Potrebbero piacerti anche
- Manual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Da EverandManual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Valutazione: 2 su 5 stelle2/5 (1)
- Unidad 3. - Introducción A La Teoría de ControlDocumento44 pagineUnidad 3. - Introducción A La Teoría de ControlMarco SosaNessuna valutazione finora
- Instrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Da EverandInstrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Valutazione: 4.5 su 5 stelle4.5/5 (8)
- Unidad 3.-Introducción A La Teoría de Control PDFDocumento44 pagineUnidad 3.-Introducción A La Teoría de Control PDFMario Gonzalez100% (1)
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasDa EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasValutazione: 2.5 su 5 stelle2.5/5 (3)
- Sistemas de Control Lazo Abierto y Lazo CerradoDocumento11 pagineSistemas de Control Lazo Abierto y Lazo CerradosistemaelectricoNessuna valutazione finora
- Guia de Estudio. Lazo Abierto y Cerrado.Documento9 pagineGuia de Estudio. Lazo Abierto y Cerrado.alfredojsm1812Nessuna valutazione finora
- SAC 1aDocumento11 pagineSAC 1aRudy Omar Cordova OjedaNessuna valutazione finora
- Introduccion Alos Sistemas de ControlDocumento6 pagineIntroduccion Alos Sistemas de ControlRamon PerezNessuna valutazione finora
- Unidad IIIDocumento51 pagineUnidad IIISalvadorNessuna valutazione finora
- Sistemas de ControlDocumento9 pagineSistemas de Controlronald millanNessuna valutazione finora
- Unidad 1 de ChiquionnnnDocumento11 pagineUnidad 1 de Chiquionnnnmarlon kadhir castro mayoralNessuna valutazione finora
- Resumen Sistemas de ControlDocumento7 pagineResumen Sistemas de ControlFranklin Morillo100% (3)
- Control de Procesos IndustrialaesDocumento26 pagineControl de Procesos IndustrialaesbonperezNessuna valutazione finora
- Sistema de Lazo AbiertoDocumento6 pagineSistema de Lazo Abiertocesar david67% (3)
- Instrumentación y Control de ProcesosDocumento7 pagineInstrumentación y Control de ProcesosAle KeyNessuna valutazione finora
- AutomatismosDocumento7 pagineAutomatismosCarlos GonzalezNessuna valutazione finora
- SEGUNDA SEMANA - Sistemas de Control Lazo Abierto, Lazo CerradoDocumento8 pagineSEGUNDA SEMANA - Sistemas de Control Lazo Abierto, Lazo CerradojoseNessuna valutazione finora
- Control RetroalimentadoDocumento39 pagineControl RetroalimentadoJavier ChaiñaNessuna valutazione finora
- Tipos de AutomatizacionDocumento15 pagineTipos de Automatizacionrad radgNessuna valutazione finora
- Control RetroalimentadoDocumento41 pagineControl RetroalimentadoJavier Chaiña0% (1)
- Ingenieria de ControlDocumento10 pagineIngenieria de ControlMiri MartinezNessuna valutazione finora
- Manual Universitario de Sistemas de Control AutomaticoDocumento33 pagineManual Universitario de Sistemas de Control AutomaticoAlexNessuna valutazione finora
- (Control Analogico) Evaluacion Unidad IIIDocumento16 pagine(Control Analogico) Evaluacion Unidad IIIAlfonso García MartínezNessuna valutazione finora
- Caracterización de Sistemas de ControlDocumento9 pagineCaracterización de Sistemas de ControlAlan GarciaNessuna valutazione finora
- Control de Lazo AbiertoDocumento2 pagineControl de Lazo AbiertoJorge Leonardo suntaxiNessuna valutazione finora
- PAE I Clase 6Documento14 paginePAE I Clase 6Adrián SuárezNessuna valutazione finora
- Tarea Control2Documento5 pagineTarea Control2MONICA PAMELA ARGUIJO CEBALLOSNessuna valutazione finora
- Equipo2 SistemadeLazoCerradoDocumento16 pagineEquipo2 SistemadeLazoCerradoJimena Lopez RiveraNessuna valutazione finora
- Variable Controlada y Señal de Control o Variable ManipuladaDocumento5 pagineVariable Controlada y Señal de Control o Variable ManipuladaMARCO ANTONIONessuna valutazione finora
- Tarea Control2Documento5 pagineTarea Control2MONICA PAMELA ARGUIJO CEBALLOSNessuna valutazione finora
- Etapa4 Equipo KFCDocumento33 pagineEtapa4 Equipo KFCnicole benitezNessuna valutazione finora
- Sistemas de Control I PDFDocumento19 pagineSistemas de Control I PDFJuan Andrade TasendeNessuna valutazione finora
- Practica 1 Cuestionario 1Documento4 paginePractica 1 Cuestionario 1Abigail Cetina uicabNessuna valutazione finora
- CONTROLADORES Jiménez+gilDocumento38 pagineCONTROLADORES Jiménez+gilYunis JimenezNessuna valutazione finora
- Tema 1. Introducción A Los Sistemas de Medida y RegulaciónDocumento14 pagineTema 1. Introducción A Los Sistemas de Medida y RegulaciónpepeNessuna valutazione finora
- Definiciones Basicas de ControlDocumento16 pagineDefiniciones Basicas de Controlgvobioelectric100% (1)
- Sistemas de ControlDocumento7 pagineSistemas de ControlLautaro Bragagnolo100% (1)
- Tecnicas de Control de Chancadoras.Documento12 pagineTecnicas de Control de Chancadoras.marcos ruizNessuna valutazione finora
- Tecnlogía de Control TP2Documento9 pagineTecnlogía de Control TP2Francisco HerreraNessuna valutazione finora
- Simulacion de Los Sistemas de ControlDocumento13 pagineSimulacion de Los Sistemas de ControlGesse SteinerNessuna valutazione finora
- Terminología y Definiciones Básicas PDFDocumento4 pagineTerminología y Definiciones Básicas PDFYohelis ZapataNessuna valutazione finora
- Control AutomaticoDocumento6 pagineControl AutomaticoLeo Papatopo LaraNessuna valutazione finora
- Sistemas de ControlDocumento11 pagineSistemas de ControlJessica Trujillo IslasNessuna valutazione finora
- Tema 6. Sistemas AutomáticosDocumento32 pagineTema 6. Sistemas AutomáticosRichar GuzmanNessuna valutazione finora
- P1 - 2 - Introduccion A Los Sistemas de ControlDocumento12 pagineP1 - 2 - Introduccion A Los Sistemas de Controlsofy naranjoNessuna valutazione finora
- Sistemas de Control A Lazo Abierto y A Lazo Cerrado - PIDDocumento14 pagineSistemas de Control A Lazo Abierto y A Lazo Cerrado - PIDFidel ParedesNessuna valutazione finora
- Diagrama de BloquesDocumento6 pagineDiagrama de BloquesVanessa De La CruzNessuna valutazione finora
- Tarea 1 Definición de Electrónica de Control PDFDocumento4 pagineTarea 1 Definición de Electrónica de Control PDFIssei Aono AMVs ナヴァNessuna valutazione finora
- Informe Sistemas de Control Practica 8 O813PDocumento9 pagineInforme Sistemas de Control Practica 8 O813PGamer AllianceNessuna valutazione finora
- Proyecto-Final ControlDocumento12 pagineProyecto-Final ControlANAHI SOSA ROMERONessuna valutazione finora
- Tipos de ControlesDocumento5 pagineTipos de ControlesMarco PerezNessuna valutazione finora
- Sistemas de ControlDocumento3 pagineSistemas de Controljesus guzmanNessuna valutazione finora
- Unidad 1 Ingeneria ControlDocumento9 pagineUnidad 1 Ingeneria Controlhector quiroz garciaNessuna valutazione finora
- Fase 2 Sistemas Dinamicos Diego RestrepoDocumento14 pagineFase 2 Sistemas Dinamicos Diego RestrepoDiego Mauricio Restrepo SalazarNessuna valutazione finora
- Sistemas de Control Automatico Benjamin KuoDocumento21 pagineSistemas de Control Automatico Benjamin Kuocalvin8999100% (2)
- Sistemas Automatizados y Redes IndustrialesDocumento29 pagineSistemas Automatizados y Redes IndustrialesIng. Eliezer Valencia50% (2)
- Unidad 1 Ingenieria de Control Clasico 1Documento22 pagineUnidad 1 Ingenieria de Control Clasico 1JORGESOLANOIEM100% (4)
- Sistemas de ControlDocumento3 pagineSistemas de ControlCRISTIAN ANTONIO PEREZ ATENCIANessuna valutazione finora
- Sistema de Control de Lazo Abierto y Lazo CerradoDocumento7 pagineSistema de Control de Lazo Abierto y Lazo CerradoenigiacoNessuna valutazione finora
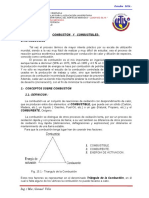
- 02 Tema #02 - Combustion y CombustiblesDocumento12 pagine02 Tema #02 - Combustion y CombustiblesIsmael VelizNessuna valutazione finora
- Propuesta de Normativa Interra de Funcionamiento Del Consejo Academico PDFDocumento9 paginePropuesta de Normativa Interra de Funcionamiento Del Consejo Academico PDFIsmael VelizNessuna valutazione finora
- Estrategias Didácticas Del PSI en MecánicaDocumento12 pagineEstrategias Didácticas Del PSI en MecánicaIsmael VelizNessuna valutazione finora
- Clase #01 El Plan de AccionDocumento5 pagineClase #01 El Plan de AccionIsmael VelizNessuna valutazione finora
- Clase #05 - Formalidades de Presentacion Del PsiDocumento4 pagineClase #05 - Formalidades de Presentacion Del PsiIsmael VelizNessuna valutazione finora
- Proyecto PNF Mecanica PDFDocumento71 pagineProyecto PNF Mecanica PDFIsmael Veliz100% (1)
- Metodologia de La InvestigacionDocumento33 pagineMetodologia de La InvestigacionIsmael Veliz100% (1)
- Vibraciones MecanicasDocumento205 pagineVibraciones MecanicasHUGONessuna valutazione finora
- 01 Tema #01 - El Vapor y Sus Aplicaciones PDFDocumento16 pagine01 Tema #01 - El Vapor y Sus Aplicaciones PDFIsmael VelizNessuna valutazione finora
- Material de HornosDocumento29 pagineMaterial de HornosIsmael VelizNessuna valutazione finora
- Est A Tic ADocumento22 pagineEst A Tic ACar FacuNessuna valutazione finora
- Problemas Resueltos MotoresDocumento16 pagineProblemas Resueltos MotoresJoseLopezNessuna valutazione finora
- 01 Tema #01 - El Vapor y Sus Aplicaciones PDFDocumento14 pagine01 Tema #01 - El Vapor y Sus Aplicaciones PDFIsmael VelizNessuna valutazione finora
- Electrodos de HornosDocumento64 pagineElectrodos de HornosIsmael VelizNessuna valutazione finora
- PRODUCTIVIDAD Capitulo4Documento45 paginePRODUCTIVIDAD Capitulo4Neftalí Gómez ZapataNessuna valutazione finora
- Tesis Deficd de AtencionDocumento314 pagineTesis Deficd de Atencionrabino7000100% (1)
- Conduccion de CalorDocumento9 pagineConduccion de CalorIsmael VelizNessuna valutazione finora
- Tema #01. - Filosofia y Metodos de DiseñoDocumento22 pagineTema #01. - Filosofia y Metodos de DiseñoIsmael Veliz50% (2)
- Aceros Aleados Influencia de Las AleacionesDocumento6 pagineAceros Aleados Influencia de Las AleacionesRaul YepezNessuna valutazione finora
- Tesis Completo 110624084428 Phpapp02Documento205 pagineTesis Completo 110624084428 Phpapp02Jean Rivera100% (1)
- Productividad PDFDocumento5 pagineProductividad PDFCarolina Lantigua CepedaNessuna valutazione finora
- El Proceso de Combustion en MCIDocumento160 pagineEl Proceso de Combustion en MCIOmar E PerezNessuna valutazione finora
- Concepto de DiseñoDocumento35 pagineConcepto de DiseñosSSADADADNessuna valutazione finora
- 06lapedagogacritica 090519180121 Phpapp02Documento64 pagine06lapedagogacritica 090519180121 Phpapp02Ismael VelizNessuna valutazione finora
- Flujo CompresibleDocumento74 pagineFlujo CompresiblejMora89Nessuna valutazione finora
- 01 Tema #01 - El Vapor y Sus AplicacionesDocumento14 pagine01 Tema #01 - El Vapor y Sus AplicacionesIsmael VelizNessuna valutazione finora
- Diseño de Horno de Crisol para Fundir AluminioDocumento181 pagineDiseño de Horno de Crisol para Fundir AluminioIsmael Veliz100% (1)
- Unidad 2. Inst. Electricas ResidencialesDocumento25 pagineUnidad 2. Inst. Electricas ResidencialesIsmael VelizNessuna valutazione finora
- Diseño de Elementos de Maquinas - FairesDocumento411 pagineDiseño de Elementos de Maquinas - Fairesnando_cbarg91% (11)
- Plan 402Documento2 paginePlan 402Julián VLNessuna valutazione finora
- Resumen Libro VIDAS DESPERDICIADAS (Rafael) (1478)Documento13 pagineResumen Libro VIDAS DESPERDICIADAS (Rafael) (1478)Comquip lolwut100% (3)
- Investigacion - Introduccion A La Ingenieria-NocheDocumento19 pagineInvestigacion - Introduccion A La Ingenieria-NocheJHERSON ARON DELGADO RIOSNessuna valutazione finora
- B Estrada PYK-Velasco CJM-SDDocumento73 pagineB Estrada PYK-Velasco CJM-SDjose luisNessuna valutazione finora
- Cursos Y Diplomados de CAAV Universidad de Medios AudiovisualesDocumento21 pagineCursos Y Diplomados de CAAV Universidad de Medios AudiovisualesJuanCarlos YogiNessuna valutazione finora
- Diseño Gràfico para Las Redes Sociales - CompressedDocumento18 pagineDiseño Gràfico para Las Redes Sociales - Compressedpaola monteverde floresNessuna valutazione finora
- El Proceso de Preproduccion en Stop MotionDocumento29 pagineEl Proceso de Preproduccion en Stop Motionttap79Nessuna valutazione finora
- Guía de Elaboración de Un Proyecto de InvestigaciónDocumento5 pagineGuía de Elaboración de Un Proyecto de InvestigaciónDan Fex100% (1)
- Calidad Unidad3Documento80 pagineCalidad Unidad3Ariamgel0% (1)
- Guía Espacios Verdes UrbanosDocumento188 pagineGuía Espacios Verdes UrbanosYeison SalabarriaNessuna valutazione finora
- Rubrica para Evaluar Proyectos Eureka 2022Documento20 pagineRubrica para Evaluar Proyectos Eureka 2022Ruth Mercedes Zapata CaychoNessuna valutazione finora
- Matrices de Relación de Contabilidad y Auditoria 2. Competencias y LogrosDocumento8 pagineMatrices de Relación de Contabilidad y Auditoria 2. Competencias y LogrosLic. Humberto GonzalezNessuna valutazione finora
- Reglamento Estatal de ZonificaciónDocumento232 pagineReglamento Estatal de ZonificaciónAlejandro100% (1)
- Analisis A Empresa Trabajo Eje 2Documento17 pagineAnalisis A Empresa Trabajo Eje 2Dicson Alejandro Valencia AgudeloNessuna valutazione finora
- Nec2011-Cap.2-Peligro Sismico y Requisitos de Diseño Sismo Resistente-021412Documento78 pagineNec2011-Cap.2-Peligro Sismico y Requisitos de Diseño Sismo Resistente-021412Maria Luisa Mendoza PoggiNessuna valutazione finora
- 1 IngenieríaDocumento4 pagine1 IngenieríaFreddy RamosNessuna valutazione finora
- Anteproyecto Arquitectónico Con Enfoque Bioclimático Del Centro Turístico "Brisa Marina" en El Balneario de Huehuete, Municipio de Jinotepe, Departamento de CarazoDocumento116 pagineAnteproyecto Arquitectónico Con Enfoque Bioclimático Del Centro Turístico "Brisa Marina" en El Balneario de Huehuete, Municipio de Jinotepe, Departamento de Carazomayorganavarro2958Nessuna valutazione finora
- Clasificacion de Los Sistemas de SaludDocumento9 pagineClasificacion de Los Sistemas de SaludJavierNessuna valutazione finora
- Evaluación de Necesidades para La Transición Escuela-Trabajo de Alumnos Con Necesidades Especiales Una Investigación ColaborativaDocumento19 pagineEvaluación de Necesidades para La Transición Escuela-Trabajo de Alumnos Con Necesidades Especiales Una Investigación ColaborativaNaia Ventura FiblaNessuna valutazione finora
- Caracterizacion Geomecanica Del Macizo RocosoDocumento13 pagineCaracterizacion Geomecanica Del Macizo RocosoChristian Mendizabal Contreras100% (1)
- GUIA DISEÑO CURRICULAR COMPROMISOdocxDocumento47 pagineGUIA DISEÑO CURRICULAR COMPROMISOdocxOmayra Posada MorenoNessuna valutazione finora
- Hidraulica Urbana FaltaDocumento44 pagineHidraulica Urbana FaltaGianmartin Cavero UribeNessuna valutazione finora
- Planeación 6°Documento18 paginePlaneación 6°centrocopiadoseivin4Nessuna valutazione finora
- 100000A03Q TallerDeDisenoArquitectonicoIDocumento6 pagine100000A03Q TallerDeDisenoArquitectonicoIEdwin Mejia100% (1)
- Antecedente 1 ARQDocumento87 pagineAntecedente 1 ARQangelicaNessuna valutazione finora
- Español Charmillot Et DayerDocumento14 pagineEspañol Charmillot Et DayerCarmen MondragónNessuna valutazione finora
- Guias TP 2009Documento63 pagineGuias TP 2009architeep0% (1)
- Procedimientos de La ConstrucciónDocumento23 pagineProcedimientos de La ConstrucciónJohan Muñoz Chaname0% (1)
- Curso ISO16142Documento32 pagineCurso ISO16142Raul Nuñez Brantes100% (1)
- C.S Moyopampa - I.S.H - 06.07Documento57 pagineC.S Moyopampa - I.S.H - 06.07JheisonLazaroMzaNessuna valutazione finora
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDa EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasValutazione: 4.5 su 5 stelle4.5/5 (14)
- Proyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadDa EverandProyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadValutazione: 5 su 5 stelle5/5 (1)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDa EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónValutazione: 5 su 5 stelle5/5 (1)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraDa EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraValutazione: 4.5 su 5 stelle4.5/5 (5)
- La causa raiz de los accidentes: Historias de accidentes en la industriaDa EverandLa causa raiz de los accidentes: Historias de accidentes en la industriaValutazione: 5 su 5 stelle5/5 (1)
- Manual técnico para la interpretación de análisis de suelos y fertilización de cultivosDa EverandManual técnico para la interpretación de análisis de suelos y fertilización de cultivosValutazione: 4 su 5 stelle4/5 (1)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialDa EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialValutazione: 4.5 su 5 stelle4.5/5 (10)
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosDa EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosValutazione: 5 su 5 stelle5/5 (5)
- Guía práctica para la refracción ocularDa EverandGuía práctica para la refracción ocularValutazione: 5 su 5 stelle5/5 (2)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDa EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalValutazione: 5 su 5 stelle5/5 (3)
- Inteligencia artificial: Análisis de datos e innovación para principiantesDa EverandInteligencia artificial: Análisis de datos e innovación para principiantesValutazione: 4 su 5 stelle4/5 (3)
- Ingeniería de Sonido. Conceptos, fundamentos y casos prácticos: CINE, TELEVISIÓN Y RADIODa EverandIngeniería de Sonido. Conceptos, fundamentos y casos prácticos: CINE, TELEVISIÓN Y RADIOValutazione: 4.5 su 5 stelle4.5/5 (8)
- Industria 4.0: La cuarta revolución industrialDa EverandIndustria 4.0: La cuarta revolución industrialValutazione: 4 su 5 stelle4/5 (1)
- Electrocardiograma desde una visión digitalDa EverandElectrocardiograma desde una visión digitalValutazione: 4 su 5 stelle4/5 (1)
- 100 circuitos de shields para arduino (español)Da Everand100 circuitos de shields para arduino (español)Valutazione: 3.5 su 5 stelle3.5/5 (3)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasDa EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasValutazione: 5 su 5 stelle5/5 (4)
- Cómo hacer aviones de papel y otros objetos voladoresDa EverandCómo hacer aviones de papel y otros objetos voladoresNessuna valutazione finora
- Investigación sistémica de accidentes: Modelo para el transporte y la gestión de riesgos en sistemas complejosDa EverandInvestigación sistémica de accidentes: Modelo para el transporte y la gestión de riesgos en sistemas complejosValutazione: 5 su 5 stelle5/5 (1)
- Didáctica de la matemática en la escuela primariaDa EverandDidáctica de la matemática en la escuela primariaValutazione: 2.5 su 5 stelle2.5/5 (3)