Potrebbero piacerti anche
- Machine Learning Absolute Beginners Introduction 2ndDocumento128 pagineMachine Learning Absolute Beginners Introduction 2ndud90% (62)
- Top 101 High Frequency GRE Words - CrunchPrep GREDocumento12 pagineTop 101 High Frequency GRE Words - CrunchPrep GRETalha Yousuf100% (2)
- Hands On Bayesian Statistics With PythonDocumento12 pagineHands On Bayesian Statistics With PythonJar TesNessuna valutazione finora
- Recommendation LetterDocumento4 pagineRecommendation LetterTalha YousufNessuna valutazione finora
- Econometric Project - Linear Regression ModelDocumento17 pagineEconometric Project - Linear Regression ModelDiana RoșcaNessuna valutazione finora
- Assignment-Based Subjective Questions/AnswersDocumento3 pagineAssignment-Based Subjective Questions/AnswersrahulNessuna valutazione finora
- Process Performance Models: Statistical, Probabilistic & SimulationDa EverandProcess Performance Models: Statistical, Probabilistic & SimulationNessuna valutazione finora
- Answers Review Questions EconometricsDocumento59 pagineAnswers Review Questions EconometricsZX Lee84% (25)
- Practical Bayesian InferenceDocumento322 paginePractical Bayesian InferenceSinisa Hristov100% (1)
- Applied Time Series Modelling and ForecastingDocumento313 pagineApplied Time Series Modelling and Forecastingalicorpanao100% (2)
- OJO - RD 43-170 - GRI 04-0229 Guidelines For Reliability Based Design - 0900a86680125df2Documento236 pagineOJO - RD 43-170 - GRI 04-0229 Guidelines For Reliability Based Design - 0900a86680125df2Carlos Nieves0% (1)
- Estimation of The ParametersDocumento17 pagineEstimation of The Parametersgetachew getuNessuna valutazione finora
- Chapter 2 - Simple Linear Regression FunctionDocumento49 pagineChapter 2 - Simple Linear Regression FunctionErmias Atalay100% (1)
- CourseraProgWeek1Instruction PDFDocumento2 pagineCourseraProgWeek1Instruction PDFTalha YousufNessuna valutazione finora
- IEEE 1243 Metodo Estadistico para Descargas AtmosfericasDocumento5 pagineIEEE 1243 Metodo Estadistico para Descargas AtmosfericasSebastián AlmagroNessuna valutazione finora
- Chapter 6: How To Do Forecasting by Regression AnalysisDocumento7 pagineChapter 6: How To Do Forecasting by Regression AnalysisSarah Sally SarahNessuna valutazione finora
- Machine Learning and Pattern Recognition Bayesian Complexity ControlDocumento4 pagineMachine Learning and Pattern Recognition Bayesian Complexity ControlzeliawillscumbergNessuna valutazione finora
- Statistics NotesDocumento16 pagineStatistics NotesAnimesh Sah • 15 years ago • UpadatedNessuna valutazione finora
- Destercke 22 ADocumento11 pagineDestercke 22 AleftyjoyNessuna valutazione finora
- A Pattern Is An Abstract Object, Such As A Set of Measurements Describing A Physical ObjectDocumento12 pagineA Pattern Is An Abstract Object, Such As A Set of Measurements Describing A Physical Objectriddickdanish1Nessuna valutazione finora
- Perspectives On System IdentificationDocumento13 paginePerspectives On System Identificationsahar100% (1)
- Bayesian Modelling For Data Analysis and Learning From DataDocumento19 pagineBayesian Modelling For Data Analysis and Learning From DataJoan AlbiolNessuna valutazione finora
- Bayesian Analysis of Extreme Operational Losses: Chyng-Lan LiangDocumento17 pagineBayesian Analysis of Extreme Operational Losses: Chyng-Lan LiangOnkar BagariaNessuna valutazione finora
- Chapter 4 MLRDocumento17 pagineChapter 4 MLRmusamhlaba0329Nessuna valutazione finora
- ML Model Paper 2 SolutionDocumento15 pagineML Model Paper 2 SolutionVIKAS KUMARNessuna valutazione finora
- Mathematical ModelingDocumento33 pagineMathematical ModelingIsma OllshopNessuna valutazione finora
- Statistical ModelDocumento5 pagineStatistical ModelBOBBY212Nessuna valutazione finora
- Probability Concepts ExplainedDocumento10 pagineProbability Concepts ExplainedPetros PianoNessuna valutazione finora
- Statistical ModelDocumento6 pagineStatistical Modelhasan jamiNessuna valutazione finora
- COMP4702 Notes 2019: Week 2 - Supervised LearningDocumento23 pagineCOMP4702 Notes 2019: Week 2 - Supervised LearningKelbie DavidsonNessuna valutazione finora
- Data Analysis Recipes: Fitting A Model To DataDocumento55 pagineData Analysis Recipes: Fitting A Model To DataAlankarDuttaNessuna valutazione finora
- Gibbs Sampling For The UninitiatedDocumento23 pagineGibbs Sampling For The Uninitiatedmirando93Nessuna valutazione finora
- Empirical Bayes For Learning To LearnDocumento8 pagineEmpirical Bayes For Learning To Learnmariana henteaNessuna valutazione finora
- Graphical Models: Michael I. JordanDocumento16 pagineGraphical Models: Michael I. Jordanprasenjit_prodNessuna valutazione finora
- Model Evaluation and SelectionDocumento6 pagineModel Evaluation and SelectionKishore DevineniNessuna valutazione finora
- Assignment On Probit ModelDocumento17 pagineAssignment On Probit ModelNidhi KaushikNessuna valutazione finora
- StatsLecture1 ProbabilityDocumento4 pagineStatsLecture1 Probabilitychoi7Nessuna valutazione finora
- Evaluating Hypothesis: Bias in The Estimate. First, The Observed Accuracy of The Learned Hypothesis Over The TrainingDocumento17 pagineEvaluating Hypothesis: Bias in The Estimate. First, The Observed Accuracy of The Learned Hypothesis Over The TrainingPragnya Y SNessuna valutazione finora
- Uncertainty Assessment For Reconstructions Based On Deformable GeometryDocumento7 pagineUncertainty Assessment For Reconstructions Based On Deformable GeometryLata DeshmukhNessuna valutazione finora
- Noise-Contrastive Estimation: A New Estimation Principle For Unnormalized Statistical ModelsDocumento8 pagineNoise-Contrastive Estimation: A New Estimation Principle For Unnormalized Statistical ModelsAnton KuznetsovNessuna valutazione finora
- Deep Learning AnswersDocumento36 pagineDeep Learning AnswersmrunalNessuna valutazione finora
- Insppt 6Documento21 pagineInsppt 6Md Talha JavedNessuna valutazione finora
- Assignment-Based Subjective Questions/AnswersDocumento3 pagineAssignment-Based Subjective Questions/AnswersrahulNessuna valutazione finora
- Stuart 81Documento25 pagineStuart 81Sebastian CulquiNessuna valutazione finora
- Sodsod, B. D. S. - Assignment 01Documento6 pagineSodsod, B. D. S. - Assignment 01Bryan SodsodNessuna valutazione finora
- Flex MG ArchDocumento44 pagineFlex MG ArchsdfasdfkksfjNessuna valutazione finora
- Chi Squared TutorialDocumento5 pagineChi Squared Tutorialgalaxi.nongnong6291Nessuna valutazione finora
- C DLB EQz 1 PQKDocumento25 pagineC DLB EQz 1 PQKTheoNessuna valutazione finora
- BAStutorial Linear RegressionDocumento30 pagineBAStutorial Linear RegressionLuis LuengoNessuna valutazione finora
- Unit 1Documento21 pagineUnit 1read4freeNessuna valutazione finora
- B Da Lecture NotesDocumento152 pagineB Da Lecture NotesxolraxNessuna valutazione finora
- Semc 3 QDocumento9 pagineSemc 3 QshelygandhiNessuna valutazione finora
- 1 s2.0 S0001870896900377 MainDocumento67 pagine1 s2.0 S0001870896900377 MainMac UserNessuna valutazione finora
- Discriminative Generative: R Follow ADocumento18 pagineDiscriminative Generative: R Follow AChrsan Ram100% (1)
- Multicollinearity Assignment April 5Documento10 pagineMulticollinearity Assignment April 5Zeinm KhenNessuna valutazione finora
- Cowan Statistical Data AnalysisDocumento10 pagineCowan Statistical Data AnalysisBencédi GyulaNessuna valutazione finora
- DM Unit 2-5 NotesDocumento78 pagineDM Unit 2-5 NotesNandhini RNessuna valutazione finora
- What Is Linear RegressionDocumento14 pagineWhat Is Linear RegressionAvanijaNessuna valutazione finora
- Robust Risk Aggregation With Neural Networks: Stephan Eckstein Michael Kupper Mathias Pohl May 27, 2020Documento42 pagineRobust Risk Aggregation With Neural Networks: Stephan Eckstein Michael Kupper Mathias Pohl May 27, 2020Sam Moreno FernándezNessuna valutazione finora
- Nonparametric Quantile Regression: Ichiro Takeuchi Quoc V. Le Tim Sears Alexander J. SmolaDocumento32 pagineNonparametric Quantile Regression: Ichiro Takeuchi Quoc V. Le Tim Sears Alexander J. SmolaMannyNessuna valutazione finora
- A Conceptual Introduction To Markov Chain Monte Carlo MethodsDocumento56 pagineA Conceptual Introduction To Markov Chain Monte Carlo Methodstigetit596Nessuna valutazione finora
- 304BA AdvancedStatisticalMethodsUsingRDocumento31 pagine304BA AdvancedStatisticalMethodsUsingRshubhamatilkar04Nessuna valutazione finora
- ML Unit 2Documento21 pagineML Unit 22306603Nessuna valutazione finora
- 2 - Ijpast 512 V16N1.170230601Documento13 pagine2 - Ijpast 512 V16N1.170230601Ahmed FenneurNessuna valutazione finora
- Bishop2008 Chapter ANewFrameworkForMachineLearninDocumento24 pagineBishop2008 Chapter ANewFrameworkForMachineLearninMassimo TormenNessuna valutazione finora
- Simple Linear Regression: From Wikipedia, The Free EncyclopediaDocumento10 pagineSimple Linear Regression: From Wikipedia, The Free EncyclopediaGabriel OmarNessuna valutazione finora
- 14 Aos1260Documento31 pagine14 Aos1260Swapnaneel BhattacharyyaNessuna valutazione finora
- Important TemsDocumento61 pagineImportant TemskomalaNessuna valutazione finora
- A Weak Convergence Approach to the Theory of Large DeviationsDa EverandA Weak Convergence Approach to the Theory of Large DeviationsValutazione: 4 su 5 stelle4/5 (1)
- Robot Mechanics and Control RIME-811: Dr. Hasan SajidDocumento34 pagineRobot Mechanics and Control RIME-811: Dr. Hasan SajidTalha YousufNessuna valutazione finora
- RM PDFDocumento1 paginaRM PDFTalha YousufNessuna valutazione finora
- Literature Search On Hybrid Brain Computer Interface Using EEG and fNIRSDocumento10 pagineLiterature Search On Hybrid Brain Computer Interface Using EEG and fNIRSTalha YousufNessuna valutazione finora
- Binomial Distribution and ApplicationsDocumento1 paginaBinomial Distribution and ApplicationsTalha YousufNessuna valutazione finora
- Foundations of Artificial Intelligence: Cis20.2-Spring2010-Sklar-Leciv.1 1 Cis20.2-Spring2010-Sklar-Leciv.1 2Documento6 pagineFoundations of Artificial Intelligence: Cis20.2-Spring2010-Sklar-Leciv.1 1 Cis20.2-Spring2010-Sklar-Leciv.1 2Talha YousufNessuna valutazione finora
- Project ReportDocumento1 paginaProject ReportTalha YousufNessuna valutazione finora
- Data SetDocumento1.206 pagineData SetTalha YousufNessuna valutazione finora
- Chapter 3 - Support Vector Machine With Math. - Deep Math Machine Learning - Ai - MediumDocumento11 pagineChapter 3 - Support Vector Machine With Math. - Deep Math Machine Learning - Ai - MediumTalha YousufNessuna valutazione finora
- Arduino TimersDocumento31 pagineArduino TimersTalha YousufNessuna valutazione finora
- Time and Motion: Dr. Hasan SajidDocumento36 pagineTime and Motion: Dr. Hasan SajidTalha YousufNessuna valutazione finora
- Support Vector Machines PDFDocumento37 pagineSupport Vector Machines PDFTalha YousufNessuna valutazione finora
- Time and Motion: Dr. Hasan SajidDocumento33 pagineTime and Motion: Dr. Hasan SajidTalha YousufNessuna valutazione finora
- SVM Tutorial: SVM - Understanding The Math - The Optimal HyperplaneDocumento13 pagineSVM Tutorial: SVM - Understanding The Math - The Optimal HyperplaneTalha YousufNessuna valutazione finora
- List of Agreed Restaurants PDFDocumento7 pagineList of Agreed Restaurants PDFTalha YousufNessuna valutazione finora
- Lec 1Documento10 pagineLec 1Talha YousufNessuna valutazione finora
- How Do I Choose A Graduate SchoolDocumento2 pagineHow Do I Choose A Graduate SchoolTalha YousufNessuna valutazione finora
- Official Translators, Updated 15-July-2015Documento2 pagineOfficial Translators, Updated 15-July-2015Talha YousufNessuna valutazione finora
- Course Code Credit Hours Courses DescriptionDocumento2 pagineCourse Code Credit Hours Courses DescriptionTalha YousufNessuna valutazione finora
- Literature ReviewDocumento11 pagineLiterature ReviewTalha YousufNessuna valutazione finora
- Sample Email & Reference LetterDocumento2 pagineSample Email & Reference LetterTalha YousufNessuna valutazione finora
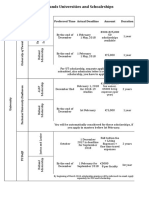
- Netherlands Universities and Schoalrships: Preferred Time Actual Deadline Amount DurationDocumento1 paginaNetherlands Universities and Schoalrships: Preferred Time Actual Deadline Amount DurationTalha YousufNessuna valutazione finora
- Big Data Analytics Quick GuideDocumento53 pagineBig Data Analytics Quick Guidesatheeshbabun100% (1)
- DST in Psychology PDFDocumento3 pagineDST in Psychology PDFwernsickleNessuna valutazione finora
- ML Overview NotesDocumento23 pagineML Overview NotesSAHINNessuna valutazione finora
- The Steps To Follow in A SAS Multiple Regression AnalysisDocumento12 pagineThe Steps To Follow in A SAS Multiple Regression AnalysisarijitroyNessuna valutazione finora
- How Many Clusters? Which Clustering Method? Answers Via Model-Based Cluster AnalysisDocumento22 pagineHow Many Clusters? Which Clustering Method? Answers Via Model-Based Cluster AnalysisFake nameNessuna valutazione finora
- A Guide To Model Selection For Survival AnalysisDocumento26 pagineA Guide To Model Selection For Survival AnalysisDebela NanessoNessuna valutazione finora
- IBM Slide CHAPTER 3Documento48 pagineIBM Slide CHAPTER 3Wen Xin GanNessuna valutazione finora
- Mathematical Modeling Using Linear RegresionDocumento52 pagineMathematical Modeling Using Linear RegresionIrinel IonutNessuna valutazione finora
- Francis Galton: Galton's Law of Universal Regression Tall Fathers Less Short Fathers Was GreaterDocumento18 pagineFrancis Galton: Galton's Law of Universal Regression Tall Fathers Less Short Fathers Was GreaterNavyashree B MNessuna valutazione finora
- 21st Century .PDF Efikasi, TeknologiDocumento11 pagine21st Century .PDF Efikasi, TeknologiSumathy RamasNessuna valutazione finora
- Stat VivaDocumento10 pagineStat VivaTanjima MahjabinNessuna valutazione finora
- Joreskog&Sorbom - LISREL 8 - Structural Equation Modeling With Simplis Command Language (1998) - Iki1pslDocumento12 pagineJoreskog&Sorbom - LISREL 8 - Structural Equation Modeling With Simplis Command Language (1998) - Iki1pslsoloenyale7510Nessuna valutazione finora
- Landslide Characteristics and Slope Instability Modeling Using GISDocumento16 pagineLandslide Characteristics and Slope Instability Modeling Using GISadela2012100% (1)
- Thesis Using Linear RegressionDocumento7 pagineThesis Using Linear Regressionpamelawrightvirginiabeach100% (1)
- Henderson Retail Credit ModelsDocumento22 pagineHenderson Retail Credit Modelsmentor_muhaxheriNessuna valutazione finora
- Nimble User ManualDocumento131 pagineNimble User ManualraksacNessuna valutazione finora
- Chapter 1Documento8 pagineChapter 1monicavelamaNessuna valutazione finora
- A Tutorial On Hidden Markov Models and Selected Applications in Speech RecognitionDocumento30 pagineA Tutorial On Hidden Markov Models and Selected Applications in Speech Recognitionazizd15Nessuna valutazione finora
- COX Lies Damned Lies and Rational Choice AnalysesDocumento19 pagineCOX Lies Damned Lies and Rational Choice AnalysesMelina MörschbächerNessuna valutazione finora
- Link Ratio MethodDocumento18 pagineLink Ratio MethodLuis ChioNessuna valutazione finora
- Fatigue Oriented Risk Based Inspection and Structural Health Monitoring of FPSOsDocumento12 pagineFatigue Oriented Risk Based Inspection and Structural Health Monitoring of FPSOsbarrysmith77Nessuna valutazione finora
- Belisa Aliyi - Assignments - For - EconometricsDocumento34 pagineBelisa Aliyi - Assignments - For - Econometricsfabrahim379Nessuna valutazione finora
- Econometricsnotes2 140407141735 Phpapp01 PDFDocumento23 pagineEconometricsnotes2 140407141735 Phpapp01 PDFEmil BinnyNessuna valutazione finora