Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Ieee Argencon 2016 Paper 84
Caricato da
ademargcjuniorCopyright
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoIeee Argencon 2016 Paper 84
Caricato da
ademargcjuniorIMPLEMENTACION DE UN SISTEMA DE
SEGURIDAD BANCARIO EN SISTEMAS
EMBEBIDOS UTILIZANDO INTELIGENCIA
ARTIFICIAL
Andres Marin#1, Jesus Ortiz #2, Oscar Gualdron #3
#
EEST, Universidad de Pamplona
Kilometro 1 Via Bucaramanga, Pamplona, Colombia
1andres.marin@unipamplona.edu
1jesus.ortiz@unipamplona.edu
3oscar.gualdron@unipamplona.edu
Abstract— This work is to be developed is a security system I. INTRODUCCION
which aims to generate an alarm event robberies evaluating Los sistemas de seguridad bancario convencionales están
possible to provide greater security and bank staff cashiers conformados por cámaras de vigilancia y otros sensores entre
responsible for raising money; This project is out of known estos se puede mencionar el botón de pánico el cual su función
technologies such as artificial intelligence which will assess es por medio de su pulsación activa la alarma pero este debe
dangerous situations and have artificial vision which will be ser accionado por el cajero del banco, teniendo en cuenta esto
responsible for extracting features that reflect a possible robbery
algunos métodos de atracos es pedir a los cajero que alcen las
event so that artificial intelligence assessed the situation, when
talking about a feature that reflects robbery event is to mention
,manos para que así no se pueda accionar el sistema de
an involuntary act as lifting the hands or the fact of putting the seguridad impidiendo el aviso a las personas encargadas de la
hands in the chest; is also present GSM technology which has the seguridad, con el sistema que se realizó lo que se tuvo presente
task of notification of a possible event of robbery by a call and son las reacciones más comunes de un cajero durante un atraco
sending a text message, the whole project is implemented on the como por ejemplo levantar las manos o manos en el pecho para
development board so Raspberry Pi embedded. así hacer la activación del sistema de forma automática esto se
logró gracias al trabajar visión artificial y redes neuronales en
Resumen: En este trabajo lo que se va desarrollar es un un sistema embebido con la tarjeta de desarrollo la Raspberry
sistema de seguridad el cual tiene como propósito generar un pi.
estado de alarma evaluando posible eventos de atracos para así
brindar una mayor seguridad al personal del banco los cajeros El sistema realiza tres procesos muy importantes que
encargados de la recaudación de dinero; este proyecto hace consta de visón artificial, inteligencia artificial y notificación
provecho de las tecnologías conocidas como la inteligencia del estado de la alarma, el primer proceso es la visión artificial
artificial la cual va a evaluar si presentan situaciones de peligro y lo que realiza es una captura de una imagen en una matriz de
visión artificial la cual estará encargada de extraer pixeles la cual se aplica técnicas de tratamiento de imágenes en
características que reflejen un posible evento de atraco para que el lenguaje Python para así extraer características o patrones.
así la inteligencia artificial evalué la situación, cuando se habla de
una característica que reflejo de evento de atraco se quiere
mencionar un acto involuntario como alzar la manos o el hecho En la parte de la inteligencia artificial se implementa una
de poner la manos en el pecho; también se encuentra presente la red neuronal la cual va clasificar en dos clases los patrones
tecnología GSM que se tiene la tarea de la notificación de un obtenidos, la clase 1 que representa que hay un evento
posible evento de atraco por medio de una llamada y él envió de importante un patrón de atraco y la otra clase dos la cual no se
un mensaje de texto, todo este proyecto se encuentra presenta ningún evento.
implementado en la tarjeta de desarrollo Raspberry pi de forma
embebida. Notificación se realiza el caso que la red neuronal de un
como salida clase 1 quiere decir un estado de alarma, la
Keywords— Security system, artificial vision, artificial neural notificación se realiza por medio de tecnología GSM
network, Raspberry Pi, Python realizando una llamada a un número asignado y mandando un
mensaje de advertencia.
entradas que presentan pequeñas variaciones
debido a los efectos de ruido.
Abstraer: las redes neuronales por su esencia
capturan la información importante de las
entradas.
C. Hardware Implementado
Fig. 1. Diagrama de flujo del sistema
II. METODOLOGIA
En el siguiente apartado se describen cada uno de los métodos
utilizados para el desarrollo del sistema embebido.
A. Vision Artificial
Se puede expresar que la visión artificial (VA) describe la Fig. 2. Sistema completamente acoplado
deducción automática de la estructura y propiedades de un
mundo tridimensional posiblemente dinámico, bien a partir de En la imagen anterior podemos observar todo el sistema
una o varias imágenes bidimensionales del mundo. Por un lado, con sus componentes acoplados.
esta descripción debe estar relacionada de algún modo con
aquella realidad que produce la imagen y, por el otro, debe En el recuadro rojo se puede observar el modulo de cámara
contener toda la información requerida para la tarea de la camera py la cual es la encargada de hacerla captura de las
interacción con el medio ambiente que se desea llevar a cabo. imágenes la cual se comunica por medio de una cinta plana con
la Raspberry pi por CSI (camera serial interfaz).En el recuadro
B. Redes Neuronales azul se encuentra la tarjeta de desarrollo la Raspberry pi es la
encargada de hacer el procesamiento de la información realizar
las acciones correspondientes.El recuadro amarillo es el
Las Redes Neuronales Artificiales, ANN (Artificial Neural modulo GSM M95 con la tarjeta de auxiliar para los acoples de
Networks) están inspiradas en las redes neuronales biológicas tensión ttl de la comunicación serial de 5v- 3.3v, este modulo
del cerebro humano. Están constituidas por elementos que se GSM se comunica con la Raspberry pi por medio del protocoló
comportan de forma similar a la neurona biológica en sus serial a 9600 baudios.El recuadro verde son los pines GPIO de
funciones más comunes. Estos elementos están organizados de la Raspberry pi, entre los cuales están los pines de Tx y Rx de
una forma parecida a la que presenta el cerebro humano [4]. la comunicación serial con el modulo GSM también están dos
Las redes neuronales al margen de parecerse al cerebro, GPIO uno como entrada con un pulsador a tierra para el
presentan una serie de características propias. Por ejemplo, las apagado del sistema y uno como salida para un LED indicando
ANN aprenden de la experiencia, generalizan de ejemplos el encendido del sistema y también la activación de la alarma.
previos a otros nuevos y abstraen las características principales
de una serie de datos.
Para realizar este proceso se deben cumplir las siguientes
etapas:
Aprender: adquirir el conocimiento de una cosa
por medio del estudio, ejercicio o experiencia. Las
redes neuronales pueden cambiar su rendimiento
en función del entorno de aprendizaje.
Generalizar: las redes neuronales generalizan
automáticamente debido a su propia estructura y
naturaleza. Estas redes pueden ofrecer, dentro de
un margen determinado, respuestas correctas a
Fig. 3. Diagrama en bloques del hardware del sistema
D. Red MLP en Matlab Inteligencia artificial
Notificación del estado de alarma.
MATLAB cuenta con la toolbox ANN que permite trabajar
con redes neuronales artificiales multicapa. En un algoritmo B. Adquisicion de imagenes
sencillamente se asigna con que dígitos, vectores o matrices la Ahora en el programa principal la cámara se trabaja como
red va a entrenar y con cuales va a validar. Queda a disposición video a la resolución de 640x480 y 32 fotogramas por segundo,
del usuario configurar cuantas neuronas va a utilizar, función en la cual se captura una imagen esta imagen es cargada a una
de activación de cada una de las capas, iteraciones entre variable como una matriz de pixeles por medio de la librería
neuronas, etc. Una vez la toolbox ha finalizado el proceso en de OpenCV en lenguaje de programación Python se realiza
una estructura llamada net entrega toda la información de la una serie de tratamientos el primero es para reducir el ruido es
red, y de ahí es precisamente donde se obtienen los pesos y los un filtro conocido como filtro gaussiano el cual difumina la
umbrales para llevarlos al código fuente. imagen obtenida, posteriormente se realiza una trasformación a
la imagen de RGB a HSV para hacer una segmentación con
uno valores mínimos y máximos HSV para así realizar una
separación de pixeles de tonalidades específicas, luego a esta
imagen obtenida se le realiza una binarización la cual lo que
hace es pasar los pixeles de obtenidos con valor de 1 y el resto
de la imagen con un valor de cero así obteniendo una imagen
es blanco y negro, para eliminar el ruido y mejorar la imagen
que se obtuvo se realiza una técnica de morfología conocida
como dilatación, ya después de todo esto se realiza un conteo
de pixeles de valor de 1 con esto valor es el patrón que luego se
introducirá para que nuestra red implementada en código la
clasifiqué.
Fig. 4. Entrenamiento de la red neuronal
En la figura 4 se observa la caja de herramientas (Toolbox)
de redes neuronales de MATLAB durante el entrenamiento.
Una vez que él ha encontrado los pesos que garantizan por lo
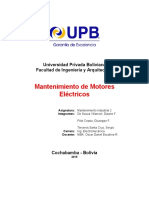
menos el 80% de efectividad, la toolbox se detiene y envía los Fig. 5. Proceso de tratamieto a las imagenes
resultados de la red, la red tuvo una efectividad del 100%.
De izquierda a derecha y de la parte superior
III. PROGRAMACION Y DESARROLLO 1.Filtro gaussiano
A. Estructura del programa principal en Python 2. RGB a HSV
La estructura del programa principal como se había 3.Binarización
mencionado con anterioridad consta de tres procesos
importantes todos ejecutados en uno solo script implementado 4.Dilatación
en la Raspberry pi escrito en el lenguaje de programación 5.Contorno en las regiones donde se encuentra piel.
Python y se hace uso de la Liberia OpenCV.
Para recordar lo tres procesos consisten:
Visión artificial
C. Red Neuronal D. Notificacion del estado de alarma
En la red neuronal se tiene las 10 neuronas de la capa oculta Cuando se obtiene un clasificación en una imagen de clase
y la neurona de la capa de salida, la función de activación para 1 significa que puede haber un posible evento de atraco, se
las primeras es Tansig y para la de salida es Purelin. necesita hacer una notificación al personal encargado; esta
activación debe ser silenciosa para no genera más
Una vez que llega el valor del patrón extraído en el anterior inconvenientes o repercusiones negativas al cajero por eso se
proceso este se pasa por las 10 primeras neuronas donde se trabajó con tecnología GSM el cual realiza una llamada y él
multiplican por sus pesos, se le suma el umbral y se calcula la envió de un mensaje notificando el estado del sistema, el
función Tansig, la salida de cada neurona de la capa oculta es módulo GSM se comunica con la tarjeta de desarrollo
una entrada de la neurona de salida. En la neurona de salida las Raspberry pi con el protocolo de comunicación serial y con
señales provenientes de la capa oculta se multiplican por los comandos AT
pesos se suma el umbral y la salida al ser Purelin, la entrada es
la misma salida Si la clasificación de la red fue de clase 2 significa que no
hay ningún evento y el programa realizara de nuevo todo el
Todo lo anterior se implementa en código Python el cual se proceso como un bucle infinito repitiendo las operaciones
realiza con gran versatilidad ya que la Raspberry pi cuenta con anteriores, también lo hará cuando haya notificado el evento de
punto flotante y Python tiene librerías matemáticas que clase 1
permiten el uso directo de la función exponencial, se realiza
una función la cual permita calcular el valor de la función
tangente hiperbólica sigmoidea
Lo que realiza la red en este proceso es la clasificación de IV. RESULTADOS Y PORCENTAJE DE ERROR
la imagen por medio del patrón obtenido en dos clases, clase 1 Los resultados de la clasificación cuando se evalúa las
significa que se presenta un posible evento de atraco y la clase fotos se imprime en pantalla mostrando la clase que pertenece
2 no hay ningún evento. la foto y se realiza una llamada si pertenece a clase 1 estos
fueron los resultados obtenidos con las fotos de la simulación
las cuales son diez y fueron escogida aleatoriamente.
TABLA 1. Resultados de validación de la data
NOMBRE CLASES RESULT|ADO
DE LA DE LAS OBTENIDO
FOTO MUESTRAS
FotoRED320 Clase 2 Clase 2
Foto RED19 Clase 1 Clase 1
Foto RED20 Clase 1 Clase 1
FotoRED619 Clase 1 Clase 1
FotoRED319 Clase 2 Clase 2
FotoRED220 Clase 1 Clase 1
FotoRED420 Clase 2 Clase 2
FotoRED620 Clase 1 Clase 1
Fig. 6. Imagen que pertenece a la clase 1 FotoRED219 Clase 1 Clase 1
FotoRED520 Clase 2 Clase 2
El porcentaje de error obtenido fue del 0%, las 10 fotos de
muestras aleatorias que se les realizo el tratamiento y se
tomaron sus patrones obtenidos y la red implementada en
Python dio una clasificación positiva, sin importar el orden de
las muestras
Con este resultado es de esperar que al unir todos los
algoritmos el resultado sea igual de efectivo que al hacerlo
solamente con fotos de muestras sino con video y captura de
imágenes en tiempo real.
Fig. 7. Imagen que pertenece a la clase 2
V. CONCLUSIONES
La tarjeta de desarrollo Raspberry pi debido que es una
herramienta muy poderosa y versátil la cual permite diferentes
entornos de programación y plataformas teniendo a la mano un
tarjeta de desarrollo que entrega la facilidad de interconectar
trabajos de electrónica, con un sistema operativo para el trabajo
de proyectos complejos; Como es el caso del lenguaje Python
con la Liberia OpenCV que permiten la implementación de
visión artificial e inteligencia artificial en un sistema embebido
y también cuenta con vector de punto flotante.
Otro factor importante es el bajo costo en el cual se puede
adquirir comparado con otras tarjetas en el mercado y sin
olvidar mencionar la tecnología que ofrecen permite el
desarrollo de nuevos proyectos que solo hubieran sido posible
realizando una gran inversión o destinar una computadora en el
proceso haciendo inviables los proyectos.
Uno de los mayores inconvenientes que se encontró en el
proyecto fue el ambiente el cual al no ser un ambiente
totalmente controlado permitiría la introducción de ruido en el
tratamiento a variables indeseados los cuales se podrían
trabajar con otra técnica de tratamientos, pero los cuales
presentan inconvenientes son técnicas relativamente nuevas y
no se consigue gran documentación para su implementación y
requieren un alto costo de rendimiento de un procesador.
Por esto se opta por un tratamiento no tan complejos para el
tiempo de ejecución no sea muy grande y así poder hacer el
programa en tiempo real; también se debe considerar que se
está trabajando con un potente ARM cortex a 32 bit, pero el
cual se ve corto con algunos procesos en el tratamiento de
imágenes, estos procesos a un se ven cortos en algunos
computadores portátiles.
Fig. 8. Algoritmo del programa principal Esto no quiere decir que en la Raspberry no se pueda
implementar tratamiento de mayor complejidad lo que se
requiere dar entender es que en este proyecto el factor tiempo
jugaba un valor muy importante imposibilitando usar varias
técnicas, Pero un proyecto donde este no juego un papel
principal se podrían llevar a cabo trabajos de mayor
complejidad.
Se realizó la implementación visión artificial y de una red
neuronal en un sistema embebido gracias a las prestaciones de
Raspberry y la versatilidad y la optimización de la librería para
visión artificial OpenCV y de más librerías requeridas en el
lenguaje Python, llegando a permitir realizar un sistema de
seguridad utilizando inteligencia artificial y visión artificial.
REFERENCIAS
[1] O. Gualdron, C. Duran, J. Ortiz, and J. Araque, “Implementation of a
neural model in a hardware device(FPGA) for the classification of
chemical compounds in a multisensory (E-nose),” Rev. Colomb. Tecnol.
Fig. 9. Imagen del resultado de la validación Av., vol. 2, no. 24, pp. 127–133, 2014.
[2] Ms. C. Esperanza, I. S. Cesar, Calderón, and I. Milton, “SMART HOME
Como se ilustra en la figura 30 se alcanza apreciar un CONTROL BY VOICE USING NEURAL NETWORKS,” vol. 1, pp.
contorno de color azul y unos recuadros de color verde en la 16–20, 2015.
imagen obtenida en la validación sobre las aéreas detectadas [3] E. S. Blanco, A. R. Francisco, and R. A. Edgar, “Personal de la Revista,”
rostro y manos. Desarro. un Sist. Detección Mov. basado en Flujo Óptico en Raspberry
Pi, vol. 4, pp. 65 – 76, 2015.
[4] C. M. Andrés Ernesto López Sandoval and Martínez, “la mecatronica en
mexico,” Sist. Autenticación Facial Median. la Implementación del
Algoritm. PCA Modif. en Sist. embebidos con Arquit. ARM, vol. 4, pp.
53–64, 2015.
[5] J. A. Triñanes, J. Torres, and A. T. C. Hernández, “Clasificación de
imágenes multiespectrales mediante redes neuronales,” Rev. Teledetec.,
pp. 1–5, 1994.
[6] E. M. i García, Visión Artificial, 1st ed. 2012.
[7] X. O. Basogain, “Redes Neuronales Artificiales Y Sus Aplicaciones,”
Med. Intensiva, vol. 29, no. 1, pp. 13–20, 2005.
[8] D. J. Matich, “Redes Neuronales: Conceptos Básicos y Aplicaciones.,”
Historia Santiago., p. 55, 2001.
[9] TEXAS INSTRUMENTS. ARM Cortex-M4F based MCU TM4C1294
Connected LaunchPad. [En línea]. http://www.ti.com/tool/ek-
tm4c1294xl. [citado el 25 de Octubre de 2015].
[10] TEXAS INSTRUMENTS. BeagleBone Black Developmentacional. [En
línea]. http://www.ti.com/tool/beaglebk. [citado el 25 de Octubre de
2015]
[11] RASPBERRY PI. Raspberry pi 2 . [En línea].
https://www.raspberrypi.org/blog/raspberry-pi-2-on-sale/. [citado el 25
de Octubre de 2015]
[12] [12] KHALIL, Rafid Ahmed, AL-KAZZAZ, Sa’ad Ahmed. Digital
Hardware Implementation of Artificial Neuron Model Using FPGA. En:
Department of Electrical Engineering, University of Mosul, Mosul, Iraq
[13] J. Ortiz, O. Gualdron, and C. Duran. “Detection of pesticide in the vesca
fregaria through an electronic nose” IEEE CHILECON 2015, pp. 127–
133, 2015.
Potrebbero piacerti anche
- Ieee Argencon 2016 Paper 83Documento6 pagineIeee Argencon 2016 Paper 83ademargcjuniorNessuna valutazione finora
- Ieee Argencon 2016 Paper 80Documento3 pagineIeee Argencon 2016 Paper 80ademargcjuniorNessuna valutazione finora
- Ieee Argencon 2016 Paper 62Documento7 pagineIeee Argencon 2016 Paper 62ademargcjuniorNessuna valutazione finora
- Ieee Argencon 2016 Paper 37Documento5 pagineIeee Argencon 2016 Paper 37ademargcjuniorNessuna valutazione finora
- Ieee Argencon 2016 Paper 20Documento6 pagineIeee Argencon 2016 Paper 20ademargcjuniorNessuna valutazione finora
- 1995 - Refrigeración de Alimentos PDFDocumento7 pagine1995 - Refrigeración de Alimentos PDFademargcjuniorNessuna valutazione finora
- Actas Jenui2016Documento394 pagineActas Jenui2016ademargcjunior0% (1)
- 1995 - Refrigeración de Alimentos PDFDocumento7 pagine1995 - Refrigeración de Alimentos PDFademargcjuniorNessuna valutazione finora
- 1981 - Un Convertidor de Caudal en Frecuencia PDFDocumento2 pagine1981 - Un Convertidor de Caudal en Frecuencia PDFademargcjuniorNessuna valutazione finora
- 1 ACTIVIDAD de Instalaciones Electricas DomiciliariasDocumento7 pagine1 ACTIVIDAD de Instalaciones Electricas Domiciliariaskaritho1227100% (2)
- Es4200000 - Estrobo Liniero DielectricoDocumento2 pagineEs4200000 - Estrobo Liniero DielectricoCristian Gonzalo Yaupe SilvaNessuna valutazione finora
- Trabajo Práctico de Laboratorio #8 - Red-Ox y CeldasDocumento3 pagineTrabajo Práctico de Laboratorio #8 - Red-Ox y CeldasImanol ZabalaNessuna valutazione finora
- Columnas de Longitud Intermedia Formulas EmpíricasDocumento16 pagineColumnas de Longitud Intermedia Formulas Empíricas'Abrahan Isaac0% (1)
- ADIH-AV2-60-1200 (22 Ene 2019)Documento8 pagineADIH-AV2-60-1200 (22 Ene 2019)Jose M. HernandezNessuna valutazione finora
- Wichmann, Eyvind H. - Berkeley Physics Course. Vol. 4 Física Cuántica. 4-Reverté (1972)Documento503 pagineWichmann, Eyvind H. - Berkeley Physics Course. Vol. 4 Física Cuántica. 4-Reverté (1972)Anonymous D3SZ9MgrrDNessuna valutazione finora
- Contaminacion de SuelosDocumento61 pagineContaminacion de SuelosAnghela Ortiz FloresNessuna valutazione finora
- 1er Examen Parcial ResueltoDocumento5 pagine1er Examen Parcial ResueltoZeico3Nessuna valutazione finora
- Tabla Rendimientos de Mano de ObraDocumento9 pagineTabla Rendimientos de Mano de Obraricardo841021Nessuna valutazione finora
- Memoria BHP PDFDocumento171 pagineMemoria BHP PDFMauricio Sergio Salamanca SilvaNessuna valutazione finora
- Mascara MSA - ESDocumento32 pagineMascara MSA - ESmareNessuna valutazione finora
- Memorias Proyecto PuentesDocumento50 pagineMemorias Proyecto PuentesMaqMaikNessuna valutazione finora
- Levantamiento-Brujula-Cinta PROYECTODocumento42 pagineLevantamiento-Brujula-Cinta PROYECTOCesar Ronald Colque MendizabalNessuna valutazione finora
- Informe Final 2Documento17 pagineInforme Final 2EstivenAlarconPillcoNessuna valutazione finora
- Geologia Paramo en SantanderDocumento53 pagineGeologia Paramo en SantanderDubban AtseutaNessuna valutazione finora
- Mantenimiento de Motores EléctricosDocumento31 pagineMantenimiento de Motores EléctricosSergio Terceros Santa Cruz100% (3)
- Circuitos Electrónicos 1 Clase HDocumento31 pagineCircuitos Electrónicos 1 Clase HPaolo Torreblanca LazoNessuna valutazione finora
- Coeficiente de Convección o PelicularDocumento5 pagineCoeficiente de Convección o PelicularAdoBrodNessuna valutazione finora
- SCT Terracerias Estructuras Drenaje Pavimento y SeñalizacionDocumento5 pagineSCT Terracerias Estructuras Drenaje Pavimento y SeñalizacionAngel VenegasNessuna valutazione finora
- Informe y Presupuesto de Reparacion de Alarma Cafae Ricardo Palma Chosica Diciembre 2021Documento3 pagineInforme y Presupuesto de Reparacion de Alarma Cafae Ricardo Palma Chosica Diciembre 2021Eduardo MegoNessuna valutazione finora
- Especificacion Tecnica Arquitectura Escuela Ave FenixDocumento8 pagineEspecificacion Tecnica Arquitectura Escuela Ave FenixFelipe Yañez GómezNessuna valutazione finora
- TranspocketDocumento52 pagineTranspocketyalo24Nessuna valutazione finora
- Lab 8 - Flip Flop - RegistrosDocumento11 pagineLab 8 - Flip Flop - RegistrosBilly Markos Felix GutierrezNessuna valutazione finora
- Material AcripolDocumento3 pagineMaterial AcripolSamaraFonnegraArangoNessuna valutazione finora
- Aseguramiento de CalidadDocumento21 pagineAseguramiento de CalidadjuancarvitNessuna valutazione finora
- Manual de Usuario 2012 Zm303Documento72 pagineManual de Usuario 2012 Zm303Edgar Eduardo Lopez RiveraNessuna valutazione finora
- Fabricacion de Un MotorDocumento5 pagineFabricacion de Un MotorSergio PedrozoNessuna valutazione finora
- Tuberías de Polietileno de Alta DensidadDocumento1 paginaTuberías de Polietileno de Alta DensidadSantiago Loría NavaNessuna valutazione finora
- Cap. 4. - Limites de Consistencia Del SueloDocumento9 pagineCap. 4. - Limites de Consistencia Del SueloLisbeth Ticona AndradeNessuna valutazione finora