Potrebbero piacerti anche
- Future: Want Program Programmer That Programmer Unit's of inDocumento9 pagineFuture: Want Program Programmer That Programmer Unit's of indinotronNessuna valutazione finora
- AT90S8535 Programmer: Suitable For In-System UseDocumento3 pagineAT90S8535 Programmer: Suitable For In-System UseTariq ZuhlufNessuna valutazione finora
- LTC4006EGN-6, 8.4V2A Li-Ion Battery Charger PDFDocumento1 paginaLTC4006EGN-6, 8.4V2A Li-Ion Battery Charger PDFAndyNessuna valutazione finora
- Invertor LCD OZ9601SDocumento1 paginaInvertor LCD OZ9601SRenatoMaia100% (1)
- Circuit diagram of an RF band-1 moduleDocumento11 pagineCircuit diagram of an RF band-1 moduleEdgar Jose Aranguibel MorilloNessuna valutazione finora
- Vin Vout: TP13 TP13 TP12 TP12 TP14 TP14 TP15 TP15Documento1 paginaVin Vout: TP13 TP13 TP12 TP12 TP14 TP14 TP15 TP15Varun Kumar ChillaNessuna valutazione finora
- Tascam 238 Capstan Servo Motor Circuit DiagramDocumento1 paginaTascam 238 Capstan Servo Motor Circuit DiagramOKUDA SotaroNessuna valutazione finora
- DVD Noblex Dvd-1350: 3828 Control Borad SechmaticDocumento15 pagineDVD Noblex Dvd-1350: 3828 Control Borad SechmaticMariano Ohienart100% (1)
- Op IFDocumento12 pagineOp IFdesignNessuna valutazione finora
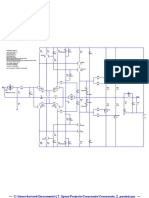
- Crescendo PDFDocumento1 paginaCrescendo PDFindra_idroNessuna valutazione finora
- STEVAL-SPIN3202: STSPIN32F0A Advanced 3-Phase BLDC Driver With Embedded STM32 MCU Single Shunt Evaluation BoardDocumento7 pagineSTEVAL-SPIN3202: STSPIN32F0A Advanced 3-Phase BLDC Driver With Embedded STM32 MCU Single Shunt Evaluation Boardedst_tadNessuna valutazione finora
- Mackie Profx16 Usb Codec SchematicDocumento1 paginaMackie Profx16 Usb Codec SchematicRULY BRAMSNessuna valutazione finora
- Mackie ProFX16 USB Codec SchematicDocumento1 paginaMackie ProFX16 USB Codec SchematicJames MontalvoNessuna valutazione finora
- 4 Hilux: ChargingDocumento1 pagina4 Hilux: ChargingautocomtrucksNessuna valutazione finora
- Schematic diagram of USB to serial converter circuitDocumento1 paginaSchematic diagram of USB to serial converter circuitAugustoferreira Ferreira100% (3)
- Mod Apex B500: - C:/Users/GX14000/Desktop/APEX B500 STD TEF - AscDocumento1 paginaMod Apex B500: - C:/Users/GX14000/Desktop/APEX B500 STD TEF - AscLek SarbiniNessuna valutazione finora
- Modelos AntigosDocumento9 pagineModelos AntigosGabriel de LimaNessuna valutazione finora
- NCP1203D (203D6) - Ba9741f Ipboard TPV Pwpc1942aua11p (715G1492-1)Documento2 pagineNCP1203D (203D6) - Ba9741f Ipboard TPV Pwpc1942aua11p (715G1492-1)Maria Perez100% (1)
- 100V-240V Woshine Machine Motor Driver-DiagrameDocumento1 pagina100V-240V Woshine Machine Motor Driver-DiagrameWasantha MunasinghaNessuna valutazione finora
- Paso A PasaDocumento1 paginaPaso A PasaAlejandro Teruggi100% (1)
- Universitaet Wuppertal, Fb-Esheetmatr - Nr.Namescalesizerevcad-Technikencade (Prof - Dr.-Ing Moelle)Documento1 paginaUniversitaet Wuppertal, Fb-Esheetmatr - Nr.Namescalesizerevcad-Technikencade (Prof - Dr.-Ing Moelle)abdo Zinneddine100% (1)
- Audio amplifier circuit diagram analysisDocumento1 paginaAudio amplifier circuit diagram analysisIgor MNessuna valutazione finora
- Untitled2 PDFDocumento1 paginaUntitled2 PDFRenzoRiveroNessuna valutazione finora
- PX-680 D06 SchematicDocumento1 paginaPX-680 D06 SchematicReycomlab S.ANessuna valutazione finora
- 501 SCHDocumento3 pagine501 SCHLeandro DiasNessuna valutazione finora
- Fuzz Factory 11 Knob Clone Manual V1Documento4 pagineFuzz Factory 11 Knob Clone Manual V1gilgoosNessuna valutazione finora
- Service Manual: Wireless AmplifierDocumento60 pagineService Manual: Wireless AmplifiergermieNessuna valutazione finora
- SCH_E15 & E25_input_A (p1) Iss4 (Phase Inverted + bar version) (Schematic Design)Documento1 paginaSCH_E15 & E25_input_A (p1) Iss4 (Phase Inverted + bar version) (Schematic Design)free_manualNessuna valutazione finora
- NKS PK-5000 PK-1000Documento15 pagineNKS PK-5000 PK-1000FRANK NIELE DE OLIVEIRANessuna valutazione finora
- Psdr2 GuideDocumento1 paginaPsdr2 GuidemarcusNessuna valutazione finora
- NKS PK-5000 PK-1000Documento15 pagineNKS PK-5000 PK-1000ala sousa LimaNessuna valutazione finora
- NKS PK5000 PK1000Documento15 pagineNKS PK5000 PK1000Adilson RochaNessuna valutazione finora
- Company Name:Guangzhou Mingo Feijun Electronic Co., LTD Model No: PK 1000Documento15 pagineCompany Name:Guangzhou Mingo Feijun Electronic Co., LTD Model No: PK 1000OdimarNessuna valutazione finora
- NKS PK5000 PK1000Documento15 pagineNKS PK5000 PK1000Flavio de sousa oliveiraNessuna valutazione finora
- NKS PK5000 PK1000Documento15 pagineNKS PK5000 PK1000Flavio de sousa oliveiraNessuna valutazione finora
- NKS PK-5000 PK-1000Documento15 pagineNKS PK-5000 PK-1000Wagner LucianoNessuna valutazione finora
- Fonte PL3 EsquematicoDocumento1 paginaFonte PL3 EsquematicoJunior FilhoNessuna valutazione finora
- DS7240V2 Control PanelDocumento6 pagineDS7240V2 Control PanelForward MyanmarNessuna valutazione finora
- Micro ScheDocumento1 paginaMicro Schetradingview9339Nessuna valutazione finora
- SB2040 SchematicDocumento1 paginaSB2040 Schematiccacalot93100% (1)
- Installation Instructions For BVT-250 and BVR-250: Introduction To The Series 250Documento3 pagineInstallation Instructions For BVT-250 and BVR-250: Introduction To The Series 250pawa100% (1)
- SIM808 LoNet Design SchematicDocumento1 paginaSIM808 LoNet Design SchematicMcDominiNessuna valutazione finora
- MT1389E DVD Demo BoardDocumento4 pagineMT1389E DVD Demo BoardEnya Andrea Ribba Hernandez100% (1)
- H DVD5031 NDocumento16 pagineH DVD5031 NSerp1972Nessuna valutazione finora
- Picprog CircuitDocumento1 paginaPicprog Circuitmiguel709100% (1)
- USB type C to USB 2.0 and microcontroller core functionsDocumento1 paginaUSB type C to USB 2.0 and microcontroller core functionsDaniel BaronNessuna valutazione finora
- USB type C to USB 2.0 and microcontroller core functionsDocumento1 paginaUSB type C to USB 2.0 and microcontroller core functionslekobhNessuna valutazione finora
- Low Cost Hitachi VAS 350 SCHDocumento1 paginaLow Cost Hitachi VAS 350 SCHendank baniNessuna valutazione finora
- TOPP PRO TPM6250 Diagrama-72144Documento5 pagineTOPP PRO TPM6250 Diagrama-72144garciaromero.miguelantonioNessuna valutazione finora
- SA868 OpenDocumento2 pagineSA868 Openmuhammadsubarkah3Nessuna valutazione finora
- Neo400 SCHDocumento1 paginaNeo400 SCHEduardo FingerNessuna valutazione finora
- RTL9210-VB-CG Demo V203 PDFDocumento5 pagineRTL9210-VB-CG Demo V203 PDFCenusa MihaiNessuna valutazione finora
- +VB +VCC: Microlab Technology IncDocumento1 pagina+VB +VCC: Microlab Technology IncIgor MNessuna valutazione finora
- Con3 Con1 GND - B GND - A U1 LM386 1 2 3: VCC VCCDocumento1 paginaCon3 Con1 GND - B GND - A U1 LM386 1 2 3: VCC VCCMartijn van ToorNessuna valutazione finora
- Micro SynthesizerDocumento2 pagineMicro Synthesizerdid concombreNessuna valutazione finora
- Circuit diagram optimizationDocumento1 paginaCircuit diagram optimizationDeepak AnandNessuna valutazione finora
- Schematic Rockola Expandable 2022-11-18Documento1 paginaSchematic Rockola Expandable 2022-11-18luckyNessuna valutazione finora
- Anais Do Workshop De Micro-ondasDa EverandAnais Do Workshop De Micro-ondasNessuna valutazione finora
- Engineering Service Revenues World Summary: Market Values & Financials by CountryDa EverandEngineering Service Revenues World Summary: Market Values & Financials by CountryNessuna valutazione finora
- Motivatinal LevelDocumento59 pagineMotivatinal LevelUjwal JaiswalNessuna valutazione finora
- Combine DocumentationDocumento4 pagineCombine DocumentationUjwal JaiswalNessuna valutazione finora
- Promotion Demotion Transfer and Its Impact On Employee Morale in DoordarshanDocumento48 paginePromotion Demotion Transfer and Its Impact On Employee Morale in DoordarshanUjwal JaiswalNessuna valutazione finora
- Importance of Labour Welfare ServicesDocumento43 pagineImportance of Labour Welfare ServicesUjwal JaiswalNessuna valutazione finora
- ChiuDocumento125 pagineChiuUjwal JaiswalNessuna valutazione finora
- ChiuDocumento125 pagineChiuUjwal JaiswalNessuna valutazione finora
- Certificate: SYSTEM" Submitted by Miss Priyanka R Shende in Partial Fulfillment of TheDocumento3 pagineCertificate: SYSTEM" Submitted by Miss Priyanka R Shende in Partial Fulfillment of TheUjwal JaiswalNessuna valutazione finora
- Combine DocumentationDocumento4 pagineCombine DocumentationUjwal JaiswalNessuna valutazione finora
- HR PolicyDocumento60 pagineHR PolicyUjwal JaiswalNessuna valutazione finora
- Cohen CGRDocumento4 pagineCohen CGRDurva YerunkarNessuna valutazione finora
- Somi NaziDocumento121 pagineSomi NaziUjwal JaiswalNessuna valutazione finora
- ChiuDocumento125 pagineChiuUjwal JaiswalNessuna valutazione finora
- Amul ReportDocumento48 pagineAmul ReportUjwal JaiswalNessuna valutazione finora
- Include - Stdio.h-Wps OfficeDocumento6 pagineInclude - Stdio.h-Wps OfficeUjwal JaiswalNessuna valutazione finora
- Practical No. 12 DMSDocumento4 paginePractical No. 12 DMSUjwal JaiswalNessuna valutazione finora
- To Study The Customers Satisfaction Towards The Ponds Products at Gondia CityDocumento47 pagineTo Study The Customers Satisfaction Towards The Ponds Products at Gondia CityUjwal JaiswalNessuna valutazione finora
- Certificate: SYSTEM" Submitted by Miss Priyanka R Shende in Partial Fulfillment of TheDocumento3 pagineCertificate: SYSTEM" Submitted by Miss Priyanka R Shende in Partial Fulfillment of TheUjwal JaiswalNessuna valutazione finora
- Social Security Code, 2020: Key Changes for Unorganised WorkersDocumento11 pagineSocial Security Code, 2020: Key Changes for Unorganised WorkersAbdul Hudaif100% (1)
- Algorithm WPS OfficeDocumento1 paginaAlgorithm WPS OfficeUjwal JaiswalNessuna valutazione finora
- Practical No.11Documento3 paginePractical No.11Ujwal JaiswalNessuna valutazione finora
- Amul ReportDocumento48 pagineAmul ReportUjwal JaiswalNessuna valutazione finora
- Emami Final 1Documento1 paginaEmami Final 1Ujwal JaiswalNessuna valutazione finora
- Sugarcane Baggase PROJECT 7Documento54 pagineSugarcane Baggase PROJECT 7Ujwal Jaiswal100% (4)
- Financial Performance Analysis of Sundaram Finance LtdDocumento69 pagineFinancial Performance Analysis of Sundaram Finance LtdUjwal JaiswalNessuna valutazione finora
- Financial Performance Analysis of Sundaram Finance LtdDocumento69 pagineFinancial Performance Analysis of Sundaram Finance LtdUjwal JaiswalNessuna valutazione finora
- Solar Grass Cutter 7Documento52 pagineSolar Grass Cutter 7Ujwal Jaiswal100% (1)
- Concept of Zero Waste 8Documento47 pagineConcept of Zero Waste 8Ujwal Jaiswal100% (1)
- Use of Plastic Waste in Construction of Flexible Pavement 8Documento50 pagineUse of Plastic Waste in Construction of Flexible Pavement 8Ujwal Jaiswal100% (1)
- Advanced Construction Technique 7Documento51 pagineAdvanced Construction Technique 7Ujwal Jaiswal67% (3)
- To Study The Customers Satisfaction Towards The Amway Products at Gondia CityDocumento43 pagineTo Study The Customers Satisfaction Towards The Amway Products at Gondia CityUjwal JaiswalNessuna valutazione finora
- Concorde HistoryDocumento5 pagineConcorde HistoryMonosyndromeNessuna valutazione finora
- Siddiqui - CV IntlDocumento5 pagineSiddiqui - CV Intler_rahmansNessuna valutazione finora
- ESDocumento139 pagineESRaviNessuna valutazione finora
- F.O.E ProjectDocumento8 pagineF.O.E ProjectHarsh GandhiNessuna valutazione finora
- HydPumpDocumento8 pagineHydPumpmanishhydraulic100% (1)
- Autofilt Rf3: Automatic Back-Flushing FilterDocumento11 pagineAutofilt Rf3: Automatic Back-Flushing Filterandres12636Nessuna valutazione finora
- Classification of ResearchDocumento20 pagineClassification of ResearchJano Baba100% (2)
- What Is A Particle AcceleratorDocumento14 pagineWhat Is A Particle AcceleratormeerANessuna valutazione finora
- JSA for blowing air in underground pipingDocumento4 pagineJSA for blowing air in underground pipingMohammed MinhajNessuna valutazione finora
- DIY Monitor HoodDocumento1 paginaDIY Monitor HoodNIkola VelkovNessuna valutazione finora
- How Steam Trap WorkDocumento40 pagineHow Steam Trap Workdeny prasyamtyo100% (1)
- Viruses of The Mind by R.dawkinsDocumento15 pagineViruses of The Mind by R.dawkinsJosé Manuel Bueso FernándezNessuna valutazione finora
- Planets, Dwarf Planets & MoonsDocumento24 paginePlanets, Dwarf Planets & MoonsSteve HetheringtonNessuna valutazione finora
- I Sing The Mighty Power of God: Orchestration To Choral AnthemDocumento9 pagineI Sing The Mighty Power of God: Orchestration To Choral AnthemSzász ImreNessuna valutazione finora
- LV100 3000Documento3 pagineLV100 3000Tibi IonNessuna valutazione finora
- OALS SummaryDocumento1 paginaOALS SummaryMark Joseph OlimonNessuna valutazione finora
- Rse 2.3Documento16 pagineRse 2.3Rudra Sai SandeepNessuna valutazione finora
- Voided Biaxial Slab: Designing Out Waste: Design Detail SheetDocumento4 pagineVoided Biaxial Slab: Designing Out Waste: Design Detail SheetAWNessuna valutazione finora
- 01 Modeling Core Concepts GuideDocumento35 pagine01 Modeling Core Concepts GuideanitalauymNessuna valutazione finora
- Part II Philippines' Civil Service Professional ReviewerDocumento25 paginePart II Philippines' Civil Service Professional ReviewerJed Tedor89% (122)
- Biology New IADocumento3 pagineBiology New IAyokuso100% (2)
- How to install APK apps on your Amazfit watchDocumento1 paginaHow to install APK apps on your Amazfit watchsven_StonNessuna valutazione finora
- Bro Dlx200 enDocumento4 pagineBro Dlx200 enEnder ZenginobuzNessuna valutazione finora
- Hand Eye CoordinationDocumento4 pagineHand Eye CoordinationmoB0BNessuna valutazione finora
- WI3150TU Partial Differential Equations 1: Detailed DescriptionDocumento2 pagineWI3150TU Partial Differential Equations 1: Detailed DescriptionhoilololNessuna valutazione finora
- Homer's Divine AudienceDocumento233 pagineHomer's Divine Audiencemarcus motaNessuna valutazione finora
- Resource ManagementDocumento5 pagineResource ManagementSripradaa BharadwajNessuna valutazione finora
- AWB-Dangerous Goods Compliance ChecklistDocumento1 paginaAWB-Dangerous Goods Compliance ChecklistsdsdsNessuna valutazione finora
- Clinical Pastoral Care HistoryDocumento22 pagineClinical Pastoral Care HistoryDinarkram Rabreca Ecul100% (1)
- Sap Businessobjects Analysis, Edition For Microsoft Office Administrator GuideDocumento54 pagineSap Businessobjects Analysis, Edition For Microsoft Office Administrator GuidePrashant ShuklaNessuna valutazione finora