Potrebbero piacerti anche
- 3 - Esercizi RisoltiDocumento258 pagine3 - Esercizi RisoltiprevrtljivacNessuna valutazione finora
- Elementi Di Meccanica PDFDocumento55 pagineElementi Di Meccanica PDFMatteoNessuna valutazione finora
- Studio Del Moto Di Un'elicaDocumento19 pagineStudio Del Moto Di Un'elicaSpazimmensi NoLimitsNessuna valutazione finora
- Esercizi TrasmissioniDocumento14 pagineEsercizi TrasmissioniFrancesco CangioliNessuna valutazione finora
- Esercizi TrasmissioniDocumento14 pagineEsercizi TrasmissioniFrancesco CangioliNessuna valutazione finora
- Formulario FisicaDocumento4 pagineFormulario FisicaBudinomattoNessuna valutazione finora
- Travi CurveDocumento4 pagineTravi CurvePippo FrancoNessuna valutazione finora
- Fondazioni - Lancellotta Calavera Mcgraw HillDocumento6 pagineFondazioni - Lancellotta Calavera Mcgraw HillValdri VasquezNessuna valutazione finora
- Elementi Di Stabilità PDFDocumento12 pagineElementi Di Stabilità PDFAleNessuna valutazione finora
- Appello Mam SvoltoDocumento5 pagineAppello Mam Svoltomattia De CiccoNessuna valutazione finora
- Rotismi Ordinari Ed EpicicloidaliDocumento31 pagineRotismi Ordinari Ed EpicicloidaliValerio Jackson MelucciNessuna valutazione finora
- M01a - Sintesi Planetario 1Documento2 pagineM01a - Sintesi Planetario 1perty92Nessuna valutazione finora
- Trav I CurveDocumento4 pagineTrav I CurvesignormitariNessuna valutazione finora
- Motore Asincrono1Documento86 pagineMotore Asincrono1Frank MillerNessuna valutazione finora
- Acfrogb0mh8yom Ju5h9nqdgqagxf5w27ryfftnmg7o322p5j2qmaxeicmkkqbjkyvvq7zstdm15hh3gd16rjrph5eucjjdztjd64ena4sjtvyc0pli2 Vfbw9puwkk R9swua7x50sj81txok ZDocumento145 pagineAcfrogb0mh8yom Ju5h9nqdgqagxf5w27ryfftnmg7o322p5j2qmaxeicmkkqbjkyvvq7zstdm15hh3gd16rjrph5eucjjdztjd64ena4sjtvyc0pli2 Vfbw9puwkk R9swua7x50sj81txok ZFrancesco BraccoNessuna valutazione finora
- 5 Dinamica Verticale 12Documento20 pagine5 Dinamica Verticale 12Domenico VerbicaroNessuna valutazione finora
- 21 Sintesi Per Tentativi PDFDocumento16 pagine21 Sintesi Per Tentativi PDFGiovanni MenchinellaNessuna valutazione finora
- Scelta MotoriduttoreDocumento19 pagineScelta MotoriduttoreFilippo MeliniNessuna valutazione finora
- Lezione13 3 PDFDocumento9 pagineLezione13 3 PDFMMNessuna valutazione finora
- Torsione Nei PontiDocumento9 pagineTorsione Nei PontiIlaria IorlanoNessuna valutazione finora
- Eser3 1Documento6 pagineEser3 1Lkh dmtNessuna valutazione finora
- Nunziante Scienza Delle Costruzioni Friction CriteriaDocumento8 pagineNunziante Scienza Delle Costruzioni Friction Criteriaanna maria nataleNessuna valutazione finora
- Travi CurveDocumento4 pagineTravi CurveTrinchettoNessuna valutazione finora
- Momento MotoreDocumento19 pagineMomento MotoreraffacapNessuna valutazione finora
- CammeDocumento19 pagineCammeTrinchettoNessuna valutazione finora
- Regola Della Traslazione PDFDocumento16 pagineRegola Della Traslazione PDFChiaraNessuna valutazione finora
- Trasformatore TrifaseDocumento7 pagineTrasformatore TrifaseAlessandro CostantiniNessuna valutazione finora
- Formulario PDFDocumento1 paginaFormulario PDFMonica ActisNessuna valutazione finora
- AlimentatoriDocumento25 pagineAlimentatoriMarco TosoniNessuna valutazione finora
- Zanichelli Pidatella Volume2 Sintesi05Documento2 pagineZanichelli Pidatella Volume2 Sintesi05AndreaConcilioNessuna valutazione finora
- Alimentatori PDFDocumento25 pagineAlimentatori PDFMichele FestaNessuna valutazione finora
- Es10 21 05 19Documento3 pagineEs10 21 05 19Lorenzo Campanella0% (1)
- FisicaI TsDocumento5 pagineFisicaI TsAngelo NobiliNessuna valutazione finora
- Lezione 23 - Instabilità Flesso-TorsionaleDocumento6 pagineLezione 23 - Instabilità Flesso-Torsionaleil mascheratoNessuna valutazione finora
- Cap5.1 Introduzione Turbomacchine PDFDocumento8 pagineCap5.1 Introduzione Turbomacchine PDFDaniloNessuna valutazione finora
- Corto Circuito CapVIIIDocumento15 pagineCorto Circuito CapVIIIbosnia76Nessuna valutazione finora
- Raggiungere Un Oggetto Che Accelera - Esercizio FisicaDocumento2 pagineRaggiungere Un Oggetto Che Accelera - Esercizio FisicaRaabin TjedmankicNessuna valutazione finora
- cINEMATICA GEOMETRICADocumento24 paginecINEMATICA GEOMETRICALeonardoNessuna valutazione finora
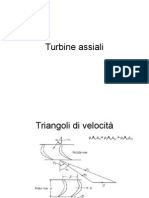
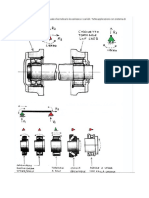
- 4 - Turbine AssialiDocumento37 pagine4 - Turbine AssialiStefano Camillucci0% (1)
- Siemens TrafoDocumento34 pagineSiemens TrafoJohny Lamas VenturaNessuna valutazione finora
- Dispense MApp Cap5 NewDocumento11 pagineDispense MApp Cap5 NewManuel LentiNessuna valutazione finora
- CammeDocumento6 pagineCammeAndrea Dwight CostanzoNessuna valutazione finora
- 03 Sistemi Trifase 2Documento28 pagine03 Sistemi Trifase 2Eduardo MooreNessuna valutazione finora
- 16 Macchine AsincroneDocumento23 pagine16 Macchine AsincronemikeNessuna valutazione finora
- Moto in Due o Tre DimensioniDocumento8 pagineMoto in Due o Tre DimensioniSimone VigoNessuna valutazione finora
- Azion BrushDocumento10 pagineAzion BrushGiuseppe LaudaniNessuna valutazione finora
- Trasmissioni MeccanicheDocumento52 pagineTrasmissioni Meccanicheeustachio.cosolaNessuna valutazione finora
- FisicaI TsDocumento4 pagineFisicaI TsAngelo NobiliNessuna valutazione finora
- Avviamento Di Un AscensoreDocumento4 pagineAvviamento Di Un AscensoreVincenzo Sanseviero100% (1)
- Modulo 2Documento25 pagineModulo 2Dario MarcoraNessuna valutazione finora
- La Matematica Delle Piramidi Di GizaDocumento8 pagineLa Matematica Delle Piramidi Di GizaPaolopiniNessuna valutazione finora
- Esercizi TransitoriDocumento12 pagineEsercizi TransitoriLoredana MateaNessuna valutazione finora
- 4.5.batimetria-Pl Bat 01Documento1 pagina4.5.batimetria-Pl Bat 01HERNAN MORENONessuna valutazione finora
- Il Motore Brushless (Complesso)Documento18 pagineIl Motore Brushless (Complesso)sanboa3Nessuna valutazione finora
- Dimenzioniranje Podrožnice PDFDocumento25 pagineDimenzioniranje Podrožnice PDFElena FranjičićNessuna valutazione finora
- Lezione 5.le Piastre CircolariDocumento60 pagineLezione 5.le Piastre Circolariq_giovanniNessuna valutazione finora
- Esempi Prove Scritte AA 2017-2018Documento4 pagineEsempi Prove Scritte AA 2017-2018GianpaellaNessuna valutazione finora
- SterzoDocumento15 pagineSterzoDario MarcoraNessuna valutazione finora
- Meccanica OrbitaleDocumento9 pagineMeccanica Orbitalefluffa23Nessuna valutazione finora
- (Scienze Delle Costruzioni E Costruzioni Di Macchine) Equazione Della Linea Elastica Dal FranciosiDocumento6 pagine(Scienze Delle Costruzioni E Costruzioni Di Macchine) Equazione Della Linea Elastica Dal FranciosiGianfranco PerilliNessuna valutazione finora
- Esami FisicaDocumento169 pagineEsami FisicaPietro CamponeschiNessuna valutazione finora
- Esempio Serbatoio Parete Sottile PDFDocumento18 pagineEsempio Serbatoio Parete Sottile PDFMattia ParentiNessuna valutazione finora
- Linea ElasticaDocumento37 pagineLinea ElasticaMatteoNessuna valutazione finora
- Sportello Acquedotto e FognaturaDocumento1 paginaSportello Acquedotto e FognaturaMatteoNessuna valutazione finora
- Lm33 Ing IndustrialeDocumento79 pagineLm33 Ing IndustrialeMatteoNessuna valutazione finora
- Cuscinetti Vincoli EquivalenzaDocumento6 pagineCuscinetti Vincoli EquivalenzaMatteoNessuna valutazione finora
- Analisi Modale SperimentaleDocumento2 pagineAnalisi Modale SperimentaleMatteoNessuna valutazione finora
- Robot IndustrialiDocumento2 pagineRobot IndustrialiMatteoNessuna valutazione finora
- Calcolo Impianto OleodinamicoDocumento15 pagineCalcolo Impianto Oleodinamicogioscorza2Nessuna valutazione finora
- Ruote e RotismiDocumento37 pagineRuote e Rotismifabio106Nessuna valutazione finora
- Eagle Pd-IDocumento24 pagineEagle Pd-Iwilderness_666Nessuna valutazione finora
- Planetary GearboxDocumento31 paginePlanetary GearboxDaniele Fioretti100% (1)
- Meccanica AgrariaDocumento110 pagineMeccanica AgrariaGiuseppe GaglianoNessuna valutazione finora
- Progetto Dell'elicaDocumento250 pagineProgetto Dell'elicanaufragatoNessuna valutazione finora