Potrebbero piacerti anche
- Lecture17 RoutingDocumento51 pagineLecture17 Routingapi-3834272Nessuna valutazione finora
- Lecture23 dr3Documento37 pagineLecture23 dr3api-3834272Nessuna valutazione finora
- Week 5 Lecture MaterialDocumento88 pagineWeek 5 Lecture MaterialAnupam DasNessuna valutazione finora
- Week 3 Lecture Material Isg PDFDocumento105 pagineWeek 3 Lecture Material Isg PDFAkhendra KumarNessuna valutazione finora
- Gaussian Random Number Generator Using Boxmuller MethodDocumento27 pagineGaussian Random Number Generator Using Boxmuller MethodAbhijeet Singh KatiyarNessuna valutazione finora
- Lec 10 Combinational Logic CircuitsDocumento59 pagineLec 10 Combinational Logic CircuitsNaim UddinNessuna valutazione finora
- Lecture18 GRDocumento36 pagineLecture18 GRapi-3834272Nessuna valutazione finora
- Lecture21 dr1Documento31 pagineLecture21 dr1api-3834272Nessuna valutazione finora
- Digital Integrated Circuits: A Design PerspectiveDocumento113 pagineDigital Integrated Circuits: A Design Perspectiveapi-127299018Nessuna valutazione finora
- MOS Layers: Four Basic Layers N-Diffusion P-Diffusion Polysilicon MetalDocumento12 pagineMOS Layers: Four Basic Layers N-Diffusion P-Diffusion Polysilicon MetalNivedita Shettar100% (1)
- Lecture22 dr2Documento37 pagineLecture22 dr2api-3834272Nessuna valutazione finora
- Unit 5 - A CASE STUDY - Using Pic MicrocontrollerDocumento33 pagineUnit 5 - A CASE STUDY - Using Pic MicrocontrollerPoonthalirNessuna valutazione finora
- Lecture8 Floorplan2Documento34 pagineLecture8 Floorplan2api-3834272Nessuna valutazione finora
- Introduction To VLSI DesignDocumento33 pagineIntroduction To VLSI DesignAnonymous P9xMOgEYt1Nessuna valutazione finora
- VLSI Design Question BankDocumento10 pagineVLSI Design Question Bankbooks babuNessuna valutazione finora
- Chapter 12Documento107 pagineChapter 12Gautham AnebajaganeNessuna valutazione finora
- Lecture12 Placement 3Documento51 pagineLecture12 Placement 3api-3834272Nessuna valutazione finora
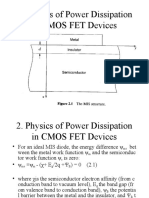
- Physics of Power Dissipation in CMOS FET DevicesDocumento70 paginePhysics of Power Dissipation in CMOS FET DevicesPunith Gowda M BNessuna valutazione finora
- Lecture 5Documento47 pagineLecture 5Ershad ShaikNessuna valutazione finora
- Final Vls I Project ReportDocumento5 pagineFinal Vls I Project Reportgaurav_amuNessuna valutazione finora
- Lecture5 PartitionspectralDocumento14 pagineLecture5 Partitionspectralapi-3834272Nessuna valutazione finora
- Vlsi ch1Documento64 pagineVlsi ch1Nihar ranjan AditNessuna valutazione finora
- Level 54 Bsim4Documento13 pagineLevel 54 Bsim4Georgios SarrisNessuna valutazione finora
- Formal Verification:: Sat BDDS, Symbolic Model Checking With BDDS, Model Checking Using Sat, Equivalence CheckingDocumento52 pagineFormal Verification:: Sat BDDS, Symbolic Model Checking With BDDS, Model Checking Using Sat, Equivalence CheckingNavathej BangariNessuna valutazione finora
- Complex GateDocumento44 pagineComplex Gatemisbahforu09Nessuna valutazione finora
- Lecture 5 - CMOS Transistor TheoryDocumento44 pagineLecture 5 - CMOS Transistor Theorysadia santaNessuna valutazione finora
- Latch Versus RegisterDocumento23 pagineLatch Versus RegisterSGSNessuna valutazione finora
- Mod1VLSI TECHNOLOGY1Documento65 pagineMod1VLSI TECHNOLOGY1Jomon VargheseNessuna valutazione finora
- Systemc-Ams Tutorial: Institute of Computer Technology Vienna University of Technology Markus DammDocumento26 pagineSystemc-Ams Tutorial: Institute of Computer Technology Vienna University of Technology Markus DammAamir HabibNessuna valutazione finora
- Layout Design RulesDocumento28 pagineLayout Design RulesmohanrajNessuna valutazione finora
- 24 LFSRDocumento24 pagine24 LFSRAbdul RajakNessuna valutazione finora
- Lecture1 IntroDocumento35 pagineLecture1 Introapi-3834272Nessuna valutazione finora
- Layout Lec 04 Techniques v01Documento76 pagineLayout Lec 04 Techniques v01Ahmed MetwalyNessuna valutazione finora
- Resistor IC Design LayoutDocumento120 pagineResistor IC Design LayoutTimothyAmadoNessuna valutazione finora
- Cmos LayoutDocumento13 pagineCmos LayoutshastryNessuna valutazione finora
- ESD FullDocumento932 pagineESD FullSlaney AguiarNessuna valutazione finora
- EN315-07 Euler LayoutDocumento43 pagineEN315-07 Euler Layoutpreet786Nessuna valutazione finora
- DOST-ASTI Electric Manual PDFDocumento17 pagineDOST-ASTI Electric Manual PDFJB NavarroNessuna valutazione finora
- Eric Thesis SlidesDocumento43 pagineEric Thesis SlidesHumberto JuniorNessuna valutazione finora
- Why VLSI? - Moore's Law. - The VLSI Design ProcessDocumento28 pagineWhy VLSI? - Moore's Law. - The VLSI Design Processlim hyNessuna valutazione finora
- Hspice Simulation of SRAM PDFDocumento65 pagineHspice Simulation of SRAM PDFYatheesh KaggereNessuna valutazione finora
- Latches&FlipflopsDocumento20 pagineLatches&FlipflopsAjay G Bellam100% (1)
- Analog Power Management Ic Design CopecDocumento535 pagineAnalog Power Management Ic Design Copec王彦威Nessuna valutazione finora
- A Memory-Based FFT Processor Design With Generalized EfficientDocumento5 pagineA Memory-Based FFT Processor Design With Generalized Efficientrajesh.v.v.kNessuna valutazione finora
- IP Addressing Scheme (Topic 4) : TextbookDocumento37 pagineIP Addressing Scheme (Topic 4) : TextbookMin Hein HtetNessuna valutazione finora
- Lec14 DTMOSDocumento88 pagineLec14 DTMOSSalim SanNessuna valutazione finora
- EE-323 (3+1) Topics: Instrument Types & Chapter # 3 Department of Electrical Engineering, WECDocumento15 pagineEE-323 (3+1) Topics: Instrument Types & Chapter # 3 Department of Electrical Engineering, WECAsad SaeedNessuna valutazione finora
- CMOS Process FlowDocumento35 pagineCMOS Process Flowag21937570Nessuna valutazione finora
- LCDF4 Chap 03 P1Documento33 pagineLCDF4 Chap 03 P1Parikshit KadamNessuna valutazione finora
- Asynchronous Sequential CircuitsDocumento168 pagineAsynchronous Sequential CircuitsLatif KhanNessuna valutazione finora
- Single-Mask Double-Patterning Lithography: Rani S. Ghaida, George Torres, and Puneet GuptaDocumento21 pagineSingle-Mask Double-Patterning Lithography: Rani S. Ghaida, George Torres, and Puneet GuptaRenju TjNessuna valutazione finora
- Jin FinalDocumento23 pagineJin FinalrajsrinidhiNessuna valutazione finora
- Lecture 7 - CMOS DC - Transient ResponseDocumento40 pagineLecture 7 - CMOS DC - Transient Responsesadia santaNessuna valutazione finora
- Selected Design Topics: Logic and Computer Design FundamentalsDocumento15 pagineSelected Design Topics: Logic and Computer Design FundamentalsYawar Abbas KhanNessuna valutazione finora
- MosfetDocumento15 pagineMosfetDr-Sanjeev KashyapNessuna valutazione finora
- Signal and Design Integrity: Cadence Design Systems, IncDocumento56 pagineSignal and Design Integrity: Cadence Design Systems, IncJyothi Nath100% (1)
- Analog FlowDocumento55 pagineAnalog FlowRameshNessuna valutazione finora
- Stick Diagram BasicsDocumento26 pagineStick Diagram Basicssanju012100% (1)
- 07 PartitioningDocumento10 pagine07 PartitioningBruhath KotamrajuNessuna valutazione finora
- Physical Design 1Documento40 paginePhysical Design 1john8880Nessuna valutazione finora
- A New CMOS Implementation For Miniaturized Active RFID Insect Tag and VHF Insect TrackingDocumento13 pagineA New CMOS Implementation For Miniaturized Active RFID Insect Tag and VHF Insect TrackingAkhendra KumarNessuna valutazione finora
- Lecture 23 Tutorial2Documento2 pagineLecture 23 Tutorial2Akhendra KumarNessuna valutazione finora
- Cmos Manufacturing Process: Digital Integrated Circuits EE141Documento28 pagineCmos Manufacturing Process: Digital Integrated Circuits EE141Samar_Ansari_7373Nessuna valutazione finora
- Lecture 37 Tutorial6 PDFDocumento4 pagineLecture 37 Tutorial6 PDFAkhendra KumarNessuna valutazione finora
- Lecture 44 (Part B) Tutorial7 PDFDocumento3 pagineLecture 44 (Part B) Tutorial7 PDFAkhendra KumarNessuna valutazione finora
- Lecture 25 Tutorial3 PDFDocumento2 pagineLecture 25 Tutorial3 PDFAkhendra KumarNessuna valutazione finora
- Lecture 31 Tutorial5 PDFDocumento7 pagineLecture 31 Tutorial5 PDFAkhendra KumarNessuna valutazione finora
- Lecture 36 Quiz2 - 07 PDFDocumento1 paginaLecture 36 Quiz2 - 07 PDFAkhendra KumarNessuna valutazione finora
- RF & Microwaves - Material PDFDocumento15 pagineRF & Microwaves - Material PDFAkhendra KumarNessuna valutazione finora
- CFD I MaterialDocumento37 pagineCFD I MaterialAkhendra KumarNessuna valutazione finora
- CFD II, Turbulent and High Mach Number Flow: MinicourseDocumento19 pagineCFD II, Turbulent and High Mach Number Flow: MinicourseAkhendra KumarNessuna valutazione finora
- Chemical Reaction Engg MaterialDocumento26 pagineChemical Reaction Engg MaterialAkhendra KumarNessuna valutazione finora
- Ofdm Tranmission Reception PDFDocumento7 pagineOfdm Tranmission Reception PDFKashyap GadaNessuna valutazione finora
- ACDCModule Material PDFDocumento48 pagineACDCModule Material PDFAkhendra KumarNessuna valutazione finora
- Common Mode Feedback and Differential AmplifiersDocumento71 pagineCommon Mode Feedback and Differential Amplifiersreader_188Nessuna valutazione finora
- Feedback in AmplifiersDocumento29 pagineFeedback in AmplifiersanjugaduNessuna valutazione finora
- Chapter 1Documento34 pagineChapter 1Akhendra KumarNessuna valutazione finora
- Wiley .Verilog - Coding.for - Logic.synthesis. (2003)Documento334 pagineWiley .Verilog - Coding.for - Logic.synthesis. (2003)Nguyễn Hồ Nguyên Vũ100% (12)
- PaperDocumento6 paginePaperAkhendra KumarNessuna valutazione finora
- Chapter2 PDFDocumento40 pagineChapter2 PDFjagadeeshNessuna valutazione finora
- Hardware Implementation and VLSI Design of Spectrum Sensor For Next-Generation LTE-A Cognitive-Radio Wireless NetworkDocumento9 pagineHardware Implementation and VLSI Design of Spectrum Sensor For Next-Generation LTE-A Cognitive-Radio Wireless NetworkAkhendra KumarNessuna valutazione finora
- Today's Topic: Integrated Devices and Modeling (With Focus On MOS Transistor) (Chapter 1)Documento52 pagineToday's Topic: Integrated Devices and Modeling (With Focus On MOS Transistor) (Chapter 1)Akhendra KumarNessuna valutazione finora
- Integrated Square-Shaped Spiral Inductor: Model DefinitionDocumento9 pagineIntegrated Square-Shaped Spiral Inductor: Model DefinitionAkhendra KumarNessuna valutazione finora
- Fpga Based 32 Bit Risc ProcessorDocumento18 pagineFpga Based 32 Bit Risc ProcessorAkhendra KumarNessuna valutazione finora
- Week 1 Lecture MaterialDocumento96 pagineWeek 1 Lecture Materialsaigdv1978Nessuna valutazione finora
- 32bit RISC CPU Based On MIPS Using VHDLDocumento9 pagine32bit RISC CPU Based On MIPS Using VHDLAkhendra KumarNessuna valutazione finora
- 32bit RISC CPU Based On MIPS Using VHDL PDFDocumento93 pagine32bit RISC CPU Based On MIPS Using VHDL PDFAkhendra KumarNessuna valutazione finora
- Week 4 Lecture Material PDFDocumento122 pagineWeek 4 Lecture Material PDFAkhendra KumarNessuna valutazione finora
- Ai Mod2Documento33 pagineAi Mod2SapnaNessuna valutazione finora
- Aiml DocxDocumento11 pagineAiml DocxWbn tournamentsNessuna valutazione finora
- 05 1 Optimization Methods NDPDocumento85 pagine05 1 Optimization Methods NDPSebastian LorcaNessuna valutazione finora
- Algorithms For The Design of A Multi-Stage Adaptive Kanban SystemDocumento33 pagineAlgorithms For The Design of A Multi-Stage Adaptive Kanban SystemKharisma ElanNessuna valutazione finora
- Response Surface Methodology: October 2004Documento33 pagineResponse Surface Methodology: October 2004Odoemenem AnthonyNessuna valutazione finora
- 1999 A Genetic Algorithm For Minimizing The Makespan in The Case of Scheduling Identical Parallel MachinesDocumento5 pagine1999 A Genetic Algorithm For Minimizing The Makespan in The Case of Scheduling Identical Parallel Machinesimran_chaudhryNessuna valutazione finora
- Cooperative and Adaptive Algorithms: Pouya Mehrannia, Fall 2021 Week 4Documento22 pagineCooperative and Adaptive Algorithms: Pouya Mehrannia, Fall 2021 Week 4JennyNessuna valutazione finora
- VLSI Cell PlacementDocumento78 pagineVLSI Cell Placementdharma_panga8217Nessuna valutazione finora
- Community Detection in Social Networks An OverviewDocumento6 pagineCommunity Detection in Social Networks An OverviewInternational Journal of Research in Engineering and TechnologyNessuna valutazione finora
- AI (Chap 3&4)Documento182 pagineAI (Chap 3&4)Ifra fatimaNessuna valutazione finora
- CH332 L3 Emin PDFDocumento17 pagineCH332 L3 Emin PDFkdsarodeNessuna valutazione finora
- 11-2001-Application of Tabu Search To Optimal Placement of Distributed GeneratorsDocumento6 pagine11-2001-Application of Tabu Search To Optimal Placement of Distributed GeneratorsAbbas DivianNessuna valutazione finora
- Metaheuristics - The Metaphor ExposedDocumento20 pagineMetaheuristics - The Metaphor ExposedArdeshir BahreininejadNessuna valutazione finora
- Hill Climbing Algorithm in AIDocumento5 pagineHill Climbing Algorithm in AIAfaque AlamNessuna valutazione finora
- Cpts 440 / 540 Artificial Intelligence: SearchDocumento182 pagineCpts 440 / 540 Artificial Intelligence: SearchSurekha SakhareNessuna valutazione finora
- Genetic Algorithms in Induction Motor Efficiency DeterminationDocumento78 pagineGenetic Algorithms in Induction Motor Efficiency DeterminationKean PagnaNessuna valutazione finora
- Heuristic SearchDocumento49 pagineHeuristic SearchsaikiranNessuna valutazione finora
- Donald C Dilworth - Lense Design-IOP Publishing LTD (2018)Documento526 pagineDonald C Dilworth - Lense Design-IOP Publishing LTD (2018)pakop86055Nessuna valutazione finora
- Parasplit: A Scalable Architecture On Fpga For Terabit Packet ClassificationDocumento8 pagineParasplit: A Scalable Architecture On Fpga For Terabit Packet ClassificationDevNessuna valutazione finora
- Handout 15 (Introduction To Non-Traditional Optimization Techniques)Documento4 pagineHandout 15 (Introduction To Non-Traditional Optimization Techniques)Kumar GauravNessuna valutazione finora
- AI FinalExamDocumento5 pagineAI FinalExamAhmed AdelNessuna valutazione finora
- Travelling Salesman Problem in JavaDocumento23 pagineTravelling Salesman Problem in JavaajhiredNessuna valutazione finora
- Berthing PlanDocumento44 pagineBerthing PlanPatel Tushar100% (1)
- Cross DockingDocumento7 pagineCross DockingMariusCristian LucaNessuna valutazione finora
- A Review On Yard Management in Container TerminalsDocumento17 pagineA Review On Yard Management in Container TerminalsBui kienNessuna valutazione finora
- BibliographyDocumento1.043 pagineBibliographyAshutosh ShakyaNessuna valutazione finora
- Path Optimization in 3D Printer: Algorithms and Experimentation SystemDocumento6 paginePath Optimization in 3D Printer: Algorithms and Experimentation SystemfelipeNessuna valutazione finora
- Intelligent Optimisation Techniques. Genetic Algorithms, Tabu Search, Simulated Annealing and Neural Networks (PDDocumento308 pagineIntelligent Optimisation Techniques. Genetic Algorithms, Tabu Search, Simulated Annealing and Neural Networks (PDrorrito33Nessuna valutazione finora
- Chapter 3 HeuristicDocumento56 pagineChapter 3 HeuristicTrần Quốc KhangNessuna valutazione finora
- Lab Manual For All WeeksDocumento6 pagineLab Manual For All WeeksAryan KhanNessuna valutazione finora