Potrebbero piacerti anche
- MUSE ED Elevator: Installation ManualDocumento25 pagineMUSE ED Elevator: Installation ManualMoises PerelloNessuna valutazione finora
- Schindler ID Engl 2007Documento6 pagineSchindler ID Engl 2007leang vannarikNessuna valutazione finora
- MUSE ED Elevator: Installation ManualDocumento9 pagineMUSE ED Elevator: Installation ManualMoises Perello100% (1)
- Icontrol DC Aug 08 Rel 42-02-7222 B7Documento788 pagineIcontrol DC Aug 08 Rel 42-02-7222 B7ElputoAmo XDNessuna valutazione finora
- MUSE ED Elevator: Installation ManualDocumento6 pagineMUSE ED Elevator: Installation ManualMoises PerelloNessuna valutazione finora
- EC100 Elevator Intelligent Integrated Machine Operation Maual V2.3Documento252 pagineEC100 Elevator Intelligent Integrated Machine Operation Maual V2.3Бахтияр ЮмачиковNessuna valutazione finora
- 01 - Muse Ed - SRDocumento5 pagine01 - Muse Ed - SRMoises PerelloNessuna valutazione finora
- MUSE ED Elevator: Start-UpDocumento8 pagineMUSE ED Elevator: Start-UpMoises PerelloNessuna valutazione finora
- DCS ELV 015 Rev04 CommentedDocumento3 pagineDCS ELV 015 Rev04 CommentedAli DiabNessuna valutazione finora
- MUSE ED Elevator: Installation ManualDocumento29 pagineMUSE ED Elevator: Installation ManualMoises PerelloNessuna valutazione finora
- (Op Buffer Installation) K 601125Documento3 pagine(Op Buffer Installation) K 601125Ali DiabNessuna valutazione finora
- S3300ap-Brochure Ascensor PDFDocumento20 pagineS3300ap-Brochure Ascensor PDFStephanie García100% (1)
- OrinocoDocumento10 pagineOrinocoDouglasNessuna valutazione finora
- MUSE ED Elevator: Installation ManualDocumento5 pagineMUSE ED Elevator: Installation ManualMoises PerelloNessuna valutazione finora
- WQ137099.2 TR MR Ed3Documento7 pagineWQ137099.2 TR MR Ed3Juyel JahanNessuna valutazione finora
- Mitsubishi Catalog NexwayDocumento20 pagineMitsubishi Catalog NexwayTrung Duy Trần100% (1)
- Elevator Control Circuit DiagramDocumento7 pagineElevator Control Circuit DiagramNanotech NilsiNessuna valutazione finora
- Analogue Speed Sensor Q264127 EngDocumento5 pagineAnalogue Speed Sensor Q264127 EngPio RodolfoNessuna valutazione finora
- Wire Rope Lubricant PDFDocumento1 paginaWire Rope Lubricant PDFGutmonarchNessuna valutazione finora
- BST2100 Technical ManualDocumento18 pagineBST2100 Technical ManualOsama OdehNessuna valutazione finora
- Hitch LW: Load SensorDocumento10 pagineHitch LW: Load SensorMoises PerelloNessuna valutazione finora
- FC 3000s PDFDocumento60 pagineFC 3000s PDFAgnelo FernandesNessuna valutazione finora
- S3 Series Elevator InvertersDocumento198 pagineS3 Series Elevator Inverterscông nguyễn thànhNessuna valutazione finora
- Escalator PDFDocumento20 pagineEscalator PDFDeny AdityoNessuna valutazione finora
- PQC 3300 ApDocumento5 paginePQC 3300 ApAli DiabNessuna valutazione finora
- Traction Drive Elevator Without Machine Room With Variable Car Dimensions. Rated Load 630 - 1050 KGDocumento8 pagineTraction Drive Elevator Without Machine Room With Variable Car Dimensions. Rated Load 630 - 1050 KGTúlio ParreirasNessuna valutazione finora
- Appendix 2: System TroubleshootingDocumento4 pagineAppendix 2: System Troubleshootingعلاء صقرNessuna valutazione finora
- User'S Manual: GMBH, GermanyDocumento167 pagineUser'S Manual: GMBH, GermanyAndres Felipe CaceresNessuna valutazione finora
- Entrance Test For Quality Inspectors: For Nominated Candidates For Cpsi Master Accrediation ProgramDocumento7 pagineEntrance Test For Quality Inspectors: For Nominated Candidates For Cpsi Master Accrediation ProgramAli DiabNessuna valutazione finora
- Tricon 42-02-2T00 F4Documento301 pagineTricon 42-02-2T00 F4ElputoAmo XDNessuna valutazione finora
- MagnubroucherDocumento12 pagineMagnubroucherrmdarisaNessuna valutazione finora
- Technology On The Move.: The W 191 Drive SystemDocumento2 pagineTechnology On The Move.: The W 191 Drive Systemangela1590Nessuna valutazione finora
- PU3200 English ManualDocumento71 paginePU3200 English Manualعلاء صقرNessuna valutazione finora
- 7096Documento8 pagine7096Ema RahamanNessuna valutazione finora
- Operating Manual ArdDocumento13 pagineOperating Manual Ardkolwin .chindwinNessuna valutazione finora
- Fujitec Vietnam 1806Documento8 pagineFujitec Vietnam 1806Nguyen Hung0% (1)
- Esquemas KONE 2009 PDFDocumento35 pagineEsquemas KONE 2009 PDFkristerNessuna valutazione finora
- 07 SINCOS LoadSettingDocumento7 pagine07 SINCOS LoadSettingtran xobonNessuna valutazione finora
- PM 5 000279 en 01Documento23 paginePM 5 000279 en 01SavoyNessuna valutazione finora
- Diagrama Electrica Escalera SLDocumento23 pagineDiagrama Electrica Escalera SLjames100% (1)
- A1000Documento8 pagineA1000monikaNessuna valutazione finora
- CPSI Inspector Certification Translation 2012 - Version 15 February 2012-MKIDocumento1 paginaCPSI Inspector Certification Translation 2012 - Version 15 February 2012-MKIAli DiabNessuna valutazione finora
- Passenger Elevator (Compact Machine Room System) Series-IP/AP Version2 Series-IPDocumento13 paginePassenger Elevator (Compact Machine Room System) Series-IP/AP Version2 Series-IPyounesNessuna valutazione finora
- Simplicity Series Minivator 1000/2000Documento24 pagineSimplicity Series Minivator 1000/2000Mitch Knapp100% (1)
- Rescue V Rescue V1.4 1.4: User'S ManualDocumento36 pagineRescue V Rescue V1.4 1.4: User'S ManualSaleh El DalyNessuna valutazione finora
- Project Managers Program: Technical NoteDocumento16 pagineProject Managers Program: Technical NotealfreliaNessuna valutazione finora
- LS Elevator'Documento1 paginaLS Elevator'Mitro JeNessuna valutazione finora
- 3300 Version 2Documento20 pagine3300 Version 2ibiNessuna valutazione finora
- Manual PDF de Motores de Traccion Xinda WwtyDocumento25 pagineManual PDF de Motores de Traccion Xinda WwtyEliecer CastilloNessuna valutazione finora
- 06 - High Speed AdjustmentDocumento3 pagine06 - High Speed AdjustmentMoises PerelloNessuna valutazione finora
- Error TableDocumento19 pagineError TableJesús David Diaz MontesNessuna valutazione finora
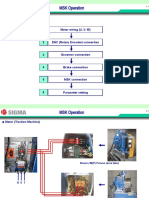
- 02 - MSK OperationDocumento12 pagine02 - MSK OperationMoises PerelloNessuna valutazione finora
- Nice 3000Documento98 pagineNice 3000NAIMUR RAHAMANNessuna valutazione finora
- PM 7 000338 en 01Documento30 paginePM 7 000338 en 01Anonymous N57sCcpiNessuna valutazione finora
- Thyssenkrupp: Elevator Technology Synergy Element Package. Fact SheetDocumento15 pagineThyssenkrupp: Elevator Technology Synergy Element Package. Fact SheetTek tek hapNessuna valutazione finora
- Architect's and Consultant's Specification Guide: Otis Elevator CompanyDocumento12 pagineArchitect's and Consultant's Specification Guide: Otis Elevator CompanyjamesNessuna valutazione finora
- Schindler Company FactsDocumento16 pagineSchindler Company FactsRajuNessuna valutazione finora
- Dokumen Dari Jon@Th@n Verrell-2-1Documento101 pagineDokumen Dari Jon@Th@n Verrell-2-1omotu79Nessuna valutazione finora
- Means of Loading and Unloading at The Seaport: Lecturer: Nguyen Quynh PhuongDocumento25 pagineMeans of Loading and Unloading at The Seaport: Lecturer: Nguyen Quynh PhuongHuỳnh HuynhNessuna valutazione finora
- Tutorial Chapter 4Documento3 pagineTutorial Chapter 4Rusdi MahmudNessuna valutazione finora
- 10 Curses That Block The BlessingDocumento21 pagine10 Curses That Block The BlessingFERNS88% (8)
- Electric Hydraulic Troubleshooting GuideDocumento3 pagineElectric Hydraulic Troubleshooting GuideFERNSNessuna valutazione finora
- Better Living - Joyce MeyerDocumento44 pagineBetter Living - Joyce MeyerFERNS50% (2)
- Soul Ties-Spiritual StrongholdsDocumento24 pagineSoul Ties-Spiritual StrongholdsFERNS100% (5)
- AM-04.08.021 Brake MxMachDocumento6 pagineAM-04.08.021 Brake MxMachFERNSNessuna valutazione finora
- I Day Ago Zebdonk From My Youtube Channel Left Me A Comment On The What The JehovahDocumento12 pagineI Day Ago Zebdonk From My Youtube Channel Left Me A Comment On The What The JehovahFERNSNessuna valutazione finora
- The Great ExchangeDocumento7 pagineThe Great ExchangeFERNSNessuna valutazione finora
- Weapons of Warfare - Derek PrinceDocumento1 paginaWeapons of Warfare - Derek PrinceFERNS100% (1)
- Invisible Barriers To Healing 4258olDocumento2 pagineInvisible Barriers To Healing 4258olFERNS100% (1)
- Egacy: The Battlefield of The MindDocumento4 pagineEgacy: The Battlefield of The MindFERNSNessuna valutazione finora
- Otis SkyriseDocumento16 pagineOtis SkyriseFERNS100% (1)
- 10 DeliveranceDocumento8 pagine10 DeliveranceFERNS100% (1)
- Express Lifts Planning GuideDocumento24 pagineExpress Lifts Planning GuideFERNSNessuna valutazione finora
- Thyssen Installation ManualDocumento18 pagineThyssen Installation ManualFERNSNessuna valutazione finora
- Otis Elevator WorldDocumento8 pagineOtis Elevator WorldFERNS100% (1)
- Otis Elevator Company Is TheDocumento10 pagineOtis Elevator Company Is TheFERNSNessuna valutazione finora
- Hyundai Elevator Planning GuideDocumento16 pagineHyundai Elevator Planning GuideFERNS100% (2)
- Sigma ElevatorDocumento12 pagineSigma ElevatorFERNS100% (1)
- Thyssenkrupp Twin Elevator Planning GuideDocumento5 pagineThyssenkrupp Twin Elevator Planning GuideFERNSNessuna valutazione finora
- DE 2512/10 OCT/FRA-LHR: - Not For Real World NavigationDocumento56 pagineDE 2512/10 OCT/FRA-LHR: - Not For Real World NavigationHendrikNessuna valutazione finora
- Engine Hand BookDocumento32 pagineEngine Hand BookAshfaq Ahmed Khawer bhattiNessuna valutazione finora
- Slat Conveyors PDFDocumento4 pagineSlat Conveyors PDFAnand BhiseNessuna valutazione finora
- MIM-WMS-03 - 2018 PESB Equipment Lifting Method StatementDocumento8 pagineMIM-WMS-03 - 2018 PESB Equipment Lifting Method StatementSatrioNessuna valutazione finora
- John Deere Attachment MatrixDocumento24 pagineJohn Deere Attachment Matrixforge_monkeyNessuna valutazione finora
- CementDocumento40 pagineCementanteid3100% (1)
- Comparative Analysis of Transportation NDocumento12 pagineComparative Analysis of Transportation NdooeelhNessuna valutazione finora
- Technical Manual: Heavy Tractor M1 (Allis-Chalmers HD-10W)Documento258 pagineTechnical Manual: Heavy Tractor M1 (Allis-Chalmers HD-10W)VoltaireZeroNessuna valutazione finora
- Market Study FormDocumento6 pagineMarket Study FormJc IbarraNessuna valutazione finora
- Strategic Supply Chain ManagementDocumento16 pagineStrategic Supply Chain ManagementKknow Ddrug100% (3)
- Electronic Centralised Aircraft MonitorDocumento2 pagineElectronic Centralised Aircraft Monitors parasdNessuna valutazione finora
- ĐỀ SỐ 22Documento5 pagineĐỀ SỐ 22Anh MaiNessuna valutazione finora
- Upper Decker: © 2013 Based On The Wampler ® Triple Wreck ™Documento4 pagineUpper Decker: © 2013 Based On The Wampler ® Triple Wreck ™juan CallesNessuna valutazione finora
- FR Error MercyDocumento5 pagineFR Error MercyNoeRtjahya Ahmad100% (1)
- The Feasibility of Manufacturing Charcoal and Charcoal Briquettes by Converting Barks in GeorgiaDocumento62 pagineThe Feasibility of Manufacturing Charcoal and Charcoal Briquettes by Converting Barks in GeorgiaRinaBenituaNessuna valutazione finora
- !!!!!!!!ford Parts TTC Ford TransitDocumento100 pagine!!!!!!!!ford Parts TTC Ford Transitgmslibri100% (3)
- Assign 2sept16 IndividualDocumento4 pagineAssign 2sept16 IndividualThiran VinharNessuna valutazione finora
- Cesna 172Documento7 pagineCesna 172eng13Nessuna valutazione finora
- Hirarc LiftingDocumento1 paginaHirarc LiftingAmir Syahir75% (4)
- Vehicle Delay AnalysisDocumento12 pagineVehicle Delay AnalysisKRISHNA YELDINessuna valutazione finora
- 15-MHR Intl-Module 15 Mechanical Plumbing and ElectricalDocumento94 pagine15-MHR Intl-Module 15 Mechanical Plumbing and ElectricalSony JsdNessuna valutazione finora
- Jsa For Operating A BobcatDocumento2 pagineJsa For Operating A Bobcatsoubhagya100% (2)
- The Coming of The SpaniardsDocumento73 pagineThe Coming of The SpaniardsAya BalangNessuna valutazione finora
- Bosch K/Ke Fuel InjectionDocumento3 pagineBosch K/Ke Fuel InjectionclcasalNessuna valutazione finora
- VWvortex Forums DIY - Adjusting The Displayed Fuel Gauge Level With A VAG-COM ID3208286Documento1 paginaVWvortex Forums DIY - Adjusting The Displayed Fuel Gauge Level With A VAG-COM ID3208286JZNessuna valutazione finora
- Chandigarh To DelhiDocumento3 pagineChandigarh To Delhigaurav_07enggNessuna valutazione finora
- Name of The Experiment: 2. Objective-: A. Primary Particulars Estimation: Given ParticularsDocumento8 pagineName of The Experiment: 2. Objective-: A. Primary Particulars Estimation: Given ParticularsSakib RafeeNessuna valutazione finora
- Annex 2.1 Contingency Planning Template SchoolsDocumento38 pagineAnnex 2.1 Contingency Planning Template SchoolsDanica Herealways88% (8)
- Brochure Renault BVA DP2Documento4 pagineBrochure Renault BVA DP2ossoski50% (2)
- Parts Catalog Cummins, 6LTAA8.9G2 - ESN 82312099 - CPL 3079-52Documento1 paginaParts Catalog Cummins, 6LTAA8.9G2 - ESN 82312099 - CPL 3079-52Hardiansyah SimarmataNessuna valutazione finora