Potrebbero piacerti anche
- Apuntes Del Curso Cap. 5 6 7 y 8Documento28 pagineApuntes Del Curso Cap. 5 6 7 y 8ArguetaOoskarNessuna valutazione finora
- Capa de Enlace de DatosDocumento7 pagineCapa de Enlace de DatosValeryn RodriguezNessuna valutazione finora
- SERVICIOSDocumento7 pagineSERVICIOSVITELIO XAVIER BELTRAN ESPINOZANessuna valutazione finora
- Protocolos de transporte orientados a conexiónDocumento67 pagineProtocolos de transporte orientados a conexiónBrandoon ㊊㊐㊋㊌Nessuna valutazione finora
- Redes - Capa de Enlace de DatosDocumento6 pagineRedes - Capa de Enlace de DatosMi St1.1Nessuna valutazione finora
- Tema V Control de EnlacesDocumento3 pagineTema V Control de EnlacesYael RDNessuna valutazione finora
- TEMA VIII Nuevas Tecnologías Inalámbricas TCP IPDocumento12 pagineTEMA VIII Nuevas Tecnologías Inalámbricas TCP IPgeneskar perezNessuna valutazione finora
- Capa de Transporte - 01Documento5 pagineCapa de Transporte - 01Carlos GomezNessuna valutazione finora
- 3-ACTIVIDAD DE APRENDIZAJE 2-INVESTIGACIÓN - Capa de TransporteDocumento7 pagine3-ACTIVIDAD DE APRENDIZAJE 2-INVESTIGACIÓN - Capa de TransporteValeryn RodriguezNessuna valutazione finora
- CAPA 4-Capa de TransporteDocumento17 pagineCAPA 4-Capa de TransporteValéria ValverdeNessuna valutazione finora
- RC Clase4Documento16 pagineRC Clase4Alvin LopezNessuna valutazione finora
- Concepto y Función de Un Protocolo de EnlaceDocumento9 pagineConcepto y Función de Un Protocolo de EnlaceSergio Granados QuezadaNessuna valutazione finora
- Control de enlace de datos y protocolosDocumento4 pagineControl de enlace de datos y protocolosRomer Gil MorenoNessuna valutazione finora
- Capa 2 Modelo OsiDocumento8 pagineCapa 2 Modelo OsiArmando SanchezNessuna valutazione finora
- Clase 10Documento14 pagineClase 10Marquiel GonzalezNessuna valutazione finora
- Frame RelayDocumento8 pagineFrame RelayJuan CarlosNessuna valutazione finora
- Frame RelayDocumento9 pagineFrame RelayOliver Wod CPNessuna valutazione finora
- Introduccion A Los Protocolos de ComunicacionDocumento6 pagineIntroduccion A Los Protocolos de ComunicaciondavidcasjimNessuna valutazione finora
- Elementos de Los Protocolos de TransporteDocumento5 pagineElementos de Los Protocolos de TransporteJose Vicente GalloNessuna valutazione finora
- Capa 4Documento8 pagineCapa 4andrea medinaNessuna valutazione finora
- Capa de enlace de datos y capa físicaDocumento8 pagineCapa de enlace de datos y capa físicaStephanie ManceraNessuna valutazione finora
- Control de EnlaceDocumento27 pagineControl de Enlacecjesus_88Nessuna valutazione finora
- Diseño de CapasDocumento10 pagineDiseño de CapasDesconNessuna valutazione finora
- Requisitos de Un Bus de CampoDocumento5 pagineRequisitos de Un Bus de CampoGamaliel Perez50% (2)
- Resumen Del Capitulo 3 - Cynthia RiquelmeDocumento3 pagineResumen Del Capitulo 3 - Cynthia RiquelmeCynthia RiquelmeNessuna valutazione finora
- Las 7 capas del modelo OSI y sus funcionesDocumento19 pagineLas 7 capas del modelo OSI y sus funcioneszule123Nessuna valutazione finora
- Arquitectura de servidores y modelo cliente-servidorDocumento6 pagineArquitectura de servidores y modelo cliente-servidorakali rojaNessuna valutazione finora
- TEMA V Control de Enlace de DatosDocumento8 pagineTEMA V Control de Enlace de DatosLuis García lopezNessuna valutazione finora
- Servicios Orientados A La Conexión y Las Redes No Orientados A La ConexiónDocumento3 pagineServicios Orientados A La Conexión y Las Redes No Orientados A La ConexiónfarfzacNessuna valutazione finora
- Redes Tema 2 y 3Documento46 pagineRedes Tema 2 y 3HAA-BEENessuna valutazione finora
- La Capa de TransporteDocumento8 pagineLa Capa de TransportePedro GarciaNessuna valutazione finora
- Ejemplos en Redes para Primer ExamenDocumento119 pagineEjemplos en Redes para Primer ExamenFernando GalindoNessuna valutazione finora
- Protocolo TCP IPDocumento24 pagineProtocolo TCP IPAlonso MN100% (1)
- 1 Lección 3Documento15 pagine1 Lección 3NicolasNessuna valutazione finora
- Trabajo - Metodos de AccesoDocumento4 pagineTrabajo - Metodos de AccesoDanielSaniNessuna valutazione finora
- Capitulo2 Rev0Documento21 pagineCapitulo2 Rev0Arnoldo J. Perozo MenaNessuna valutazione finora
- Actividad para DesarrollarDocumento3 pagineActividad para DesarrollarMusicaSinCopyrightNessuna valutazione finora
- Funciones de La Capa 2 (Enlace de Datos) - Grupo 11Documento33 pagineFunciones de La Capa 2 (Enlace de Datos) - Grupo 11carmen riaNessuna valutazione finora
- Control de Acceso Al Medio CSMA CADocumento69 pagineControl de Acceso Al Medio CSMA CAManuelNessuna valutazione finora
- Resumen Capítulo 1 Comunicaciones y RedesDocumento39 pagineResumen Capítulo 1 Comunicaciones y RedesBLuis Ortega69% (13)
- Comunicaciones y Redes de Computadores, 7ma Edición. William Stallings - Por - SujkelDocumento4 pagineComunicaciones y Redes de Computadores, 7ma Edición. William Stallings - Por - SujkelMariano Velasquez MazoNessuna valutazione finora
- Resumen Tema2 PARDocumento16 pagineResumen Tema2 PARManuel VazquezNessuna valutazione finora
- 5 - Capa de Enlace de DatosDocumento16 pagine5 - Capa de Enlace de DatosJohannes ChristNessuna valutazione finora
- Cuestionario ProtocolosDocumento8 pagineCuestionario ProtocolosDerek BarretoNessuna valutazione finora
- Control de Acceso Al medio-MACDocumento21 pagineControl de Acceso Al medio-MACalder anthony anahueNessuna valutazione finora
- Trabajo Práctico 3Documento3 pagineTrabajo Práctico 3tecedkar1260Nessuna valutazione finora
- Unidad 1 RedesDocumento7 pagineUnidad 1 RedesAku GamesNessuna valutazione finora
- 2.1. Capa de Enlace de Datos Acceso Al Medio PDFDocumento3 pagine2.1. Capa de Enlace de Datos Acceso Al Medio PDFLullaby YanNessuna valutazione finora
- Tema IV (Enlace de Datos)Documento19 pagineTema IV (Enlace de Datos)Jorge W. Orellana AraozNessuna valutazione finora
- 03 - Clase N°3 - Capa de Enlace de DatosDocumento13 pagine03 - Clase N°3 - Capa de Enlace de DatosNicolás La TorreNessuna valutazione finora
- DNP3Documento7 pagineDNP3Francisco RamosNessuna valutazione finora
- Modelo de Referencia OSIDocumento13 pagineModelo de Referencia OSIturistologovzla2010100% (1)
- Servicios Orientados A La ConexionDocumento5 pagineServicios Orientados A La ConexionDiegoGuzmanNessuna valutazione finora
- Modems asíncronos y síncronosDocumento25 pagineModems asíncronos y síncronosEvelyn GomezNessuna valutazione finora
- Protocolos - GenesisDocumento6 pagineProtocolos - GenesisGénesis GabriellaNessuna valutazione finora
- Redes IP Protocolos Tipos de Servidores y ServiciosDocumento107 pagineRedes IP Protocolos Tipos de Servidores y ServiciosenigmadossierNessuna valutazione finora
- Capitulo 4. Sistema de ComunicacionesDocumento41 pagineCapitulo 4. Sistema de ComunicacionesDanilo GarcíaNessuna valutazione finora
- UF1875 - Gestión de recursos, servicios y de la red de comunicacionesDa EverandUF1875 - Gestión de recursos, servicios y de la red de comunicacionesNessuna valutazione finora
- Desarrollo del proyecto de la red telemática. IFCT0410Da EverandDesarrollo del proyecto de la red telemática. IFCT0410Nessuna valutazione finora
- Prácticas de redes de datos e industrialesDa EverandPrácticas de redes de datos e industrialesValutazione: 4 su 5 stelle4/5 (5)
- Catalogo Comercial Tupunatron 2017Documento180 pagineCatalogo Comercial Tupunatron 2017JM CuevasNessuna valutazione finora
- F. Excel de Caidas VerticalesDocumento4 pagineF. Excel de Caidas VerticalesJosé Ispilco100% (1)
- MHT 10120 L Cap.0 ES 09-07 - 1.0.0 MttoDocumento7 pagineMHT 10120 L Cap.0 ES 09-07 - 1.0.0 MttoRené Seyer Espatacus100% (1)
- Análisis granulométrico por tamizado en secoDocumento1 paginaAnálisis granulométrico por tamizado en secoTaliaNessuna valutazione finora
- TELEFONÍA CABLEMAS: FUNDAMENTOS Y COMPONENTESDocumento48 pagineTELEFONÍA CABLEMAS: FUNDAMENTOS Y COMPONENTESLlulisam ItzaNessuna valutazione finora
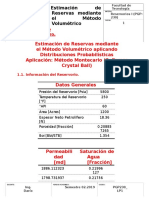
- Estimación de reservas mediante el método volumétricoDocumento3 pagineEstimación de reservas mediante el método volumétricofernando4talaveraNessuna valutazione finora
- Test KingDocumento906 pagineTest KinglgallardovNessuna valutazione finora
- Esparcidores de Materiales PetreosDocumento6 pagineEsparcidores de Materiales PetreosAlexisJhonsonNessuna valutazione finora
- Esp. Tec SuministroDocumento79 pagineEsp. Tec SuministroluisornaNessuna valutazione finora
- Prueba de Red LocalDocumento3 paginePrueba de Red LocalanyculNessuna valutazione finora
- Diagrama de flujo de plantas de procesoDocumento68 pagineDiagrama de flujo de plantas de procesoAAAAANessuna valutazione finora
- Norma de La CalidadDocumento2 pagineNorma de La CalidadRichard GoitíaNessuna valutazione finora
- Induccion General SysoDocumento20 pagineInduccion General Sysoclubdesocios.sergioNessuna valutazione finora
- Manual de Correo en Linux CentOS 7Documento16 pagineManual de Correo en Linux CentOS 7Juan Carlos RodriguezNessuna valutazione finora
- NTC1457 6Documento11 pagineNTC1457 6Ivan Dario Oyola RaveloNessuna valutazione finora
- ISO 128 Es Un Estándar InternacionalDocumento8 pagineISO 128 Es Un Estándar InternacionalLuiizs Caballero71% (7)
- Comunicación Del Parque EólicoDocumento3 pagineComunicación Del Parque EólicoJhon Henry Arreaga CarpioNessuna valutazione finora
- Los Reguladores AmericanosDocumento29 pagineLos Reguladores AmericanosLuis Orueta BlancoNessuna valutazione finora
- Normas Oficiales Mexicanas y servicios DGNDocumento5 pagineNormas Oficiales Mexicanas y servicios DGNDiego MuñozNessuna valutazione finora
- 10.0.1.2 Class Activity - What Would Happen If. InstructionsDocumento2 pagine10.0.1.2 Class Activity - What Would Happen If. InstructionsJosep Alexander Gutierrez ReyesNessuna valutazione finora
- Manual básico WHM panel control hostingDocumento3 pagineManual básico WHM panel control hostingCreainnova ConsultoresNessuna valutazione finora
- Manual para Servidores VirtualesDocumento196 pagineManual para Servidores VirtualesJesus Torres100% (1)
- PILAS en CDocumento4 paginePILAS en CDan Abdel Ortiz DuranNessuna valutazione finora
- Introducción AL MODELO OSIDocumento6 pagineIntroducción AL MODELO OSIMARCELOBJSNessuna valutazione finora
- Normas Iso para RedesDocumento10 pagineNormas Iso para RedesAlan CastroNessuna valutazione finora
- Guía Pie de ReyDocumento8 pagineGuía Pie de ReyRebeParrero100% (3)
- KNX Avanzado Zennio Spain 2014Documento9 pagineKNX Avanzado Zennio Spain 2014Leonardo Villamil DominguezNessuna valutazione finora
- Exposicion Sobre La Eficiencia EnergeticaDocumento134 pagineExposicion Sobre La Eficiencia Energeticajoan davidNessuna valutazione finora
- Libro Instrucciones Termo 2015Documento4 pagineLibro Instrucciones Termo 2015eariasz69Nessuna valutazione finora
- Poza A TierraDocumento1 paginaPoza A TierraluienrikNessuna valutazione finora