Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1091)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Natural Gas Dehydration With TEG 1Documento20 pagineNatural Gas Dehydration With TEG 1koo_kamel4664100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
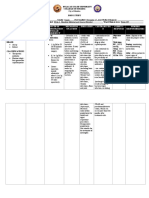
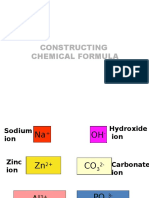
- Final Demo Lesson PlanDocumento12 pagineFinal Demo Lesson PlanRandz TakiawanNessuna valutazione finora
- Debate-Script 1Documento3 pagineDebate-Script 1api-537254339Nessuna valutazione finora
- I Used To Be A Desgin StudentDocumento256 pagineI Used To Be A Desgin StudentMLNessuna valutazione finora
- Basic Git Commands - Atlassian DocumentationDocumento2 pagineBasic Git Commands - Atlassian DocumentationpoojaNessuna valutazione finora
- Sampling-Based Binary-Level Cross-Platform Performance EstimationDocumento6 pagineSampling-Based Binary-Level Cross-Platform Performance EstimationpoojaNessuna valutazione finora
- CS 332: Algorithms: All00/lecture18Documento43 pagineCS 332: Algorithms: All00/lecture18poojaNessuna valutazione finora
- Automatic Place-and-Route of Emerging LED-driven Wires Within A Monolithically-Integrated CMOS+III-V ProcessDocumento6 pagineAutomatic Place-and-Route of Emerging LED-driven Wires Within A Monolithically-Integrated CMOS+III-V ProcesspoojaNessuna valutazione finora
- Optimizing Temperature Guardbands: Hussam Amrouch, Behnam Khaleghi and J Org HenkelDocumento6 pagineOptimizing Temperature Guardbands: Hussam Amrouch, Behnam Khaleghi and J Org HenkelpoojaNessuna valutazione finora
- An Introduction To Robot Kinematics: Renata MelamudDocumento42 pagineAn Introduction To Robot Kinematics: Renata MelamudpoojaNessuna valutazione finora
- CMU EbookDocumento26 pagineCMU Ebookpooja0% (1)
- A PDFDocumento6 pagineA PDFpoojaNessuna valutazione finora
- ROS Cheat Sheet: Filesystem Command-Line ToolsDocumento2 pagineROS Cheat Sheet: Filesystem Command-Line ToolsVictor Poisot MartinezNessuna valutazione finora
- ITWS2 Assignment - 1 Shell ScriptingDocumento2 pagineITWS2 Assignment - 1 Shell ScriptingpoojaNessuna valutazione finora
- TN Madan SecularismDocumento32 pagineTN Madan Secularismpooja100% (1)
- CDT 13003Documento4 pagineCDT 13003Alf HdezNessuna valutazione finora
- SLC Motor Oil Series 1Documento8 pagineSLC Motor Oil Series 1Anonymous QE8o0gjNessuna valutazione finora
- L1 - Introduction-Underground StructuresDocumento38 pagineL1 - Introduction-Underground Structuresroxcox216Nessuna valutazione finora
- Ofelia L. Mendoza - Drug StudyDocumento3 pagineOfelia L. Mendoza - Drug StudyMaenard JavierNessuna valutazione finora
- Cis 252 Lab1Documento4 pagineCis 252 Lab1Jack RyanNessuna valutazione finora
- Viva Website1Documento8 pagineViva Website1api-61083281Nessuna valutazione finora
- FaDocumento20 pagineFaVishwanath ShervegarNessuna valutazione finora
- Tata Motors Anual Report 2016Documento288 pagineTata Motors Anual Report 2016DwarikaNessuna valutazione finora
- Carson Moniz Resume 2021Documento2 pagineCarson Moniz Resume 2021Carson MonizNessuna valutazione finora
- DeloitteConsulting - Nancy Singhal ResumeDocumento4 pagineDeloitteConsulting - Nancy Singhal ResumeHemant BharadwajNessuna valutazione finora
- PortfolioDocumento24 paginePortfolioAditi SharmaNessuna valutazione finora
- Sample Annual BudgetDocumento4 pagineSample Annual BudgetMary Ann B. GabucanNessuna valutazione finora
- Bernhard FrankenDocumento20 pagineBernhard FrankenManimegalai Prasanna0% (1)
- AEspec DCNM Wireless A E Specification enUS 144115205101560971Documento21 pagineAEspec DCNM Wireless A E Specification enUS 144115205101560971Dwi Ayu RomsNessuna valutazione finora
- Chemical EquationsDocumento22 pagineChemical EquationsSiti Norasikin MuhyaddinNessuna valutazione finora
- 14 - Press Release - DuravitFranke - enDocumento2 pagine14 - Press Release - DuravitFranke - enSaran BaskarNessuna valutazione finora
- 1 s2.0 S2213343717303950 MainDocumento9 pagine1 s2.0 S2213343717303950 MainSeyram DavidNessuna valutazione finora
- BCG Most Innovative Companies Mar 2019 R2 - tcm38 215836 PDFDocumento22 pagineBCG Most Innovative Companies Mar 2019 R2 - tcm38 215836 PDFAbhinav SrivastavaNessuna valutazione finora
- Dividend PolicyDocumento26 pagineDividend PolicyAnup Verma100% (1)
- Infosys - Covid-19 CrisisDocumento21 pagineInfosys - Covid-19 CrisisDhivyaNessuna valutazione finora
- Inspur Server BIOS User Manual V1.1Documento154 pagineInspur Server BIOS User Manual V1.1albertoNessuna valutazione finora
- Quiz 528Documento16 pagineQuiz 528Haris NoonNessuna valutazione finora
- Project Name: Management Functions of BisconniDocumento6 pagineProject Name: Management Functions of BisconniUsman RaoNessuna valutazione finora
- Hofstede's Cultural DimensionsDocumento19 pagineHofstede's Cultural DimensionsbublusNessuna valutazione finora
- Vector Control of Cage Induction Motors, A Physical InsightDocumento10 pagineVector Control of Cage Induction Motors, A Physical InsightSamuel Alves de SouzaNessuna valutazione finora
- Resume For Deck CadetDocumento4 pagineResume For Deck CadetDaniel M. MartinNessuna valutazione finora