 (12)