Potrebbero piacerti anche
- Plane Frame and Grid EquationsDocumento63 paginePlane Frame and Grid EquationsAshutoshAparajNessuna valutazione finora
- Indetermine StructureDocumento8 pagineIndetermine Structuremaloy100% (1)
- Matrix Row Operations - AlgorithmDocumento21 pagineMatrix Row Operations - AlgorithmellonancyNessuna valutazione finora
- Prestressed Concrete LECTURE 1 PDFDocumento41 paginePrestressed Concrete LECTURE 1 PDFRenz Olex M. CanlasNessuna valutazione finora
- Section 1.2: Row Reduction and Echelon Forms Echelon Form (Or Row Echelon Form)Documento13 pagineSection 1.2: Row Reduction and Echelon Forms Echelon Form (Or Row Echelon Form)alyhamad50Nessuna valutazione finora
- 7) C3 Further Trigonometric Identities and Their ApplicationsDocumento45 pagine7) C3 Further Trigonometric Identities and Their ApplicationszzaanNessuna valutazione finora
- CMT MIDTERMS Compiled ExercisesDocumento21 pagineCMT MIDTERMS Compiled ExercisesTris ZackNessuna valutazione finora
- Chemistry 6 Properties of MatterDocumento45 pagineChemistry 6 Properties of Matteram203050% (2)
- QUIZ 5-One Way SlabDocumento1 paginaQUIZ 5-One Way SlabMac KYNessuna valutazione finora
- Double Integration MethodDocumento10 pagineDouble Integration Methodmau_boi16100% (1)
- Frame AnalysisDocumento4 pagineFrame AnalysisSyed Mohd MehdiNessuna valutazione finora
- Lecture Notes On Statics of Rigid BodiesDocumento184 pagineLecture Notes On Statics of Rigid BodiesLeandro S. DaceraNessuna valutazione finora
- Plane and Solid Geom Problem Set PDFDocumento1 paginaPlane and Solid Geom Problem Set PDFRenz FernandezNessuna valutazione finora
- PDF Simplified Reinforced Concrete Design 2010 NSCPDocumento200 paginePDF Simplified Reinforced Concrete Design 2010 NSCPMeverlyn RoqueroNessuna valutazione finora
- Center of GravityDocumento33 pagineCenter of GravitynellaNessuna valutazione finora
- Buckling of Columns: Mechanics of Deformable Bodies IDocumento13 pagineBuckling of Columns: Mechanics of Deformable Bodies IJolina PagulayanNessuna valutazione finora
- Exp-9 Bending Test On Wooden BeamDocumento8 pagineExp-9 Bending Test On Wooden BeamsushilkumarNessuna valutazione finora
- Xinrong Li - Reinforced Concrete Column Under Seismic Lateral ForceDocumento367 pagineXinrong Li - Reinforced Concrete Column Under Seismic Lateral ForceNicola RizzatoNessuna valutazione finora
- Chapter 2 - AUS PDFDocumento29 pagineChapter 2 - AUS PDFMongi Ben OuezdouNessuna valutazione finora
- Slides - Chapter 2.0 - Displacement Determinate TrussDocumento33 pagineSlides - Chapter 2.0 - Displacement Determinate TrussEchaNurulAisyahNessuna valutazione finora
- Theory of Structures-II (CE-3152) Short Answered Questions 2015Documento3 pagineTheory of Structures-II (CE-3152) Short Answered Questions 2015Santosh KumarNessuna valutazione finora
- Module 9 - Shear & Moment DiagramDocumento25 pagineModule 9 - Shear & Moment DiagramJerome Garganera100% (1)
- Shear & Moment DiagramsDocumento18 pagineShear & Moment DiagramsKwaku SoloNessuna valutazione finora
- Module 1 Mechanics of Deformable BodiesDocumento3 pagineModule 1 Mechanics of Deformable BodiesWency LagumbayNessuna valutazione finora
- UNIT-1 Structural Analysis-1 220716Documento96 pagineUNIT-1 Structural Analysis-1 220716Azrin YusopNessuna valutazione finora
- Plate No. 1 ST314 - Structural Theory: Don Honorio Ventura State UniversityDocumento4 paginePlate No. 1 ST314 - Structural Theory: Don Honorio Ventura State UniversityRamil T. TrinidadNessuna valutazione finora
- Principles of Steel Design SetaDocumento5 paginePrinciples of Steel Design Setajek vinNessuna valutazione finora
- Reinforced Concrete Design - Palestine Ii - ACI 318M-08Documento282 pagineReinforced Concrete Design - Palestine Ii - ACI 318M-08EVER GUZMAN BALCASNessuna valutazione finora
- Lectura 2 - EarthquakesDocumento21 pagineLectura 2 - EarthquakesLukas ZuñigaNessuna valutazione finora
- Column and Strut (Class Notes)Documento37 pagineColumn and Strut (Class Notes)Kinku Das100% (1)
- Mechanics of Materials: ColumnsDocumento24 pagineMechanics of Materials: ColumnsJulendra AriatedjaNessuna valutazione finora
- Introduction To Engineering GraphicsDocumento38 pagineIntroduction To Engineering GraphicsSurajMeshram100% (1)
- Field Exercise No. 4Documento3 pagineField Exercise No. 4Bambi InjangNessuna valutazione finora
- Theory of Structures 2 Course OutlineDocumento9 pagineTheory of Structures 2 Course OutlineJoshua John Julio100% (1)
- Lecture 2 - Steel SectionsDocumento45 pagineLecture 2 - Steel Sectionsayoub aliousalahNessuna valutazione finora
- AggregatesDocumento33 pagineAggregatespeacekeeper_05100% (1)
- STATICS OF RIGID BODIES Chapter IDocumento23 pagineSTATICS OF RIGID BODIES Chapter IViron LucerianoNessuna valutazione finora
- Dome StructuresDocumento8 pagineDome StructuresAdamu SuleimanNessuna valutazione finora
- Deflection of Beams - NoteDocumento12 pagineDeflection of Beams - NoteJackNessuna valutazione finora
- Trusses - Method of JointsDocumento5 pagineTrusses - Method of JointssetanglasNessuna valutazione finora
- Stability of StructuresDocumento12 pagineStability of StructuresPriyaNessuna valutazione finora
- Engineering Mechanics Vectors and ScalarsDocumento42 pagineEngineering Mechanics Vectors and ScalarssatwantNessuna valutazione finora
- Ultimate Strength Design of Reinforced Concrete ColumnsDocumento26 pagineUltimate Strength Design of Reinforced Concrete ColumnsJohn Cedric GarganeraNessuna valutazione finora
- RCD2Documento59 pagineRCD2Bobby AguilarNessuna valutazione finora
- One Way Solid SlabDocumento26 pagineOne Way Solid SlabalaajabbarNessuna valutazione finora
- Chapter # 7 - Design of One Way SlabsDocumento62 pagineChapter # 7 - Design of One Way SlabsPharo TotNessuna valutazione finora
- BDocumento9 pagineBPrincess Jorizalin Badulid PeñarandaNessuna valutazione finora
- Lecture IX (Riveted Joint - Eccentric Loading)Documento17 pagineLecture IX (Riveted Joint - Eccentric Loading)Dangol RupeshNessuna valutazione finora
- States of MatterDocumento10 pagineStates of MatterChristianJoseVillanosNessuna valutazione finora
- Structural TheoryDocumento2 pagineStructural TheoryMelvin EsguerraNessuna valutazione finora
- BeerVM11e PPT Ch11Documento92 pagineBeerVM11e PPT Ch11brayanNessuna valutazione finora
- Som PDFDocumento105 pagineSom PDFanon_10845568100% (1)
- CH 16Documento126 pagineCH 16Neerom Baldemoro100% (1)
- QUESTION PAPER CHECKLIST ModelDocumento6 pagineQUESTION PAPER CHECKLIST Modelsar_tpgitNessuna valutazione finora
- BARC Exam: Mechanical Engineering Paper IDocumento10 pagineBARC Exam: Mechanical Engineering Paper IDurga PrasadNessuna valutazione finora
- CH 13Documento15 pagineCH 13Brian LuisNessuna valutazione finora
- Column-Ppt SlidesDocumento23 pagineColumn-Ppt SlidesMary GraceNessuna valutazione finora
- Detailed Calculation For Box Girder DesignDocumento109 pagineDetailed Calculation For Box Girder Designleodegarioporral100% (8)
- Strength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresDa EverandStrength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresValutazione: 4 su 5 stelle4/5 (1)
- Interaction Analysis: Filter Storage TankDocumento2 pagineInteraction Analysis: Filter Storage TankTing KuanNessuna valutazione finora
- Technical MemorandumDocumento2 pagineTechnical MemorandumTing KuanNessuna valutazione finora
- Lunch Hour Outside The Campus For Female Students Per Week When N 20Documento4 pagineLunch Hour Outside The Campus For Female Students Per Week When N 20Ting KuanNessuna valutazione finora
- Three Pinned Arch: Theory of StructureDocumento37 pagineThree Pinned Arch: Theory of StructureTing KuanNessuna valutazione finora
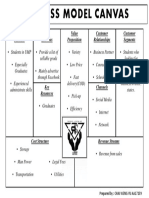
- Business Model Canvas: Key Partners Key Activities Value Proposition Customer Relationships Customer SegmentsDocumento1 paginaBusiness Model Canvas: Key Partners Key Activities Value Proposition Customer Relationships Customer SegmentsTing KuanNessuna valutazione finora
- Businiess Plan: Company LogoDocumento1 paginaBusiniess Plan: Company LogoTing KuanNessuna valutazione finora
- Calculus 1st Edition Briggs Solutions ManualDocumento26 pagineCalculus 1st Edition Briggs Solutions ManualJoseReevesdmpif100% (8)
- Module 1. FUNCTIONS: Learning ObjectivesDocumento6 pagineModule 1. FUNCTIONS: Learning ObjectivesTrixia100% (2)
- Patidar Nonstandard Finite Difference Methods PDFDocumento34 paginePatidar Nonstandard Finite Difference Methods PDFjjj_ddd_pierreNessuna valutazione finora
- Functional Analysisf15Documento100 pagineFunctional Analysisf15Tawseef AhmadNessuna valutazione finora
- Chapter 2 Force Vector Part1Documento22 pagineChapter 2 Force Vector Part1Fiq DenNessuna valutazione finora
- Out-Of-Plane Vibration of A Uniform Euler-Bernoulli Beam Attached To The Inside of A Rotating RimDocumento19 pagineOut-Of-Plane Vibration of A Uniform Euler-Bernoulli Beam Attached To The Inside of A Rotating RimFranco VillanuevaNessuna valutazione finora
- Formula SheetDocumento1 paginaFormula Sheetjannep60Nessuna valutazione finora
- DSP ExercisesDocumento91 pagineDSP ExercisesRoumen GuhaNessuna valutazione finora
- Lecture LuDocumento28 pagineLecture LusyahirahNessuna valutazione finora
- Module 3 Slides PDFDocumento65 pagineModule 3 Slides PDFyashar2500Nessuna valutazione finora
- Mathematicalanal033535mbp PDFDocumento571 pagineMathematicalanal033535mbp PDFManoj AmithaNessuna valutazione finora
- Course Template Phy305 QM I New FormatDocumento3 pagineCourse Template Phy305 QM I New FormatAnuprava BokshiNessuna valutazione finora
- GMQ1M2 Week 1Documento12 pagineGMQ1M2 Week 1Lerwin Garinga100% (1)
- Elementary and Middle School Mathematics: Teaching DevelopmentallyDocumento22 pagineElementary and Middle School Mathematics: Teaching Developmentallyyulyasiregar0% (3)
- 18MAT31 QB (Module 1 and 2)Documento13 pagine18MAT31 QB (Module 1 and 2)ZAID AHMED.RNessuna valutazione finora
- Or IDocumento23 pagineOr IIti BansalNessuna valutazione finora
- Ratio and Proportion, RaviDocumento85 pagineRatio and Proportion, RaviShrishailamalikarjunNessuna valutazione finora
- Problem 2.5: SolutionDocumento7 pagineProblem 2.5: SolutionDamirAljosevicNessuna valutazione finora
- DunnoDocumento1 paginaDunnoCasey J. MurphyNessuna valutazione finora
- 1996 - Adaptive Internal Model Control - Design and Stability AnalysisDocumento6 pagine1996 - Adaptive Internal Model Control - Design and Stability AnalysisademargcjuniorNessuna valutazione finora
- Math 432 - Real Analysis II: Solutions To Homework Due March 11Documento5 pagineMath 432 - Real Analysis II: Solutions To Homework Due March 11Jeison BenavidesNessuna valutazione finora
- R-Cheat SheetDocumento4 pagineR-Cheat SheetPrasad Marathe100% (1)
- MTH501 Quiz-1 by Attiq Kundi-UpdatedDocumento14 pagineMTH501 Quiz-1 by Attiq Kundi-UpdatedAbdurrehman M.IbrahimNessuna valutazione finora
- Anisotropic Materials Ansys PDFDocumento22 pagineAnisotropic Materials Ansys PDFCalgaryPureNessuna valutazione finora
- Solving Systems of Linear Equations Combining Like Terms Distributing TestDocumento3 pagineSolving Systems of Linear Equations Combining Like Terms Distributing Testsobre1982Nessuna valutazione finora
- LimitsDocumento10 pagineLimitseversonNessuna valutazione finora
- Statistic Report Saprolit OutlyrDocumento2 pagineStatistic Report Saprolit OutlyrtamzyaguanteNessuna valutazione finora
- R. Coppolino - The Integrated Test Analysis Process For Structural Dynamic SystemsDocumento166 pagineR. Coppolino - The Integrated Test Analysis Process For Structural Dynamic SystemsAlexander AndresenNessuna valutazione finora
- Gauss Elimination Method PDFDocumento23 pagineGauss Elimination Method PDFJoeren JarinNessuna valutazione finora
- MomentDocumento5 pagineMomentHashtag MeNessuna valutazione finora