Potrebbero piacerti anche
- A New Numerical Force Analysis Method of CBR ReducDocumento9 pagineA New Numerical Force Analysis Method of CBR ReducMaksat TemirkhanNessuna valutazione finora
- Contact Stress Analysis For A Pair of Mating GearsDocumento10 pagineContact Stress Analysis For A Pair of Mating Gearsvickytechie03Nessuna valutazione finora
- WINSEM2018-19 MEE4007 ETH MB310A VL2018195003564 Reference Material I Helical Gears FundamentalDocumento19 pagineWINSEM2018-19 MEE4007 ETH MB310A VL2018195003564 Reference Material I Helical Gears FundamentalSahil PatelNessuna valutazione finora
- Alternate Sliding Friction Formulations of Elasto - Hydrodynamic of Spur GearsDocumento12 pagineAlternate Sliding Friction Formulations of Elasto - Hydrodynamic of Spur GearsR Prabhu SekarNessuna valutazione finora
- A Combined Stress Experiment Using A HacksawDocumento9 pagineA Combined Stress Experiment Using A HacksawDavid Paska KudadiriNessuna valutazione finora
- 2015 Ortega Amaya Aortega@Aimplas - Es TNT2015OrtegaAmayaDocumento10 pagine2015 Ortega Amaya Aortega@Aimplas - Es TNT2015OrtegaAmayaCHELVASERNessuna valutazione finora
- Behaviour of Cold Formed Lipped Angles in Transmission Line Towers 2006Documento14 pagineBehaviour of Cold Formed Lipped Angles in Transmission Line Towers 2006AntenasmNessuna valutazione finora
- Static Analysis of Bevel Gears Using Finite Element Method: Key WordsDocumento14 pagineStatic Analysis of Bevel Gears Using Finite Element Method: Key WordsFrank WhittleNessuna valutazione finora
- DESIGN OF HELICAL & BEVEL GEARSDocumento53 pagineDESIGN OF HELICAL & BEVEL GEARSPRANAY SHRIDHAR100% (1)
- Feng 2016 J. Phys.: Conf. Ser. 744 012138 PDFDocumento11 pagineFeng 2016 J. Phys.: Conf. Ser. 744 012138 PDFacar1Nessuna valutazione finora
- Torsion Pendulum A Mechanical Nonlinear OscillatorDocumento7 pagineTorsion Pendulum A Mechanical Nonlinear OscillatorLeo ChakravartyNessuna valutazione finora
- Helical Gear Design and TermsDocumento3 pagineHelical Gear Design and TermssathiaNessuna valutazione finora
- Torsion of Crankshafts: Imoshenko Hiladelphia ADocumento15 pagineTorsion of Crankshafts: Imoshenko Hiladelphia ALahiru Prabhatha AmarasenaNessuna valutazione finora
- Generation of Crowned Parabolic Novikov GearsDocumento5 pagineGeneration of Crowned Parabolic Novikov GearsfgsldfjglkjsdfNessuna valutazione finora
- Ball positioning friction modelDocumento9 pagineBall positioning friction modelsaurabhchandrakerNessuna valutazione finora
- Cycloid Gear FemDocumento11 pagineCycloid Gear Femmuratti74Nessuna valutazione finora
- 35IJMPERDAPR201935Documento14 pagine35IJMPERDAPR201935TJPRC PublicationsNessuna valutazione finora
- CE6501 Structural Analysis I 2 Marks Unit 3 PDFDocumento14 pagineCE6501 Structural Analysis I 2 Marks Unit 3 PDFJuan WagnerNessuna valutazione finora
- Filament Winding Shape OptimizationDocumento14 pagineFilament Winding Shape OptimizationDanielNessuna valutazione finora
- Control Study On The CVT Metal V-Belt's Axial-Misalignment of CarDocumento5 pagineControl Study On The CVT Metal V-Belt's Axial-Misalignment of CarLalit PatilNessuna valutazione finora
- Control Study On The CVT Metal V-Belt's Axial-Misalignment of CarDocumento5 pagineControl Study On The CVT Metal V-Belt's Axial-Misalignment of CarLalit PatilNessuna valutazione finora
- Dynamic Simulation of Harmonic Gear Drives Considering Tooth Profiles Parameters OptimizationDocumento8 pagineDynamic Simulation of Harmonic Gear Drives Considering Tooth Profiles Parameters OptimizationManoj Kumar SarangiNessuna valutazione finora
- Jurnal BubutDocumento7 pagineJurnal BubutDelvan CavaleraNessuna valutazione finora
- Modelling and Vibration Analysis of Misaligned Rotor-Ball Bearing SystemsDocumento16 pagineModelling and Vibration Analysis of Misaligned Rotor-Ball Bearing Systemsmanjunath k sNessuna valutazione finora
- Comparison of Composite Blade Models: A Coupled-Beam Msc/Nastran Finite-Element ModelDocumento16 pagineComparison of Composite Blade Models: A Coupled-Beam Msc/Nastran Finite-Element ModelVijay NidagalkarNessuna valutazione finora
- Module 6 - TorsionDocumento23 pagineModule 6 - TorsionNadine KyrahNessuna valutazione finora
- Machine Design 2013Documento44 pagineMachine Design 2013cooLkiD1412Nessuna valutazione finora
- Stress and Strain State of Single - Stage Cycloidal Speed ReducerDocumento6 pagineStress and Strain State of Single - Stage Cycloidal Speed ReducerdimtecNessuna valutazione finora
- Som-Ii Uqb 2019-20Documento23 pagineSom-Ii Uqb 2019-20VENKATESH METHRINessuna valutazione finora
- Research ArticleDocumento9 pagineResearch ArticleADII 2701Nessuna valutazione finora
- Recoil and Vibration in An Archery Bow Equipped With A Multi-Rod StabilizerDocumento17 pagineRecoil and Vibration in An Archery Bow Equipped With A Multi-Rod StabilizerYahya Barasmiantun El KadiryNessuna valutazione finora
- Spur Gear Fatigue LifeDocumento7 pagineSpur Gear Fatigue LifeGamini SureshNessuna valutazione finora
- Ac 2008-1325: Interactive Involute Gear Analysis and Tooth Profile Generation Using Working Model 2DDocumento13 pagineAc 2008-1325: Interactive Involute Gear Analysis and Tooth Profile Generation Using Working Model 2DRobin MachargNessuna valutazione finora
- Finite Extension of A Viscoelastic Multiple Filament YarntDocumento12 pagineFinite Extension of A Viscoelastic Multiple Filament Yarntapi-3733260Nessuna valutazione finora
- Topic 1. Biochemical BondsDocumento25 pagineTopic 1. Biochemical BondsBingze DaiNessuna valutazione finora
- Home Search Collections Journals About Contact Us My IopscienceDocumento8 pagineHome Search Collections Journals About Contact Us My IopscienceCan CemreNessuna valutazione finora
- Optimization of Rotor Structure For Synchronous Reluctance Motor Using Coupled Topology Optimization Based On Electromagnetic Field Analysis and Structural MechanicsDocumento2 pagineOptimization of Rotor Structure For Synchronous Reluctance Motor Using Coupled Topology Optimization Based On Electromagnetic Field Analysis and Structural MechanicsRaphaelNessuna valutazione finora
- Chapter 1 Shaft (Cont'd)Documento47 pagineChapter 1 Shaft (Cont'd)Rayuth KEATNessuna valutazione finora
- Transient Stress Analysis On Spur GearDocumento8 pagineTransient Stress Analysis On Spur GearPrithviraj DagaNessuna valutazione finora
- TorsionDocumento20 pagineTorsionSathish SelvaNessuna valutazione finora
- Lateral Buckling Resistance of Inelastici-Beams Under Off-Shear Center LoadingDocumento6 pagineLateral Buckling Resistance of Inelastici-Beams Under Off-Shear Center Loadingyacino30Nessuna valutazione finora
- Assignment 1Documento3 pagineAssignment 1Sampreeti MazumdarNessuna valutazione finora
- Mechanical Springs GuideDocumento33 pagineMechanical Springs GuideAhmedOMNessuna valutazione finora
- Rodrigo Moreno Orjan Smedby Magnus Borga: Index Terms - Biomedical Image Analysis, Trabecular BoneDocumento4 pagineRodrigo Moreno Orjan Smedby Magnus Borga: Index Terms - Biomedical Image Analysis, Trabecular Bonekumar swamyNessuna valutazione finora
- SPE-15467 Basic Concepts in Static BHA Analysis For Directional DrillingDocumento12 pagineSPE-15467 Basic Concepts in Static BHA Analysis For Directional Drillingdrilling moneytreeNessuna valutazione finora
- 1-s2.0-S1350630714003501-main (2)Documento16 pagine1-s2.0-S1350630714003501-main (2)Lucas Caldas RebouçasNessuna valutazione finora
- DOME 15 Recap Text 1 PDFDocumento4 pagineDOME 15 Recap Text 1 PDFAditya Varma YalamanchiliNessuna valutazione finora
- A Study On The Development of The O For Regulating The 6 D.O.F Circular FixatorDocumento8 pagineA Study On The Development of The O For Regulating The 6 D.O.F Circular Fixatorpm089Nessuna valutazione finora
- Squeak Noise in Lead Screw SystemsDocumento9 pagineSqueak Noise in Lead Screw Systemsoyuncu81Nessuna valutazione finora
- Subjective Questions (Any Three) :-: Univ. Roll NoDocumento3 pagineSubjective Questions (Any Three) :-: Univ. Roll NoSonukNessuna valutazione finora
- 4.9 Design of Singly Symmetric Cross-SectionsDocumento11 pagine4.9 Design of Singly Symmetric Cross-Sectionsengineering trimatraNessuna valutazione finora
- An Approach To The DeterminationDocumento5 pagineAn Approach To The DeterminationchoupoNessuna valutazione finora
- 10 11648 J Ijmea 20160405 12Documento6 pagine10 11648 J Ijmea 20160405 12AYKUTNessuna valutazione finora
- Introduction to quiz: Beam theoryDocumento3 pagineIntroduction to quiz: Beam theoryrajuNessuna valutazione finora
- MMT I Lab#07Documento5 pagineMMT I Lab#07Abdul WahabNessuna valutazione finora
- An Improved Method For Estimation of Ramberg-Osgood Curves Ofsteels From Monotonic Tensile PropertiesDocumento15 pagineAn Improved Method For Estimation of Ramberg-Osgood Curves Ofsteels From Monotonic Tensile PropertiesAsad MaqsoodNessuna valutazione finora
- The International Journal of Engineering and Science (The IJES)Documento7 pagineThe International Journal of Engineering and Science (The IJES)theijesNessuna valutazione finora
- Deflection of BeamsDocumento6 pagineDeflection of BeamsManojKumarSinghNessuna valutazione finora
- Stress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionDa EverandStress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionValutazione: 2.5 su 5 stelle2.5/5 (4)
- Calculus on Heisenberg Manifolds. (AM-119), Volume 119Da EverandCalculus on Heisenberg Manifolds. (AM-119), Volume 119Nessuna valutazione finora
- Sliding Contact Bearings Sliding Contact Bearings: r c μ n p r c μ n pDocumento4 pagineSliding Contact Bearings Sliding Contact Bearings: r c μ n p r c μ n pAditya Varma YalamanchiliNessuna valutazione finora
- DOME 20 Recap Text 1 PDFDocumento3 pagineDOME 20 Recap Text 1 PDFAditya Varma YalamanchiliNessuna valutazione finora
- Fric%on Clutches Fric%on Clutches: μ P D d D d μ PDocumento2 pagineFric%on Clutches Fric%on Clutches: μ P D d D d μ PAditya Varma YalamanchiliNessuna valutazione finora
- Belt Drive Construction and TypesDocumento4 pagineBelt Drive Construction and TypesAditya Varma YalamanchiliNessuna valutazione finora
- DOME 15 Recap Text 1 PDFDocumento4 pagineDOME 15 Recap Text 1 PDFAditya Varma YalamanchiliNessuna valutazione finora
- Design of Machine Elements - Chapter 20: A M (Q+ ZDocumento6 pagineDesign of Machine Elements - Chapter 20: A M (Q+ ZAditya Varma YalamanchiliNessuna valutazione finora
- Dome - 18 - PFP 1 - S - 01 PDFDocumento4 pagineDome - 18 - PFP 1 - S - 01 PDFAditya Varma YalamanchiliNessuna valutazione finora
- Design of Machine Elements - Chapter 11: 29/11/18, 4F35 PM Page 1 of 4Documento4 pagineDesign of Machine Elements - Chapter 11: 29/11/18, 4F35 PM Page 1 of 4Aditya Varma YalamanchiliNessuna valutazione finora
- PU BOOK Gott and Duggan PDFDocumento145 paginePU BOOK Gott and Duggan PDFAditya Varma YalamanchiliNessuna valutazione finora
- Machine Elements - Chapter 15 Bearing DesignDocumento4 pagineMachine Elements - Chapter 15 Bearing DesignAditya Varma YalamanchiliNessuna valutazione finora
- Design of Machine Elements - Chapter 13: Step I: Belt TensionsDocumento11 pagineDesign of Machine Elements - Chapter 13: Step I: Belt TensionsAditya Varma YalamanchiliNessuna valutazione finora
- Design of Machine Elements - Chapter 16: 6 μ log 6 (30 ×) 10 log 3Documento9 pagineDesign of Machine Elements - Chapter 16: 6 μ log 6 (30 ×) 10 log 3Aditya Varma YalamanchiliNessuna valutazione finora
- PU in Biology Art PDFDocumento9 paginePU in Biology Art PDFAditya Varma YalamanchiliNessuna valutazione finora
- Inquiry in Science Education: International Perspectives: Eva Krugly-Smolska and Peter C. Taylor, Section EditorsDocumento23 pagineInquiry in Science Education: International Perspectives: Eva Krugly-Smolska and Peter C. Taylor, Section EditorsAditya Varma YalamanchiliNessuna valutazione finora
- PU A Framework For Practical Work PDFDocumento22 paginePU A Framework For Practical Work PDFAditya Varma YalamanchiliNessuna valutazione finora
- PU Art Ros Richard Assess PDFDocumento30 paginePU Art Ros Richard Assess PDFAditya Varma YalamanchiliNessuna valutazione finora
- DepreciationDocumento20 pagineDepreciationAditya Varma YalamanchiliNessuna valutazione finora
- Artikel PDFDocumento21 pagineArtikel PDFGuia Mae Vallente PairatNessuna valutazione finora
- Understanding Evidence in Scientific Disciplines: Identifying and Mapping The Thinking Behind The Doing' and Its Importance in Curriculum DevelopmentDocumento19 pagineUnderstanding Evidence in Scientific Disciplines: Identifying and Mapping The Thinking Behind The Doing' and Its Importance in Curriculum DevelopmentAditya Varma YalamanchiliNessuna valutazione finora
- A Comprehensive Assessment Strategy For Physics Laboratory CoursesDocumento7 pagineA Comprehensive Assessment Strategy For Physics Laboratory CourseskalikadeviNessuna valutazione finora
- 42rle Automatic TransmissionDocumento128 pagine42rle Automatic Transmissionapi-2614064490% (48)
- KORE: Basic Course KORE: Basic Course: Training R IngDocumento19 pagineKORE: Basic Course KORE: Basic Course: Training R IngEdson Pires da SilvaNessuna valutazione finora
- 16m PDFDocumento20 pagine16m PDFDennis LuqueNessuna valutazione finora
- Rexnord Elastomer CouplingDocumento20 pagineRexnord Elastomer Couplingidontlikeebooks100% (1)
- Wood Magazine Issue #189Documento96 pagineWood Magazine Issue #189bangbang63100% (1)
- Nit Sathion January - 2015 FinalDocumento186 pagineNit Sathion January - 2015 Finalstudent411041Nessuna valutazione finora
- Brera PDFDocumento270 pagineBrera PDFGiorgio VăleanNessuna valutazione finora
- Only Numbered Service PartsDocumento25 pagineOnly Numbered Service PartsamlogerNessuna valutazione finora
- Screw Conveyor CalculationDocumento3 pagineScrew Conveyor CalculationS AdeNessuna valutazione finora
- Ade 422 423 424 Workshop Manual Abby PDFDocumento184 pagineAde 422 423 424 Workshop Manual Abby PDFahmed88% (17)
- Work Shop RepairDocumento7 pagineWork Shop RepairFeroz GullNessuna valutazione finora
- SH 030123 CDocumento96 pagineSH 030123 CPedro BarbosaNessuna valutazione finora
- Tm9 2320 208 34pDocumento180 pagineTm9 2320 208 34pAnthony Cox100% (2)
- Aircraft Fuel SystemDocumento17 pagineAircraft Fuel SystemtallerjmcarsNessuna valutazione finora
- RS 160 Rear Axle PDFDocumento31 pagineRS 160 Rear Axle PDFMohan CharanchathNessuna valutazione finora
- Duplex Tank Mounted Scroll Medical Air Plants With Desiccant Air Dryers 2 Through 5 HPDocumento2 pagineDuplex Tank Mounted Scroll Medical Air Plants With Desiccant Air Dryers 2 Through 5 HPEng.Gihad EladlNessuna valutazione finora
- Schneider ContactorsDocumento926 pagineSchneider Contactorsramonagiurgea86Nessuna valutazione finora
- C93 C13 C18 Tier 4 FinalDocumento132 pagineC93 C13 C18 Tier 4 FinalVictor RamosNessuna valutazione finora
- Yordyqlq LQLQLQLQ LQLQLQLQ LQLLQLQL QLQLQL: Professional Development Seminar Series - NEC Requirements For GeneratorsDocumento17 pagineYordyqlq LQLQLQLQ LQLQLQLQ LQLLQLQL QLQLQL: Professional Development Seminar Series - NEC Requirements For GeneratorsYordi AlvitresNessuna valutazione finora
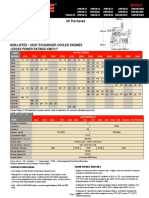
- JU6H-NL34 143.5 KWDocumento8 pagineJU6H-NL34 143.5 KWReza Tamba67% (3)
- Air Intake Piping - Alaip431Documento3 pagineAir Intake Piping - Alaip431Shaad ShawkatNessuna valutazione finora
- Irjet V4i4801Documento6 pagineIrjet V4i4801vicky CJNessuna valutazione finora
- Unit I Synchronous Generator 9: Ee 8401 - Electrical Machines - IiDocumento28 pagineUnit I Synchronous Generator 9: Ee 8401 - Electrical Machines - Ii8262 Vipul KumarNessuna valutazione finora
- 6991 0389 01a OVER HAUL UNIDAD ROTACIONDocumento8 pagine6991 0389 01a OVER HAUL UNIDAD ROTACIONJhonatan rincon martinezNessuna valutazione finora
- Mechanics of Machines: DR Tuan Mohammad Yusoff ShahDocumento31 pagineMechanics of Machines: DR Tuan Mohammad Yusoff ShahSuthan Muthu KrisnanNessuna valutazione finora
- Module IV-Milling MachineDocumento26 pagineModule IV-Milling MachineNalluriRavindra100% (2)
- Yanmar Manual Motori PDFDocumento136 pagineYanmar Manual Motori PDFAhmer Camdzic50% (2)
- 314C LCR ExcavatorDocumento24 pagine314C LCR ExcavatorMarco YeppaNessuna valutazione finora
- Wire Rope Sling Catalog and Capacity GuideDocumento26 pagineWire Rope Sling Catalog and Capacity GuideSamsunggalaxyj7 SNessuna valutazione finora
- Turbine Is A Rotary Machine With Vanes or Blades Around ItDocumento10 pagineTurbine Is A Rotary Machine With Vanes or Blades Around ItTalha AhmadNessuna valutazione finora