Potrebbero piacerti anche
- Projects With Microcontrollers And PICCDa EverandProjects With Microcontrollers And PICCValutazione: 5 su 5 stelle5/5 (1)
- Module MainDocumento11 pagineModule MainRr RongNessuna valutazione finora
- PidDocumento7 paginePidEmilio Arrieta GallardoNessuna valutazione finora
- Network with Practical Labs Configuration: Step by Step configuration of Router and Switch configurationDa EverandNetwork with Practical Labs Configuration: Step by Step configuration of Router and Switch configurationNessuna valutazione finora
- Lab 12Documento6 pagineLab 12ThoughtsNessuna valutazione finora
- Interface Verilog CodeDocumento21 pagineInterface Verilog CodeVishwanath B RajashekarNessuna valutazione finora
- PID Control MAX6675 Thermocouple Arduino Schematic With Rotary EncoderDocumento13 paginePID Control MAX6675 Thermocouple Arduino Schematic With Rotary EncoderStewin Perez100% (1)
- VHDL Code For LCD DisplayDocumento7 pagineVHDL Code For LCD DisplayNguyễn Văn TâmNessuna valutazione finora
- Lab 6 DSDDocumento12 pagineLab 6 DSDRohaidNessuna valutazione finora
- VHDL Code For LCD DisplayDocumento7 pagineVHDL Code For LCD DisplayPraveen VaishnavNessuna valutazione finora
- Verified Interfacing ProgramDocumento16 pagineVerified Interfacing ProgramVishwanath B RajashekarNessuna valutazione finora
- I2c Bus VHDLDocumento13 pagineI2c Bus VHDLsantoshpandermishiNessuna valutazione finora
- Eee 270 Advanced Topics in Logic Design More On FSMDS: References/CreditsDocumento27 pagineEee 270 Advanced Topics in Logic Design More On FSMDS: References/CreditsPraveen MeduriNessuna valutazione finora
- Binary 1's and 0's CounterDocumento13 pagineBinary 1's and 0's CounterKetan SalviNessuna valutazione finora
- RS232 FinalcodeDocumento9 pagineRS232 FinalcodeAsif BuddhaNessuna valutazione finora
- 3rd Int Sequential Logic PDFDocumento14 pagine3rd Int Sequential Logic PDFUtsav ParasharNessuna valutazione finora
- FinalDocumento7 pagineFinalHoàng Long Nguyễn BùiNessuna valutazione finora
- PS2Documento3 paginePS2binhnhi0007Nessuna valutazione finora
- Digital VlsiDocumento18 pagineDigital Vlsiwww.chandangowda1128Nessuna valutazione finora
- Arm MicrocontrollerDocumento17 pagineArm MicrocontrollerIragoudaNessuna valutazione finora
- ADT7420 Codigo LibroDocumento4 pagineADT7420 Codigo LibroAPRENDE LO QUE APRENDONessuna valutazione finora
- Dcs-Ii Lab File: - Anupam Sobti 17/EC/09Documento19 pagineDcs-Ii Lab File: - Anupam Sobti 17/EC/09Ankit GoelNessuna valutazione finora
- DSD VHDL Ch5Documento23 pagineDSD VHDL Ch5ftkoayNessuna valutazione finora
- DSD1Documento3 pagineDSD1Phan TanNessuna valutazione finora
- Lecture 7: Projects 2 and 3Documento17 pagineLecture 7: Projects 2 and 3Sivasubramanian ManickamNessuna valutazione finora
- Weather Station Using 8051Documento10 pagineWeather Station Using 8051MANOJ K0% (1)
- Bilet 7 ADocumento4 pagineBilet 7 AbiancaNessuna valutazione finora
- Atmega 328Documento23 pagineAtmega 328Hồ Thanh ThiênNessuna valutazione finora
- Mini Project CodeDocumento28 pagineMini Project CodeSkMujeebullahNessuna valutazione finora
- Muhammad Sameer Ul Hassan 01-133192-092 BEE-5C Embedded Systems and Designs Complex Engineering Problem 31 JANUARY 2022Documento20 pagineMuhammad Sameer Ul Hassan 01-133192-092 BEE-5C Embedded Systems and Designs Complex Engineering Problem 31 JANUARY 2022Sameer KhanNessuna valutazione finora
- Ejemplos VHDLDocumento5 pagineEjemplos VHDLLeón Emmanuel NNessuna valutazione finora
- Proyecto Código PrincipalDocumento18 pagineProyecto Código PrincipalFrancisco Javier ReyesNessuna valutazione finora
- Digital System Design Example 1: GCD Calculator: Start Signal, Which Commences The Computation ProcessDocumento31 pagineDigital System Design Example 1: GCD Calculator: Start Signal, Which Commences The Computation ProcessEMJAYNessuna valutazione finora
- FireDocumento6 pagineFireJDNET TECHNOLOGIESNessuna valutazione finora
- Verilog Dice GameDocumento6 pagineVerilog Dice GameVishnu Sharma50% (2)
- Experiment No - 14: Objective - To Implement 11011 Nonoverlapping Mealy Sequence DetectorDocumento7 pagineExperiment No - 14: Objective - To Implement 11011 Nonoverlapping Mealy Sequence DetectorRanveerNessuna valutazione finora
- Nhom CT3 1 TuanNamHieuDuyDocumento15 pagineNhom CT3 1 TuanNamHieuDuyPhan Duy LuanNessuna valutazione finora
- VHDL UartDocumento53 pagineVHDL UartEhsan Mahdavi100% (1)
- Tugas Mencatat Program ArduinoDocumento21 pagineTugas Mencatat Program Arduinoindahwlr12Nessuna valutazione finora
- UARTDocumento34 pagineUARTMohit Dayal67% (3)
- Verilog Modules For Common Digital FunctionsDocumento30 pagineVerilog Modules For Common Digital Functionssudarshan poojaryNessuna valutazione finora
- New Digital ExprimentDocumento14 pagineNew Digital ExprimentSpoorthi BNessuna valutazione finora
- 21BCT0226 VL2022230104560 Ast04Documento22 pagine21BCT0226 VL2022230104560 Ast04Mohammed MohsinNessuna valutazione finora
- GPS CodingDocumento13 pagineGPS CodinghimanshuNessuna valutazione finora
- 02 133212 093 11478092851 16122023 105636pmDocumento7 pagine02 133212 093 11478092851 16122023 105636pmnabeedbuksh2Nessuna valutazione finora
- Always @ (Posedge CLK - 2) Begin If (Sens - 1) Pcount Pcount + 1 Else Pcount Pcount - 1 EndDocumento3 pagineAlways @ (Posedge CLK - 2) Begin If (Sens - 1) Pcount Pcount + 1 Else Pcount Pcount - 1 Endshahd100% (1)
- SARINTO (17157783) Teknik ElektroDocumento3 pagineSARINTO (17157783) Teknik ElektroSarinto 81Nessuna valutazione finora
- Lab 4Documento23 pagineLab 4Suyash MishraNessuna valutazione finora
- Cycle 3 Part BDocumento10 pagineCycle 3 Part BNithyashree MNessuna valutazione finora
- Verilog Coding For Digital SystemDocumento12 pagineVerilog Coding For Digital SystemBalajeNessuna valutazione finora
- RECCORDDocumento23 pagineRECCORDvenkata satishNessuna valutazione finora
- VHDL - Practical Example - Designing An UARTDocumento18 pagineVHDL - Practical Example - Designing An UARTPrabakaran EllaiyappanNessuna valutazione finora
- VLSI CodeDocumento20 pagineVLSI CodeOm BhandareNessuna valutazione finora
- FPGA Temp SensorDocumento8 pagineFPGA Temp SensorNam NguyenNessuna valutazione finora
- Program Arduino Lab ELDA 2Documento13 pagineProgram Arduino Lab ELDA 2Oups GamingNessuna valutazione finora
- BdgenDocumento2 pagineBdgenmukulNessuna valutazione finora
- #Include XC.HDocumento4 pagine#Include XC.HAnass OkhitaNessuna valutazione finora
- LCD 2wires Ex Pic18fDocumento2 pagineLCD 2wires Ex Pic18flilianfis100% (1)
- Code FinalDocumento22 pagineCode FinalKhánh NguyễnNessuna valutazione finora
- ROM Addr M N N - Words N Rom N - Words Data Ixleft N N - Words IDocumento1 paginaROM Addr M N N - Words N Rom N - Words Data Ixleft N N - Words ImarcelinyNessuna valutazione finora
- Input Wire Input Wire Input Wire Input Wire Output Wire Output Wire Output Wire Wire Wire AssignDocumento1 paginaInput Wire Input Wire Input Wire Input Wire Output Wire Output Wire Output Wire Wire Wire AssignmarcelinyNessuna valutazione finora
- Catalog MDF 2021 To WebDocumento68 pagineCatalog MDF 2021 To WebmarcelinyNessuna valutazione finora
- Lect11 PDFDocumento13 pagineLect11 PDFmarcelinyNessuna valutazione finora
- Dist Mem Gen Ds322Documento16 pagineDist Mem Gen Ds322marcelinyNessuna valutazione finora
- Lect11 PDFDocumento13 pagineLect11 PDFmarcelinyNessuna valutazione finora
- Block Memory Generator v2.6: DS512 October 10, 2007 Product SpecificationDocumento60 pagineBlock Memory Generator v2.6: DS512 October 10, 2007 Product SpecificationmarcelinyNessuna valutazione finora
- Erplj: Certificate ConformityDocumento1 paginaErplj: Certificate ConformitymarcelinyNessuna valutazione finora
- KX-NS500 Specsheet EnglishDocumento2 pagineKX-NS500 Specsheet EnglishmarcelinyNessuna valutazione finora
- Digital Systems Design: Video Signal Generation For The Altera DE2 BoardDocumento13 pagineDigital Systems Design: Video Signal Generation For The Altera DE2 BoardmarcelinyNessuna valutazione finora
- MemoriiDocumento34 pagineMemoriimarcelinyNessuna valutazione finora
- MG/SP Series (V4.9/V5.1) What's NewDocumento5 pagineMG/SP Series (V4.9/V5.1) What's NewmarcelinyNessuna valutazione finora
- AlgoRex - CI1145 Operators ManualDocumento42 pagineAlgoRex - CI1145 Operators ManualMajid MohammadianNessuna valutazione finora
- Tl150 InstallationDocumento2 pagineTl150 InstallationmarcelinyNessuna valutazione finora
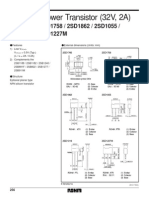
- Medium Power Transistor (32V, 2A) : 2SD1766 / 2SD1758 / 2SD1862 / 2SD1055 / 2SD1919 / 2SD1227MDocumento4 pagineMedium Power Transistor (32V, 2A) : 2SD1766 / 2SD1758 / 2SD1862 / 2SD1055 / 2SD1919 / 2SD1227MmarcelinyNessuna valutazione finora
- Picoblaze ManualDocumento75 paginePicoblaze ManualmarcelinyNessuna valutazione finora
- LM79XX: 3-Terminal 1A Negative Voltage RegulatorDocumento15 pagineLM79XX: 3-Terminal 1A Negative Voltage RegulatormarcelinyNessuna valutazione finora
- Device Network SDK Programming Manual (Decoder)Documento43 pagineDevice Network SDK Programming Manual (Decoder)marcelinyNessuna valutazione finora
- Installation Admin GuideDocumento87 pagineInstallation Admin Guidenkemot100% (2)
- Fire CS1140 ManualDocumento8 pagineFire CS1140 ManualshebabgNessuna valutazione finora
- DB-Aire II Systems 50/60Hz: Precision Environmental Control Unit Cooling Capacity: 2 To 26 TR (7 To 91 KW)Documento24 pagineDB-Aire II Systems 50/60Hz: Precision Environmental Control Unit Cooling Capacity: 2 To 26 TR (7 To 91 KW)Sodhi S SohalNessuna valutazione finora
- Designing and Maitenance of Control PanelDocumento40 pagineDesigning and Maitenance of Control PanelVenomNessuna valutazione finora
- Atitudine LSM9DS0 SensorDocumento74 pagineAtitudine LSM9DS0 SensorquebornNessuna valutazione finora
- Unit 2 NotesDocumento75 pagineUnit 2 NotesrajeeevaNessuna valutazione finora
- Field Interviewer Cover LetterDocumento7 pagineField Interviewer Cover Letterbcrqhr1n100% (2)
- Stryker Xenon 6000 Light Source: Troubleshooting GuideDocumento1 paginaStryker Xenon 6000 Light Source: Troubleshooting GuideHealthcare repair and serviceNessuna valutazione finora
- ISO26262 and IEC61508Documento12 pagineISO26262 and IEC61508최재호100% (1)
- 1.3. Types of Computer NetworksDocumento10 pagine1.3. Types of Computer NetworksJUGRAJ SINGHNessuna valutazione finora
- Arml 2009 2014 PDFDocumento530 pagineArml 2009 2014 PDFjordanrmaNessuna valutazione finora
- 2019 - Introduction To Data Analytics Using RDocumento5 pagine2019 - Introduction To Data Analytics Using RYeickson Mendoza MartinezNessuna valutazione finora
- Week 1 - Introduction To Discrete StructuresDocumento3 pagineWeek 1 - Introduction To Discrete StructuresOtaku OverlordNessuna valutazione finora
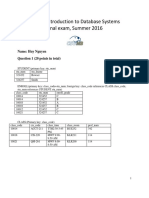
- CST363 Final Exam HuyNguyenDocumento9 pagineCST363 Final Exam HuyNguyenHuy NguyenNessuna valutazione finora
- Sterile Tube Fuser - DRY: GE Healthcare Life SciencesDocumento50 pagineSterile Tube Fuser - DRY: GE Healthcare Life SciencesCarlos Alberto Ramirez GarciaNessuna valutazione finora
- CENELEC GridProfileDocumento4 pagineCENELEC GridProfileMartin LeonardNessuna valutazione finora
- Further Pure Mathematics F1: Pearson EdexcelDocumento32 pagineFurther Pure Mathematics F1: Pearson EdexcelLukeTayNessuna valutazione finora
- Image Search Engine: Resource GuideDocumento16 pagineImage Search Engine: Resource Guideprakash_embsysNessuna valutazione finora
- Extending TeamsDocumento88 pagineExtending TeamsYo Gin YunenNessuna valutazione finora
- C86AS0015 - R0 - WorkSiteSecurityPlan PDFDocumento38 pagineC86AS0015 - R0 - WorkSiteSecurityPlan PDFLiou Will SonNessuna valutazione finora
- Nera Telecommunications LTD Annual Report 2019 PDFDocumento160 pagineNera Telecommunications LTD Annual Report 2019 PDFNipun SahniNessuna valutazione finora
- A Gift of Fire Chapter1Documento23 pagineA Gift of Fire Chapter1김민성Nessuna valutazione finora
- MTH501 Linear Algebra Handouts PDFDocumento524 pagineMTH501 Linear Algebra Handouts PDFSonam Alvi75% (8)
- Unit 3 - NormalizationDocumento59 pagineUnit 3 - NormalizationNimish MakhariaNessuna valutazione finora
- Excel Weight Tracker LB KGDocumento12 pagineExcel Weight Tracker LB KGCedric CabucoNessuna valutazione finora
- Application of ICT and BIM For Implementation of Building ByelawsDocumento41 pagineApplication of ICT and BIM For Implementation of Building ByelawsAyesha MalikNessuna valutazione finora
- Alu - 7368 Isam Ont G-240w-b InfoDocumento7 pagineAlu - 7368 Isam Ont G-240w-b InfodcooverNessuna valutazione finora
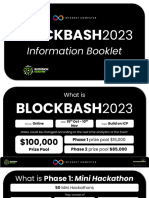
- Blockbash 2023 DocumentDocumento14 pagineBlockbash 2023 DocumentNessuna valutazione finora
- AS400 Questions SDocumento21 pagineAS400 Questions SNaveen SaharanNessuna valutazione finora
- Chapter 4 - Iot SecurityDocumento28 pagineChapter 4 - Iot SecurityBirunthaa SashaNessuna valutazione finora
- Make Money OnlineDocumento9 pagineMake Money OnlineTed100% (3)
- Wind Speed Modelling Using Inverse Weibull Distrubition - A Case Study For B - Lec - K, Turkey (#299493) - 285602Documento5 pagineWind Speed Modelling Using Inverse Weibull Distrubition - A Case Study For B - Lec - K, Turkey (#299493) - 285602CherinetNessuna valutazione finora
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosDa EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosValutazione: 5 su 5 stelle5/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDa EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionValutazione: 4.5 su 5 stelle4.5/5 (543)
- Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Da EverandMultiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Nessuna valutazione finora
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonDa EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonValutazione: 5 su 5 stelle5/5 (2)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersDa Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersValutazione: 5 su 5 stelle5/5 (1)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tDa EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tValutazione: 4.5 su 5 stelle4.5/5 (27)
- Retro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsDa EverandRetro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsNessuna valutazione finora
- Empires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldDa EverandEmpires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldValutazione: 4 su 5 stelle4/5 (87)
- Power System Control and ProtectionDa EverandPower System Control and ProtectionB. Don RussellValutazione: 4 su 5 stelle4/5 (11)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeDa EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeValutazione: 4.5 su 5 stelle4.5/5 (10)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialDa EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialValutazione: 3.5 su 5 stelle3.5/5 (3)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesDa EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesValutazione: 5 su 5 stelle5/5 (1)
- Guide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)Da EverandGuide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)Valutazione: 4 su 5 stelle4/5 (2)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDa EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionValutazione: 4 su 5 stelle4/5 (331)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsDa EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsValutazione: 3.5 su 5 stelle3.5/5 (2)
- Teach Yourself Electricity and Electronics, 6th EditionDa EverandTeach Yourself Electricity and Electronics, 6th EditionValutazione: 3.5 su 5 stelle3.5/5 (15)
- Build Your Own Electronics WorkshopDa EverandBuild Your Own Electronics WorkshopValutazione: 3.5 su 5 stelle3.5/5 (3)
- Power Electronics Diploma Interview Q&A: Career GuideDa EverandPower Electronics Diploma Interview Q&A: Career GuideNessuna valutazione finora