Potrebbero piacerti anche
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Valutazione: 2.5 su 5 stelle2.5/5 (3)
- QH331 Parts Manual 19-08-14 EnglishDocumento70 pagineQH331 Parts Manual 19-08-14 EnglishAdil Douzi100% (1)
- An Introduction To Brushless DC Motor ControlDocumento33 pagineAn Introduction To Brushless DC Motor ControlIgor TrimcevskiNessuna valutazione finora
- VT275 Diagnostico 2Documento318 pagineVT275 Diagnostico 2emmanuelNessuna valutazione finora
- Sr. No. Location Type TR Qty: Area SheetDocumento20 pagineSr. No. Location Type TR Qty: Area SheetNandan Raje100% (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDa EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNessuna valutazione finora
- KPC-Core Logging ManualDocumento44 pagineKPC-Core Logging ManualSupriyanto Drs0% (1)
- 0 Introduction To CE5108Documento7 pagine0 Introduction To CE5108Dicky DjayadiNessuna valutazione finora
- Ijert Ijert: Microcontroller Controlled BLDC Drive For Electric Vehicle Raju Yanamshetti, Juhi Nishat AnsariDocumento4 pagineIjert Ijert: Microcontroller Controlled BLDC Drive For Electric Vehicle Raju Yanamshetti, Juhi Nishat AnsariAvinash Babu KmNessuna valutazione finora
- Speed Control of Permanent Magnet Brushless DC Motor Using Fuzzy Logic Controller-Hardware ImplementationDocumento5 pagineSpeed Control of Permanent Magnet Brushless DC Motor Using Fuzzy Logic Controller-Hardware ImplementationSofyan AhmadiNessuna valutazione finora
- João M. Lemos, Rui Neves-Silva, José M. Igreja Auth. Adaptive Control of Solar Energy Collector SystemsDocumento261 pagineJoão M. Lemos, Rui Neves-Silva, José M. Igreja Auth. Adaptive Control of Solar Energy Collector Systemsftsebeek6164Nessuna valutazione finora
- Sensorless Control of A Brushless DC MotorDocumento7 pagineSensorless Control of A Brushless DC MotorTrong LeNessuna valutazione finora
- Arduino Based Sensorless Speed Control of BLDC Motor Using GSMDocumento6 pagineArduino Based Sensorless Speed Control of BLDC Motor Using GSMRaja Ramesh DNessuna valutazione finora
- High Performance Rectifier - Multilevel Inverter Based BLDC Motor Drive With PI ControllerDocumento16 pagineHigh Performance Rectifier - Multilevel Inverter Based BLDC Motor Drive With PI ControllerMohammed AltamimyNessuna valutazione finora
- Electric Vehicle A Controller of Brushless DC Motor ForDocumento6 pagineElectric Vehicle A Controller of Brushless DC Motor ForM MOHAMMED ARIEFNessuna valutazione finora
- Ramesh 2011Documento6 pagineRamesh 2011Hoang Hoang LeNessuna valutazione finora
- 5sensorlessBLDC PDFDocumento7 pagine5sensorlessBLDC PDFAlex CastilloNessuna valutazione finora
- PFC DC-DCDocumento8 paginePFC DC-DCmanda RamuNessuna valutazione finora
- BLDC Sepic Motor Torque ControlDocumento60 pagineBLDC Sepic Motor Torque ControlSuresh SsbnNessuna valutazione finora
- Modelling and Simulation of Three Phase BLDC Motor For Electric Braking Using Matlab/SimulinkDocumento6 pagineModelling and Simulation of Three Phase BLDC Motor For Electric Braking Using Matlab/Simulinkadane gashuNessuna valutazione finora
- New Sensorless Commutation Technique For Brushless DC MotorsDocumento10 pagineNew Sensorless Commutation Technique For Brushless DC MotorsUmai BalanNessuna valutazione finora
- IJETR031989Documento5 pagineIJETR031989erpublicationNessuna valutazione finora
- Torque Ripple Minimization in BLDC Motor Using DC-DC Sepic ConverterDocumento5 pagineTorque Ripple Minimization in BLDC Motor Using DC-DC Sepic ConverterShiju RamachandranNessuna valutazione finora
- Sensorless Speed Control of Brushless DCDocumento5 pagineSensorless Speed Control of Brushless DCekrem kayaNessuna valutazione finora
- BLDC Motor Open Loop ControlDocumento20 pagineBLDC Motor Open Loop ControlShiva SuryaNessuna valutazione finora
- Speed Control of Brushless DC Motor Using Zeta ConverterDocumento7 pagineSpeed Control of Brushless DC Motor Using Zeta ConverterRicard Alfredo PurbaNessuna valutazione finora
- Feed Forward Controller For Compensation of DC-Link Capacitor Unbalance Voltages and Ripple Reduction Based BLDCM Drive SystemDocumento6 pagineFeed Forward Controller For Compensation of DC-Link Capacitor Unbalance Voltages and Ripple Reduction Based BLDCM Drive SystemSiddharth Jayashekar KNessuna valutazione finora
- BLDC1Documento5 pagineBLDC1elabam39Nessuna valutazione finora
- Direct Torque Control of Brushless DC Motor: With Non-Sinusoidal Back-EMFDocumento7 pagineDirect Torque Control of Brushless DC Motor: With Non-Sinusoidal Back-EMFGenaro Bessa CeppoNessuna valutazione finora
- 2Documento6 pagine2Sairam SaiNessuna valutazione finora
- A Brushless DC Motor Drive With Power Factor Correction Using Isolated Zeta ConverterDocumento9 pagineA Brushless DC Motor Drive With Power Factor Correction Using Isolated Zeta ConverterGangadhar AkkiNessuna valutazione finora
- A Review Paper On Torque Ripple Reduction and Power Quality Improvement in Brushless DC Motor PDFDocumento9 pagineA Review Paper On Torque Ripple Reduction and Power Quality Improvement in Brushless DC Motor PDFsethukumarkNessuna valutazione finora
- 6 11, Tesma103, IJEASTDocumento6 pagine6 11, Tesma103, IJEASTaditya317crazyNessuna valutazione finora
- Performance Analysis of BLDC Motor Using Basic Switching ConvertersDocumento4 paginePerformance Analysis of BLDC Motor Using Basic Switching Converterscool coolNessuna valutazione finora
- Ver 1 Boost Converter Fed High Performance BLDC For SPV Air Cooling SystemDocumento14 pagineVer 1 Boost Converter Fed High Performance BLDC For SPV Air Cooling SystemD SHOBHA RANINessuna valutazione finora
- 1 Chapter1 PDFDocumento66 pagine1 Chapter1 PDFANJANA K SNessuna valutazione finora
- Basic BLDC ControllerDocumento9 pagineBasic BLDC ControllerRen KiyoshiiNessuna valutazione finora
- Regenerative Hybrid Automobile ReportDocumento67 pagineRegenerative Hybrid Automobile ReportRajat KapoorNessuna valutazione finora
- Speed Control of Brushless DC Motor With DSP Controller Using MatlabDocumento6 pagineSpeed Control of Brushless DC Motor With DSP Controller Using MatlabramjiNessuna valutazione finora
- Reduction of Harmonic Distortions in BLDC Motor Power Supply Using SEPIC ConverterDocumento6 pagineReduction of Harmonic Distortions in BLDC Motor Power Supply Using SEPIC ConverterRahardian TristantoNessuna valutazione finora
- Robotic Motors 3Documento4 pagineRobotic Motors 3shashank gowdaNessuna valutazione finora
- Field Oriented Control For Space Vector Modulation Based Brushless DC Motor DriveDocumento8 pagineField Oriented Control For Space Vector Modulation Based Brushless DC Motor DriveSushant MandalNessuna valutazione finora
- Evaluation and Comparative Analysis of Speed Performance of Brushless DC Motor Using Digital ControllersDocumento20 pagineEvaluation and Comparative Analysis of Speed Performance of Brushless DC Motor Using Digital ControllersIJRASETPublicationsNessuna valutazione finora
- Model Reference Neural Adaptive Control Based BLDC Motor Speed ControlDocumento6 pagineModel Reference Neural Adaptive Control Based BLDC Motor Speed ControlwaweeNessuna valutazione finora
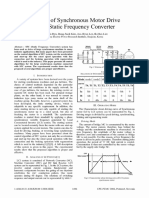
- A Study of Synchronous Motor Drive Using SFC PDFDocumento4 pagineA Study of Synchronous Motor Drive Using SFC PDFBrian GuevaraNessuna valutazione finora
- PMBLDC-Simulink - Permanent Magnet Brushless DC Motor Simulink Model.Documento5 paginePMBLDC-Simulink - Permanent Magnet Brushless DC Motor Simulink Model.Kidus DawitNessuna valutazione finora
- SynopsisDocumento11 pagineSynopsissunil kumarNessuna valutazione finora
- PWM Switching Strategy For Torque Ripple Minimization in BLDC MotorDocumento6 paginePWM Switching Strategy For Torque Ripple Minimization in BLDC MotorekaliappanNessuna valutazione finora
- Microcontroller Based PMDC Motor Control For Driving 0.5KW ScooterDocumento5 pagineMicrocontroller Based PMDC Motor Control For Driving 0.5KW ScootermainNessuna valutazione finora
- REPS 12 PaperDocumento7 pagineREPS 12 PaperbharathesecNessuna valutazione finora
- A New Topology For Unipolar Brushless DC Motor Drive With High Power FactorDocumento8 pagineA New Topology For Unipolar Brushless DC Motor Drive With High Power FactorRagunathan NarayananNessuna valutazione finora
- Position and Speed Control of BLDC Motor Using Hall Sensor IJERTCONV3IS32015Documento3 paginePosition and Speed Control of BLDC Motor Using Hall Sensor IJERTCONV3IS32015DONE AND DUSTEDNessuna valutazione finora
- BLDC Motor With Speed Control With RPM DisplayDocumento16 pagineBLDC Motor With Speed Control With RPM DisplayVõ Đức HuyNessuna valutazione finora
- 1.1 Voltage Source Converters (VSC) : TH THDocumento12 pagine1.1 Voltage Source Converters (VSC) : TH THSherif M. DabourNessuna valutazione finora
- Micrcontroller Based Cyclo Converter Using Thyristors: Fig. 1 CycloconverterDocumento32 pagineMicrcontroller Based Cyclo Converter Using Thyristors: Fig. 1 Cycloconverterपंकज काळेNessuna valutazione finora
- Gopal Gupta 2K20PES09-1Documento18 pagineGopal Gupta 2K20PES09-1Kritu Gupta100% (1)
- 3 111-04 PDFDocumento6 pagine3 111-04 PDFsethukumarkNessuna valutazione finora
- Diode Clamped Multilevel Inverter Fed BLDC Motor Using SEPIC ConverterDocumento5 pagineDiode Clamped Multilevel Inverter Fed BLDC Motor Using SEPIC Convertermanoj kumarNessuna valutazione finora
- Analysis of Open Loop Speed Control of Brushless DC Motor: Kajal D. Parsana, Hitesh M. KarkarDocumento4 pagineAnalysis of Open Loop Speed Control of Brushless DC Motor: Kajal D. Parsana, Hitesh M. Karkarngnr_gull1952Nessuna valutazione finora
- Iceets 2013 6533563Documento9 pagineIceets 2013 6533563Steni MoaiNessuna valutazione finora
- Implementation of Boost Converter Applied For DC Motor DriveDocumento51 pagineImplementation of Boost Converter Applied For DC Motor DriveLeri FirdianNessuna valutazione finora
- A New Topology For Unipolar Brushless DC Motor DriveDocumento55 pagineA New Topology For Unipolar Brushless DC Motor Drivesrikaanth06Nessuna valutazione finora
- CanonicalDocumento7 pagineCanonicalTechnos_IncNessuna valutazione finora
- Performance of BLDC Motor Speed Control Based On Hysteresis Current Control MechanismDocumento6 paginePerformance of BLDC Motor Speed Control Based On Hysteresis Current Control MechanismDEBARATI DAMNessuna valutazione finora
- Induction Motor Control by Vector Control Method.: Miss. Bhagyashree Thool, Miss. Kalyani C. WakhareDocumento6 pagineInduction Motor Control by Vector Control Method.: Miss. Bhagyashree Thool, Miss. Kalyani C. WakhareASumeethKumarNessuna valutazione finora
- Johnson Matthey - Using PEST Analysis To Support Decision MakingDocumento5 pagineJohnson Matthey - Using PEST Analysis To Support Decision MakingHarry Josua TampubolonNessuna valutazione finora
- Machine Drawing Digital Material PPT ASHOKDocumento76 pagineMachine Drawing Digital Material PPT ASHOKashok junapudiNessuna valutazione finora
- 1 Ton Gran Max: The Ideal WorkhorseDocumento12 pagine1 Ton Gran Max: The Ideal WorkhorseagungNessuna valutazione finora
- Safe and Economical Engine Operation: Wärtsilä Training Training - Pakistan NavyDocumento10 pagineSafe and Economical Engine Operation: Wärtsilä Training Training - Pakistan NavyfaisalnadimNessuna valutazione finora
- McqsDocumento13 pagineMcqssezulfiqarNessuna valutazione finora
- Boitier de Commande PDFDocumento4 pagineBoitier de Commande PDFAnonymous oDi9mLNessuna valutazione finora
- Sunon DC Fans Maglev CatalogueDocumento74 pagineSunon DC Fans Maglev CatalogueRadio Parts100% (3)
- WS Services Pipe Fittings & Its Reference PDFDocumento1 paginaWS Services Pipe Fittings & Its Reference PDFbilal almelegyNessuna valutazione finora
- Usn 1Documento285 pagineUsn 1Naveen PrabhuNessuna valutazione finora
- Mechanics of Materials Lab Fall 2018Documento52 pagineMechanics of Materials Lab Fall 2018Hammad RazaNessuna valutazione finora
- Cold and Dry Climatic Zone of IndiaDocumento16 pagineCold and Dry Climatic Zone of IndiaAnirudh BabbarNessuna valutazione finora
- Sub 03 026Documento54 pagineSub 03 026surag1982Nessuna valutazione finora
- Sad LaypDocumento8 pagineSad LaypEdwin Quinlat DevizaNessuna valutazione finora
- Input-Output Structure of The FlowsheetDocumento43 pagineInput-Output Structure of The FlowsheethammadNessuna valutazione finora
- Mdp36 The EndDocumento42 pagineMdp36 The Endnanog36Nessuna valutazione finora
- SSCWG7 Repan3 Convers Fact Solar CollectorsDocumento3 pagineSSCWG7 Repan3 Convers Fact Solar CollectorsMeng SunNessuna valutazione finora
- Cylinder Rating FormDocumento5 pagineCylinder Rating FormAry KageNessuna valutazione finora
- Product Manual 26098 (Revision NEW) : LCS Series Integrated Speed ControlDocumento20 pagineProduct Manual 26098 (Revision NEW) : LCS Series Integrated Speed ControlmichaeltibocheNessuna valutazione finora
- Bill No. 1 - Fixed FurnitureDocumento6 pagineBill No. 1 - Fixed FurnitureMohammad Fadhil EmamdhullyNessuna valutazione finora
- Aw-Sd130 150 SS SMDocumento36 pagineAw-Sd130 150 SS SMDiana MarzukiNessuna valutazione finora
- Honda NSR250 MC21-28 Crankshaft AssemblyDocumento1 paginaHonda NSR250 MC21-28 Crankshaft AssemblyShahrizal OmarNessuna valutazione finora
- App 710Documento20 pagineApp 710Sueli E FranciscoNessuna valutazione finora
- Heating System Design (Student)Documento25 pagineHeating System Design (Student)markbrennan1Nessuna valutazione finora
- Control Room EngineerDocumento2 pagineControl Room Engineertajshah283Nessuna valutazione finora