Potrebbero piacerti anche
- In Sin/n (wt+2-) : Ahve andDocumento7 pagineIn Sin/n (wt+2-) : Ahve andayash mohantyNessuna valutazione finora
- Introduction WindenergyDocumento33 pagineIntroduction Windenergyayash mohantyNessuna valutazione finora
- Design of Wind RotorDocumento23 pagineDesign of Wind Rotorayash mohantyNessuna valutazione finora
- Aerodynamics Wind EnergyDocumento25 pagineAerodynamics Wind Energyayash mohantyNessuna valutazione finora
- Induction GeneratorDocumento61 pagineInduction Generatorayash mohantyNessuna valutazione finora
- Introduction Class1Documento10 pagineIntroduction Class1ayash mohantyNessuna valutazione finora
- Lab Report: Experiment-3Documento6 pagineLab Report: Experiment-3ayash mohantyNessuna valutazione finora
- Seminar Report REVISEDDocumento21 pagineSeminar Report REVISEDayash mohantyNessuna valutazione finora
- Self Excited Induction GeneratorDocumento6 pagineSelf Excited Induction Generatorayash mohantyNessuna valutazione finora
- Lab Report: Experiment-2Documento6 pagineLab Report: Experiment-2ayash mohanty100% (1)
- Problem Statement:: Answer To 2 (A)Documento4 pagineProblem Statement:: Answer To 2 (A)ayash mohantyNessuna valutazione finora
- Soft ComputingDocumento42 pagineSoft Computingayash mohantyNessuna valutazione finora
- What Is An Inverter?: Classification of InvertersDocumento11 pagineWhat Is An Inverter?: Classification of Invertersayash mohantyNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Manual Danfoss FC302Documento80 pagineManual Danfoss FC302fulanosultano100% (1)
- Worked Examples For A Three - Phase Induction MachineDocumento12 pagineWorked Examples For A Three - Phase Induction MachineAli AltahirNessuna valutazione finora
- Induction Motor TorquesDocumento40 pagineInduction Motor TorquesJaniel MalitNessuna valutazione finora
- Automobile Engineering Laboratory (UME502) Technical Report On Starting/Cranking SystemsDocumento3 pagineAutomobile Engineering Laboratory (UME502) Technical Report On Starting/Cranking SystemsMudit JainNessuna valutazione finora
- Effect of Parallel Misalignment in Rotating MachineryDocumento3 pagineEffect of Parallel Misalignment in Rotating MachineryresearchparksNessuna valutazione finora
- Electrical Fudamental Quiz 3Documento18 pagineElectrical Fudamental Quiz 3Ahyad Arif Abdul Rahman100% (2)
- Electrical Engineering PDFDocumento45 pagineElectrical Engineering PDFSudershan DolliNessuna valutazione finora
- Symposium On The Lift and Escalator TechnologiesDocumento4 pagineSymposium On The Lift and Escalator TechnologiesfreddyjoertyNessuna valutazione finora
- Rajshahi University of Engineering &technologyDocumento4 pagineRajshahi University of Engineering &technologyদিব্যজয় পালNessuna valutazione finora
- Service Manual Washer Extractor: Type W.55.HDocumento98 pagineService Manual Washer Extractor: Type W.55.Hnotoriousneal12Nessuna valutazione finora
- Miniproject 1Documento4 pagineMiniproject 1TERMIN8R GameNessuna valutazione finora
- Manual PLC-01-05 2014 0219Documento26 pagineManual PLC-01-05 2014 0219JanneDoee0% (1)
- Brushless DC Electric MotorDocumento24 pagineBrushless DC Electric MotorBrent CarlNessuna valutazione finora
- SMC-3, SMC Flex, and SMC-50 Smart Motor Controller SpecificationsDocumento168 pagineSMC-3, SMC Flex, and SMC-50 Smart Motor Controller SpecificationsOscar Miño VillaoNessuna valutazione finora
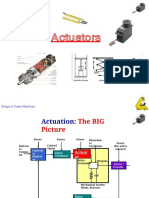
- ActuatorsDocumento51 pagineActuatorsApdo MustafaNessuna valutazione finora
- Bendix KR87 Install ManualDocumento66 pagineBendix KR87 Install ManualMike JonesNessuna valutazione finora
- Simulation of Un-Symmetrical 2-Phase Induction MotorDocumento4 pagineSimulation of Un-Symmetrical 2-Phase Induction MotorijcsnNessuna valutazione finora
- Variable Frequency DriveDocumento9 pagineVariable Frequency DriveOsama SalemNessuna valutazione finora
- Design & Development of Human Energized Oil Expeller MachineDocumento4 pagineDesign & Development of Human Energized Oil Expeller MachineTalha yasinNessuna valutazione finora
- ANSI AGMA 6113-B16 Factor de ServicioDocumento84 pagineANSI AGMA 6113-B16 Factor de ServiciovortegabNessuna valutazione finora
- Prob Set 1Documento2 pagineProb Set 1Roshan meenaNessuna valutazione finora
- Practical Design Against Torsional Vibration Mark A. Corbo and Stanley B. Melanoski 199628032016Documento30 paginePractical Design Against Torsional Vibration Mark A. Corbo and Stanley B. Melanoski 199628032016mfhaleem@pgesco.comNessuna valutazione finora
- MS5900 Motor & Phase Rotation Indicator Users ManualDocumento10 pagineMS5900 Motor & Phase Rotation Indicator Users ManualParveen ArifNessuna valutazione finora
- SKF Xtra Power BeltsDocumento24 pagineSKF Xtra Power BeltsCarlos A. Marroquin CordovaNessuna valutazione finora
- Written TestDocumento4 pagineWritten TestFERDINAND BANAGANessuna valutazione finora
- PDO - OHD CranesDocumento18 paginePDO - OHD CranesMuhammad ImranNessuna valutazione finora
- Baldor Driver PDFDocumento162 pagineBaldor Driver PDFtranhuutuongNessuna valutazione finora
- Solar Operated Jib CraneDocumento36 pagineSolar Operated Jib CraneJilly Arasu100% (1)
- QKS16-VF Hxdoor2Documento24 pagineQKS16-VF Hxdoor2Curt NeilsonNessuna valutazione finora
- (GAS TURBINE MS 5001 PA) Volume IDocumento159 pagine(GAS TURBINE MS 5001 PA) Volume Ihayder ahmed100% (2)