Potrebbero piacerti anche
- Exponential & Logarithmic FunctionsDocumento13 pagineExponential & Logarithmic FunctionsRahul SankaranNessuna valutazione finora
- Data Structures and AlgorithmsDocumento45 pagineData Structures and AlgorithmsKeith Tanaka MagakaNessuna valutazione finora
- Abrasive Blast Nozzle Catalog: Bringing Ceramic Technology To Industry Boride P Roduct SDocumento46 pagineAbrasive Blast Nozzle Catalog: Bringing Ceramic Technology To Industry Boride P Roduct SSamsu SamsNessuna valutazione finora
- Water Reducing - Retarding AdmixturesDocumento17 pagineWater Reducing - Retarding AdmixturesAbdullah PathanNessuna valutazione finora
- Sip TrainingDocumento96 pagineSip Trainingronics123Nessuna valutazione finora
- A Case Study On Projectile MotionDocumento6 pagineA Case Study On Projectile MotionEditor IJTSRDNessuna valutazione finora
- Simple analytical description of projectile motion with quadratic drag forceDocumento5 pagineSimple analytical description of projectile motion with quadratic drag forcebenitogaldos19gmail.comNessuna valutazione finora
- Vtol Design PDFDocumento25 pagineVtol Design PDFElner CrystianNessuna valutazione finora
- Facilities Assignment 1-2-2015Documento2 pagineFacilities Assignment 1-2-2015Xnort G. Xwest0% (1)
- MATLAB Code For Structural Analysis of 2-D Structures Subjected To Static and Self-Weight Loading ConditionsDocumento9 pagineMATLAB Code For Structural Analysis of 2-D Structures Subjected To Static and Self-Weight Loading Conditionsvine videosNessuna valutazione finora
- The Extended Rayleigh-Ritz Method For An Analysis of Nonlinear VibrationsDocumento7 pagineThe Extended Rayleigh-Ritz Method For An Analysis of Nonlinear VibrationsGuilherme NagaeNessuna valutazione finora
- Haar Wavelet Collocation Method For Three-Dimensional Elliptic Partial Differential EquationsDocumento12 pagineHaar Wavelet Collocation Method For Three-Dimensional Elliptic Partial Differential EquationsMarco AntonioNessuna valutazione finora
- Journal of Engineering and Applied Science 10Documento13 pagineJournal of Engineering and Applied Science 10naresh kotraNessuna valutazione finora
- Symmetry Factors of Feynman Diagrams For Scalar FieldsDocumento19 pagineSymmetry Factors of Feynman Diagrams For Scalar FieldsShourya MukherjeeNessuna valutazione finora
- AAS - 3D - Spirals - Three-Dimensional Generalized Logarithmic SpiralsDocumento21 pagineAAS - 3D - Spirals - Three-Dimensional Generalized Logarithmic Spiralsjohn_k7408Nessuna valutazione finora
- Subleading Corrections To The Double Coset Ansatz Preserve IntegrabilityDocumento40 pagineSubleading Corrections To The Double Coset Ansatz Preserve IntegrabilitycrocoaliNessuna valutazione finora
- The Integrability of Lie-Invariant Geometric Objects Generated by Ideals in The Grassmann AlgebraDocumento14 pagineThe Integrability of Lie-Invariant Geometric Objects Generated by Ideals in The Grassmann AlgebralarrylynnmailNessuna valutazione finora
- YJNTH4624Documento19 pagineYJNTH4624Zaordoz ZedNessuna valutazione finora
- Leapfrog Methods For Relativistic Charged-Particle DynamicsDocumento18 pagineLeapfrog Methods For Relativistic Charged-Particle DynamicsDr-Junaid ShajuNessuna valutazione finora
- RCSM D 21 00214Documento34 pagineRCSM D 21 00214M. PriyaNessuna valutazione finora
- Applications of Linear Algebra in Communication: January 2011Documento10 pagineApplications of Linear Algebra in Communication: January 2011M Chandan ShankarNessuna valutazione finora
- LINEAR ALGEBRA IN COMMUNICATIONDocumento10 pagineLINEAR ALGEBRA IN COMMUNICATIONM Chandan ShankarNessuna valutazione finora
- Numerical Linear Algebra and Matrix Analysis: Higham, Nicholas J. 2015Documento20 pagineNumerical Linear Algebra and Matrix Analysis: Higham, Nicholas J. 2015MauricioNessuna valutazione finora
- Optimization on Constrained Spectral ClusteringDocumento7 pagineOptimization on Constrained Spectral ClusteringAbel ThangarajaNessuna valutazione finora
- Blagouchine Malmsten Integrals and Their Evaluation by Contour Integration Methods Ramanujan J 2014Documento96 pagineBlagouchine Malmsten Integrals and Their Evaluation by Contour Integration Methods Ramanujan J 2014Creative MathNessuna valutazione finora
- Principal Component Analysis (PCA) Application To Images: Outline of The LectureDocumento26 paginePrincipal Component Analysis (PCA) Application To Images: Outline of The LectureLeonardo Antunes FerreiraNessuna valutazione finora
- On The Nite Displacement Analysis of Quadrangular Plates: A.V. Singh, Y. ElaghabashDocumento14 pagineOn The Nite Displacement Analysis of Quadrangular Plates: A.V. Singh, Y. ElaghabashGeethika KadhamNessuna valutazione finora
- A Finite Element Solution of The Beam Equation Via MATLAB: Applied Science and Engineering Progress October 2012Documento10 pagineA Finite Element Solution of The Beam Equation Via MATLAB: Applied Science and Engineering Progress October 2012Kartika AhujaNessuna valutazione finora
- Computers, Materials & ContinuaDocumento17 pagineComputers, Materials & ContinuaDr. NasreenNessuna valutazione finora
- The Geometry of Geometries: Matroid Theory, Old and New: Federico Ardila-MantillaDocumento31 pagineThe Geometry of Geometries: Matroid Theory, Old and New: Federico Ardila-MantillaKanan MahammadliNessuna valutazione finora
- Lecture 1Documento23 pagineLecture 1Mohammad NemrawiNessuna valutazione finora
- Symmetric Contours and Convergent Interpolation: SciencedirectDocumento30 pagineSymmetric Contours and Convergent Interpolation: Sciencedirectalizadeh2627Nessuna valutazione finora
- History FemDocumento14 pagineHistory FemHassan AeroNessuna valutazione finora
- Closed Form Numerical Integration Formulae For A Four-Node Convex Quadrilateral Finite ElementDocumento5 pagineClosed Form Numerical Integration Formulae For A Four-Node Convex Quadrilateral Finite ElementMd. Shafiqul IslamNessuna valutazione finora
- Analyse FunctionaalDocumento10 pagineAnalyse FunctionaalSoumi MaityNessuna valutazione finora
- Numerical Quadratures For Singular and Hypersingular Integrals in Boundary Element MethodsDocumento10 pagineNumerical Quadratures For Singular and Hypersingular Integrals in Boundary Element MethodsFab MorlandoNessuna valutazione finora
- Tasi2022 002Documento11 pagineTasi2022 002lev76Nessuna valutazione finora
- ω-circulant operator matrices and ω-circulant algebra: MathematicsDocumento16 pagineω-circulant operator matrices and ω-circulant algebra: MathematicsCRISTIANNessuna valutazione finora
- Maxwell-Like Equations for Dirac ElectronsDocumento6 pagineMaxwell-Like Equations for Dirac ElectronsMartinAlfonsNessuna valutazione finora
- The Generalized Spectral Radius and Extremal Norms: Fabian WirthDocumento24 pagineThe Generalized Spectral Radius and Extremal Norms: Fabian WirthMohammad SoroushNessuna valutazione finora
- Study of Linear Transformation and Its ApplicationDocumento9 pagineStudy of Linear Transformation and Its ApplicationSeerat BatoolNessuna valutazione finora
- Almost Sharp Front EvolutionDocumento4 pagineAlmost Sharp Front EvolutionNeil JethaniNessuna valutazione finora
- Numerical Study of Two-Dimensional Transient Heat Conduction Using Finite Element MethodDocumento10 pagineNumerical Study of Two-Dimensional Transient Heat Conduction Using Finite Element MethodIman NoorNessuna valutazione finora
- Worked Examples On Using The Riemann Integral and The Fundamental of Calculus For Integration Over A Polygonal ElementDocumento32 pagineWorked Examples On Using The Riemann Integral and The Fundamental of Calculus For Integration Over A Polygonal ElementValentin MotocNessuna valutazione finora
- A Starting Point Strategy For Nonlinear Interior Methods: Applied Mathematics LettersDocumento8 pagineA Starting Point Strategy For Nonlinear Interior Methods: Applied Mathematics LettersValentino LunardiNessuna valutazione finora
- 1 s2.0 S0377042713004202 MainDocumento16 pagine1 s2.0 S0377042713004202 MainKubra AksoyNessuna valutazione finora
- ABCD Matrices As Similarity Transformations of Wigner Matrices and Periodic Systems in OpticsDocumento18 pagineABCD Matrices As Similarity Transformations of Wigner Matrices and Periodic Systems in OpticsUmair SiddiqueNessuna valutazione finora
- Hamilton and Jacobi Come Full Circle: Jacobi Algorithms For Structured Hamiltonian EigenproblemsDocumento44 pagineHamilton and Jacobi Come Full Circle: Jacobi Algorithms For Structured Hamiltonian EigenproblemsAishika PalNessuna valutazione finora
- Finite Element Formulation For Stability and FreeDocumento7 pagineFinite Element Formulation For Stability and FreeValerioNessuna valutazione finora
- Random Matrix TheoryDocumento65 pagineRandom Matrix TheoryHaider AlSabbaghNessuna valutazione finora
- 229 393 1 PBDocumento6 pagine229 393 1 PBLakshya SinghalNessuna valutazione finora
- New Method of Feature Fusion Using Canonical Correlation AnalysisDocumento12 pagineNew Method of Feature Fusion Using Canonical Correlation AnalysisUma TamilNessuna valutazione finora
- Sun Et Al. - 2005 - A New Method of Feature Fusion and Its ApplicationDocumento12 pagineSun Et Al. - 2005 - A New Method of Feature Fusion and Its Applicationseyfu mogesNessuna valutazione finora
- Application of Residue Theorem To Solve Several ReDocumento7 pagineApplication of Residue Theorem To Solve Several ReJekkoi SihombingNessuna valutazione finora
- Quantum OpticsDocumento24 pagineQuantum OpticsNadia BrzostowiczNessuna valutazione finora
- Journal of Computational and Applied Mathematics: Zhong-Zhi Bai, Xi YangDocumento15 pagineJournal of Computational and Applied Mathematics: Zhong-Zhi Bai, Xi YangJese MadridNessuna valutazione finora
- Strass LerDocumento52 pagineStrass LerCarlosBuriticaNessuna valutazione finora
- Path Integrals by WeikbergDocumento35 paginePath Integrals by WeikbergDevidutta GahanNessuna valutazione finora
- Symmetry: Inversion of Tridiagonal Matrices Using The Dunford-Taylor's IntegralDocumento9 pagineSymmetry: Inversion of Tridiagonal Matrices Using The Dunford-Taylor's Integralarshiya tajNessuna valutazione finora
- DQ+Bspline 1Documento24 pagineDQ+Bspline 1Laila FouadNessuna valutazione finora
- Analytical Hartree-Fock Gradients For Periodic Systems: K. Doll, V. R. Saunders and N. M. HarrisonDocumento31 pagineAnalytical Hartree-Fock Gradients For Periodic Systems: K. Doll, V. R. Saunders and N. M. Harrisontestonly261Nessuna valutazione finora
- Unit Workbook 1: SampleDocumento16 pagineUnit Workbook 1: SampleP PadmavathiNessuna valutazione finora
- Gabor Frames in Finite DimensionsDocumento45 pagineGabor Frames in Finite DimensionsRosana RadovićNessuna valutazione finora
- Unit IV Multiple Integrals 19112014Documento34 pagineUnit IV Multiple Integrals 19112014adarshNessuna valutazione finora
- Quantum Gauge Theories On Noncommutative 3-d Space: Antoine G Er E, Patrizia Vitale and Jean-Christophe WalletDocumento25 pagineQuantum Gauge Theories On Noncommutative 3-d Space: Antoine G Er E, Patrizia Vitale and Jean-Christophe WalletcrocoaliNessuna valutazione finora
- Data Clustering with Quantum MechanicsDocumento17 pagineData Clustering with Quantum MechanicsTaher JelleliNessuna valutazione finora
- A Course of Mathematics for Engineers and ScientistsDa EverandA Course of Mathematics for Engineers and ScientistsNessuna valutazione finora
- PhDThesis MohsenDocumento154 paginePhDThesis MohsenAnax SouzaNessuna valutazione finora
- 10 1 1 632 6722 PDFDocumento72 pagine10 1 1 632 6722 PDFAnax SouzaNessuna valutazione finora
- PhDThesis MohsenDocumento154 paginePhDThesis MohsenAnax SouzaNessuna valutazione finora
- CT Teleinfo XX 2012 04Documento51 pagineCT Teleinfo XX 2012 04Anax SouzaNessuna valutazione finora
- Finite Element Method Using Pro ENGINEER and ANSYSDocumento15 pagineFinite Element Method Using Pro ENGINEER and ANSYSPrithviraj Daga100% (3)
- Fatigue Strength of Fillet Welded Structural Steels - Finite Elements, Strain Gauges and Reality PDFDocumento9 pagineFatigue Strength of Fillet Welded Structural Steels - Finite Elements, Strain Gauges and Reality PDFAnax SouzaNessuna valutazione finora
- Matlab FemDocumento45 pagineMatlab Femsohailrao100% (3)
- ANSYS TUTORIAL - 2D Fracture AnalysisDocumento15 pagineANSYS TUTORIAL - 2D Fracture AnalysisMahdiNessuna valutazione finora
- SURP Engineering 5 PDFDocumento8 pagineSURP Engineering 5 PDFAnax SouzaNessuna valutazione finora
- CognitiveDocumento31 pagineCognitiveSuhail AgaNessuna valutazione finora
- Electrocraft EAD BLDC CatalogDocumento16 pagineElectrocraft EAD BLDC CatalogElectromateNessuna valutazione finora
- Ze500 4 Parts Catalog en UsDocumento9 pagineZe500 4 Parts Catalog en UsClaudia LopezNessuna valutazione finora
- Delta VFD E Series User ManualDocumento399 pagineDelta VFD E Series User ManualTendai AlfaceNessuna valutazione finora
- Front Panel & Display Technical Data: User ManualDocumento2 pagineFront Panel & Display Technical Data: User ManualJulio PorleyNessuna valutazione finora
- Five Factors of CleaningDocumento2 pagineFive Factors of CleaningKimberly Bruce De CastroNessuna valutazione finora
- NewsDocumento26 pagineNewsMaria Jose Soliz OportoNessuna valutazione finora
- Unit-I-2-Marks-With-Ans3 Hydrology1 - BY Civildatas - Blogspot.in PDFDocumento4 pagineUnit-I-2-Marks-With-Ans3 Hydrology1 - BY Civildatas - Blogspot.in PDFHimanshu sharmaNessuna valutazione finora
- ITTC Validation of ManoeuvringDocumento11 pagineITTC Validation of ManoeuvringFelipe IlhaNessuna valutazione finora
- BetaDocumento16 pagineBetaAkshita Saxena100% (2)
- VSD Operacion ControlDocumento138 pagineVSD Operacion ControlLeon PerezNessuna valutazione finora
- GenEd Mathematics LLL PDFDocumento32 pagineGenEd Mathematics LLL PDFArmely NiedoNessuna valutazione finora
- Haidarali-MR-2011-PhD-Thesis 01 PDFDocumento378 pagineHaidarali-MR-2011-PhD-Thesis 01 PDFIbrahim KhanNessuna valutazione finora
- Public Key Cryptography: S. Erfani, ECE Dept., University of Windsor 0688-558-01 Network SecurityDocumento7 paginePublic Key Cryptography: S. Erfani, ECE Dept., University of Windsor 0688-558-01 Network SecurityAbrasaxEimi370Nessuna valutazione finora
- Module 4 - What Is The Required Rate of ReturnDocumento2 pagineModule 4 - What Is The Required Rate of ReturnEthics BAENessuna valutazione finora
- 01-Jul-21 03:32 PMDocumento6 pagine01-Jul-21 03:32 PMramNessuna valutazione finora
- Recommended Procedures For Internet-Based Connections Between Rths and Nmcs (VPN, Ipsec)Documento38 pagineRecommended Procedures For Internet-Based Connections Between Rths and Nmcs (VPN, Ipsec)Crismaruc Maria-madalinaNessuna valutazione finora
- Design of Shaft Straightening MachineDocumento58 pagineDesign of Shaft Straightening MachineChiragPhadkeNessuna valutazione finora
- Ema 312 Unit 4Documento22 pagineEma 312 Unit 4Ahbyna AmorNessuna valutazione finora
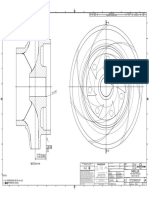
- Impeller: REV Rev by Description PCN / Ecn Date CHK'D A JMM Released For Production N/A 18/11/2019 PDLDocumento1 paginaImpeller: REV Rev by Description PCN / Ecn Date CHK'D A JMM Released For Production N/A 18/11/2019 PDLSenthilkumar RamalingamNessuna valutazione finora
- Pneumatic Tyres: CMR Engineering CollegeDocumento17 paginePneumatic Tyres: CMR Engineering CollegeHemanth Rama Krishna YernagulaNessuna valutazione finora
- Design Plan: A Performance Task in GeometryDocumento12 pagineDesign Plan: A Performance Task in GeometryRobert Ryan SantiagoNessuna valutazione finora
- Lecture 1: Encoding Language: LING 1330/2330: Introduction To Computational Linguistics Na-Rae HanDocumento18 pagineLecture 1: Encoding Language: LING 1330/2330: Introduction To Computational Linguistics Na-Rae HanLaura AmwayiNessuna valutazione finora
- ISO 8243 2013 Cigarettes - SamplingDocumento18 pagineISO 8243 2013 Cigarettes - SamplingEko YuliantoNessuna valutazione finora