Potrebbero piacerti anche
- Electronic System Design - ESD SyllabusDocumento3 pagineElectronic System Design - ESD SyllabusAnoop MathewNessuna valutazione finora
- 2pmEditFYP Interum (IOT Based VFD) 2 Semester 8Documento58 pagine2pmEditFYP Interum (IOT Based VFD) 2 Semester 8Salman H Yousafzai100% (1)
- 4X4 Keypad Based Password With ATmega32 (LCD Display)Documento6 pagine4X4 Keypad Based Password With ATmega32 (LCD Display)Emin KültürelNessuna valutazione finora
- EEE431 Module 2Documento27 pagineEEE431 Module 2Victor ImehNessuna valutazione finora
- HW 6Documento3 pagineHW 6Miles GrubbsNessuna valutazione finora
- Recommendation LetterDocumento4 pagineRecommendation LetterTalha YousufNessuna valutazione finora
- Top 101 High Frequency GRE Words - CrunchPrep GREDocumento12 pagineTop 101 High Frequency GRE Words - CrunchPrep GRETalha Yousuf100% (2)
- Combined System For Seismics & Electrical Imaging Series 16SG24-NDocumento2 pagineCombined System For Seismics & Electrical Imaging Series 16SG24-NdurvalNessuna valutazione finora
- Wireless Arduino Programming Board: Nternational Ournal of Nnovative Esearch in Omputer and Ommunication NgineeringDocumento5 pagineWireless Arduino Programming Board: Nternational Ournal of Nnovative Esearch in Omputer and Ommunication Ngineeringandra joniNessuna valutazione finora
- Efficient Automatic Plant Irrigation System Using ATMEGA MicrocontrollerDocumento4 pagineEfficient Automatic Plant Irrigation System Using ATMEGA MicrocontrollerSatyanarayan MahantaNessuna valutazione finora
- BBGDocumento8 pagineBBGGrandeurNessuna valutazione finora
- What Is Speaker ?Documento3 pagineWhat Is Speaker ?Siva ViratNessuna valutazione finora
- Solar Power Inverter ProjectDocumento15 pagineSolar Power Inverter ProjectAyon Datta100% (2)
- Automatic Led Emergency LightDocumento20 pagineAutomatic Led Emergency LightSanjivee SachinNessuna valutazione finora
- Arduino Based Vehicle Accident Alert System Using GPS, GSM and AccelerometerDocumento9 pagineArduino Based Vehicle Accident Alert System Using GPS, GSM and AccelerometerNihal Al Rafi0% (1)
- Eee-III-Analog Electronic Circuits (15ee34) - SolutionDocumento48 pagineEee-III-Analog Electronic Circuits (15ee34) - SolutionchaitanyaNessuna valutazione finora
- Mx3ipg2a PDFDocumento2 pagineMx3ipg2a PDFhieudaininhNessuna valutazione finora
- LM2907 LM2917 Conversor F - VDocumento18 pagineLM2907 LM2917 Conversor F - VAlejandra Vasquez GiraldoNessuna valutazione finora
- Hearing Aid (Project Report)Documento5 pagineHearing Aid (Project Report)Speech's ClubNessuna valutazione finora
- Unit-1:: Introduction To Basics of Industrial AutomationDocumento23 pagineUnit-1:: Introduction To Basics of Industrial Automationanuj jain100% (1)
- Power Factor Measurement & Correction: Prepared By: Guided byDocumento29 paginePower Factor Measurement & Correction: Prepared By: Guided bySunil PillaiNessuna valutazione finora
- Name of The Experiment-Design & Simulation of Differentiator Amplifier Using 741 Op-Amp IC. Instrument/ Components Required - Proteus Simulator. TheoryDocumento3 pagineName of The Experiment-Design & Simulation of Differentiator Amplifier Using 741 Op-Amp IC. Instrument/ Components Required - Proteus Simulator. TheoryBidyut Prasad dalai100% (1)
- PE&I questionbankIIIsemDocumento2 paginePE&I questionbankIIIsemSavita SomaNessuna valutazione finora
- Keil Interfacing Programs For 8051Documento10 pagineKeil Interfacing Programs For 8051harikrishna_ec594Nessuna valutazione finora
- Chapter-1: 1.1.1 The Principle of WindmillDocumento22 pagineChapter-1: 1.1.1 The Principle of WindmillVijay BavikattiNessuna valutazione finora
- Electronic Card Lock System Final Year Ece Project ReportDocumento17 pagineElectronic Card Lock System Final Year Ece Project ReportSunny Prasanth100% (3)
- Theory:: Experiment 3 Buck ConverterDocumento3 pagineTheory:: Experiment 3 Buck ConverterRAVI DUTTNessuna valutazione finora
- PV SolarDocumento10 paginePV SolarpedroNessuna valutazione finora
- SPWMDocumento16 pagineSPWMSatyanarayana GurramNessuna valutazione finora
- Solar Insect Killer - 20191106Documento17 pagineSolar Insect Killer - 20191106Vineet ChauhanNessuna valutazione finora
- IR Transmitter and Receiver Circuit DiagramDocumento21 pagineIR Transmitter and Receiver Circuit DiagramAndy ZhuNessuna valutazione finora
- Signal Multiplier Icc312Documento2 pagineSignal Multiplier Icc312supermannonNessuna valutazione finora
- 21-06-2021-1624264403-6-.-2. Engg - Voltage Based Control of Induction Motor Using Advanced Voice Recognition & Command SystemDocumento6 pagine21-06-2021-1624264403-6-.-2. Engg - Voltage Based Control of Induction Motor Using Advanced Voice Recognition & Command SystemImpact JournalsNessuna valutazione finora
- MTech (DCN) DEC-I ManualDocumento34 pagineMTech (DCN) DEC-I ManualMallikarjun DeshmukhNessuna valutazione finora
- MPPT Solar Charge Controller: Minor Project PresentationDocumento14 pagineMPPT Solar Charge Controller: Minor Project PresentationManikandan P Engineering EEENessuna valutazione finora
- Ultrasonic Distance Meter 1Documento21 pagineUltrasonic Distance Meter 1Naseef Parambattu PalliyaliNessuna valutazione finora
- 8.2 Project 8.2-Generating Pulse-Width Modulation WaveformDocumento8 pagine8.2 Project 8.2-Generating Pulse-Width Modulation WaveformDharanNessuna valutazione finora
- 12.1 Virtual Lab Link and Viva Questions (MCQ) For PART ADocumento6 pagine12.1 Virtual Lab Link and Viva Questions (MCQ) For PART Aresham k vNessuna valutazione finora
- Frequency To Voltage Converter ReportDocumento5 pagineFrequency To Voltage Converter ReportEssa SiddiquiNessuna valutazione finora
- Quartus Tutorial 2 Simulation PDFDocumento25 pagineQuartus Tutorial 2 Simulation PDFBill GonzálezNessuna valutazione finora
- Pure Sine Wave Inverter Project PDFDocumento5 paginePure Sine Wave Inverter Project PDFAnandu EkNessuna valutazione finora
- 1.speed Synchronization of Multiple MotorsDocumento89 pagine1.speed Synchronization of Multiple MotorsBhanu TummalapalliNessuna valutazione finora
- Logic Circuits and Switching Theory CPE 004 (TIP Reviewer)Documento4 pagineLogic Circuits and Switching Theory CPE 004 (TIP Reviewer)James LindoNessuna valutazione finora
- Bi-Directional DC-to-DC Converter For Solar Applications With Battery BackupDocumento5 pagineBi-Directional DC-to-DC Converter For Solar Applications With Battery BackupPaulius BruneikaNessuna valutazione finora
- Ece3364 Final Formulas PDFDocumento11 pagineEce3364 Final Formulas PDFnguyentran263Nessuna valutazione finora
- Ultrasonic Sensor Distance MeasuringDocumento25 pagineUltrasonic Sensor Distance Measuringjunaidadil100% (1)
- GSM Based Fault Monitoring SystemDocumento23 pagineGSM Based Fault Monitoring SystemSanjana Singh100% (1)
- Arduino Based RADAR SystemDocumento33 pagineArduino Based RADAR SystemKamalJeet Singh100% (5)
- Special Devices or Breakdown DevicesDocumento13 pagineSpecial Devices or Breakdown DevicesMuhammad Arif Rattar100% (1)
- A Development Platform For Microcontroller STM32F103Documento67 pagineA Development Platform For Microcontroller STM32F103picatilioNessuna valutazione finora
- Hybrid Solar InverterDocumento2 pagineHybrid Solar InverterSugun Kumar PedapudiNessuna valutazione finora
- DC AC InvertorDocumento61 pagineDC AC InvertorPaul TodericNessuna valutazione finora
- Experiment 2 - Iduction Motor Drive Using Slip Power RecoveryDocumento6 pagineExperiment 2 - Iduction Motor Drive Using Slip Power RecoveryDeepak BansalNessuna valutazione finora
- TC513 TC203 TC303Documento2 pagineTC513 TC203 TC303Ajay Kumar GiriNessuna valutazione finora
- Arduino Based Security SystemDocumento35 pagineArduino Based Security SystemSaurabh Deshmukh100% (1)
- Electronic Devices Final Exam Practice Problem WorkthroughsDocumento11 pagineElectronic Devices Final Exam Practice Problem WorkthroughsmrdantownsendNessuna valutazione finora
- Microcontroller Based Solar Charge Controller ProjectDocumento5 pagineMicrocontroller Based Solar Charge Controller ProjectAbir AhmedNessuna valutazione finora
- Arduino Based Home Energy MonitorDocumento29 pagineArduino Based Home Energy Monitorsurya tejaNessuna valutazione finora
- Scrolling Message Display - Project Report - Nov 15, 2011Documento71 pagineScrolling Message Display - Project Report - Nov 15, 2011Arun Arya33% (3)
- LDR Project RepoertDocumento35 pagineLDR Project Repoertsatvik100% (1)
- Threads in Dot Net - C#: ExampleDocumento12 pagineThreads in Dot Net - C#: ExampleRAMAKSNVNessuna valutazione finora
- 8th ExpDocumento12 pagine8th ExpusaravanakumarNessuna valutazione finora
- Python Advanced Programming: The Guide to Learn Python Programming. Reference with Exercises and Samples About Dynamical Programming, Multithreading, Multiprocessing, Debugging, Testing and MoreDa EverandPython Advanced Programming: The Guide to Learn Python Programming. Reference with Exercises and Samples About Dynamical Programming, Multithreading, Multiprocessing, Debugging, Testing and MoreNessuna valutazione finora
- RM PDFDocumento1 paginaRM PDFTalha YousufNessuna valutazione finora
- Robot Mechanics and Control RIME-811: Dr. Hasan SajidDocumento34 pagineRobot Mechanics and Control RIME-811: Dr. Hasan SajidTalha YousufNessuna valutazione finora
- Literature Search On Hybrid Brain Computer Interface Using EEG and fNIRSDocumento10 pagineLiterature Search On Hybrid Brain Computer Interface Using EEG and fNIRSTalha YousufNessuna valutazione finora
- Binomial Distribution and ApplicationsDocumento1 paginaBinomial Distribution and ApplicationsTalha YousufNessuna valutazione finora
- Data SetDocumento1.206 pagineData SetTalha YousufNessuna valutazione finora
- CourseraProgWeek1Instruction PDFDocumento2 pagineCourseraProgWeek1Instruction PDFTalha YousufNessuna valutazione finora
- Project ReportDocumento1 paginaProject ReportTalha YousufNessuna valutazione finora
- Bayesian Nonparametrics and The Probabilistic Approach To ModellingDocumento27 pagineBayesian Nonparametrics and The Probabilistic Approach To ModellingTalha YousufNessuna valutazione finora
- Time and Motion: Dr. Hasan SajidDocumento36 pagineTime and Motion: Dr. Hasan SajidTalha YousufNessuna valutazione finora
- Foundations of Artificial Intelligence: Cis20.2-Spring2010-Sklar-Leciv.1 1 Cis20.2-Spring2010-Sklar-Leciv.1 2Documento6 pagineFoundations of Artificial Intelligence: Cis20.2-Spring2010-Sklar-Leciv.1 1 Cis20.2-Spring2010-Sklar-Leciv.1 2Talha YousufNessuna valutazione finora
- Time and Motion: Dr. Hasan SajidDocumento33 pagineTime and Motion: Dr. Hasan SajidTalha YousufNessuna valutazione finora
- Chapter 3 - Support Vector Machine With Math. - Deep Math Machine Learning - Ai - MediumDocumento11 pagineChapter 3 - Support Vector Machine With Math. - Deep Math Machine Learning - Ai - MediumTalha YousufNessuna valutazione finora
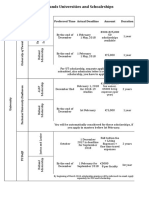
- Netherlands Universities and Schoalrships: Preferred Time Actual Deadline Amount DurationDocumento1 paginaNetherlands Universities and Schoalrships: Preferred Time Actual Deadline Amount DurationTalha YousufNessuna valutazione finora
- Lec 1Documento10 pagineLec 1Talha YousufNessuna valutazione finora
- SVM Tutorial: SVM - Understanding The Math - The Optimal HyperplaneDocumento13 pagineSVM Tutorial: SVM - Understanding The Math - The Optimal HyperplaneTalha YousufNessuna valutazione finora
- Support Vector Machines PDFDocumento37 pagineSupport Vector Machines PDFTalha YousufNessuna valutazione finora
- List of Agreed Restaurants PDFDocumento7 pagineList of Agreed Restaurants PDFTalha YousufNessuna valutazione finora
- How Do I Choose A Graduate SchoolDocumento2 pagineHow Do I Choose A Graduate SchoolTalha YousufNessuna valutazione finora
- Course Code Credit Hours Courses DescriptionDocumento2 pagineCourse Code Credit Hours Courses DescriptionTalha YousufNessuna valutazione finora
- Official Translators, Updated 15-July-2015Documento2 pagineOfficial Translators, Updated 15-July-2015Talha YousufNessuna valutazione finora
- Literature ReviewDocumento11 pagineLiterature ReviewTalha YousufNessuna valutazione finora
- Sample Email & Reference LetterDocumento2 pagineSample Email & Reference LetterTalha YousufNessuna valutazione finora
- A Benchmark of Dual Constellations GNSS Solutions For Vehicle Localization in Container TerminalsDocumento7 pagineA Benchmark of Dual Constellations GNSS Solutions For Vehicle Localization in Container TerminalsjfrasconNessuna valutazione finora
- LogcatDocumento2 pagineLogcatBLACK RAKESH YTNessuna valutazione finora
- DSE9474 DSE9484 Data Sheet PDFDocumento2 pagineDSE9474 DSE9484 Data Sheet PDFAung MhNessuna valutazione finora
- Zoning Brocade Switches-Creatng ConfigurationsDocumento2 pagineZoning Brocade Switches-Creatng ConfigurationsKirankumar RajaNessuna valutazione finora
- 4hana 1909Documento60 pagine4hana 1909ddharNessuna valutazione finora
- DatasheetDurem114 tcm40-2080Documento1 paginaDatasheetDurem114 tcm40-2080Gildardo FigueroaNessuna valutazione finora
- BCS301 Mathematics Model Question Paper 1Documento5 pagineBCS301 Mathematics Model Question Paper 1Rana ManalNessuna valutazione finora
- Number Theory (Róbert Freud, Edit Gyarmati)Documento563 pagineNumber Theory (Róbert Freud, Edit Gyarmati)Cyka BlyatNessuna valutazione finora
- Panasonic Pi hl1104xk Digital Video RecorderDocumento1 paginaPanasonic Pi hl1104xk Digital Video Recorderknown knownNessuna valutazione finora
- Ezra Pound PDFDocumento2 pagineEzra Pound PDFGaryNessuna valutazione finora
- Sans 1231Documento1 paginaSans 1231Sandro MeloNessuna valutazione finora
- Business Analyst JobDocumento9 pagineBusiness Analyst JobEdmond KeraNessuna valutazione finora
- Concept of ERS in SAP MMDocumento9 pagineConcept of ERS in SAP MMARABINDA CHAKRAVARTYNessuna valutazione finora
- Vrealize Automation TransitionDocumento93 pagineVrealize Automation TransitionBao Vy LeNessuna valutazione finora
- Ververica Platform Whitepaper Stream Processing For Real-Time Business, Powered by Apache Flink®Documento22 pagineVerverica Platform Whitepaper Stream Processing For Real-Time Business, Powered by Apache Flink®pinoNessuna valutazione finora
- 1532748281262Documento31 pagine1532748281262FranciscoNessuna valutazione finora
- Discussion Assignment 5Documento5 pagineDiscussion Assignment 5Nothando MkhwanaziNessuna valutazione finora
- Epicor University - Advanced Business Process Management Course PDFDocumento54 pagineEpicor University - Advanced Business Process Management Course PDFgvdaniel stpNessuna valutazione finora
- Aspect The Cloud and Physical Operations White PaperDocumento9 pagineAspect The Cloud and Physical Operations White PaperFredNessuna valutazione finora
- Va - Zvuk Osamdesetih - 1997 - Zabavna I Pop - 1982 - 1983Documento6 pagineVa - Zvuk Osamdesetih - 1997 - Zabavna I Pop - 1982 - 1983bozicna_jelkaNessuna valutazione finora
- Java MethodsDocumento4 pagineJava Methodslifemlk100% (1)
- Conversion Tools FormulaDocumento76 pagineConversion Tools Formulasunil suryavanshiNessuna valutazione finora
- When Data Visualization Works - and When It Doesn'tDocumento8 pagineWhen Data Visualization Works - and When It Doesn'tronald johannNessuna valutazione finora
- Part List - Piston & Rod Group PDFDocumento2 paginePart List - Piston & Rod Group PDFRahulNessuna valutazione finora
- KauneDocumento7 pagineKauneEnos Marcos Bastos100% (1)
- TD-W8961N (EU) V3 Quick Installation GuideDocumento2 pagineTD-W8961N (EU) V3 Quick Installation GuidePaweł RybiałekNessuna valutazione finora
- Finite-Length Discrete TransformsDocumento44 pagineFinite-Length Discrete TransformsThiruselvan ManianNessuna valutazione finora
- EEE Department Brochure - 02.04-1Documento3 pagineEEE Department Brochure - 02.04-1Sivaraman PandarinathanNessuna valutazione finora
- 9tut Q&aDocumento40 pagine9tut Q&alucaluca2Nessuna valutazione finora