Potrebbero piacerti anche
- Week 10-Feedback ControlDocumento34 pagineWeek 10-Feedback ControlMohd Aizad100% (1)
- 2 Automatic ControllersDocumento26 pagine2 Automatic ControllersCupa no DensetsuNessuna valutazione finora
- Control of Continuous Process: Lecturer: Dr. Shallon StubbsDocumento32 pagineControl of Continuous Process: Lecturer: Dr. Shallon StubbsLuther King Ferguson100% (1)
- Process Chapter 3Documento35 pagineProcess Chapter 3Estifanos FitsumNessuna valutazione finora
- ERT 321 Process Control & Dynamics: Feedback ControllersDocumento34 pagineERT 321 Process Control & Dynamics: Feedback Controllershakita86Nessuna valutazione finora
- ControllersDocumento32 pagineControllersEric KamauNessuna valutazione finora
- Week 12 - Control SystemDocumento30 pagineWeek 12 - Control SystemAzizan Anuar100% (1)
- PID ControllerDocumento22 paginePID ControllerannonymousNessuna valutazione finora
- Pid-Applied Control Systems (Proportional Plus Integral Plus Derivative Control)Documento28 paginePid-Applied Control Systems (Proportional Plus Integral Plus Derivative Control)hiltoneng100% (1)
- Karakteristik PengendaliDocumento34 pagineKarakteristik PengendaliM Ainun NajibNessuna valutazione finora
- 15.el Algoritmo de Control PIDDocumento44 pagine15.el Algoritmo de Control PIDYulieth BravoNessuna valutazione finora
- Chapter Two: Controller PrinciplesDocumento34 pagineChapter Two: Controller PrinciplesBekaluNessuna valutazione finora
- Control StrategyDocumento44 pagineControl StrategyAyunie FazlinNessuna valutazione finora
- Process Control - Chapter 7JUDocumento42 pagineProcess Control - Chapter 7JUY MuNessuna valutazione finora
- Chapter 4,5 ReDocumento36 pagineChapter 4,5 RePandimadevi GanesanNessuna valutazione finora
- P, I, D, PI, PD, and PID ControlDocumento14 pagineP, I, D, PI, PD, and PID ControlArnav KothiyalNessuna valutazione finora
- Week 9Documento21 pagineWeek 9candan.erkenNessuna valutazione finora
- Control Systems Overview Professor GopalankrishnaDocumento23 pagineControl Systems Overview Professor GopalankrishnaJameNessuna valutazione finora
- CPB 30004 - CHAPTER 1 - INTRO Sept 2014Documento52 pagineCPB 30004 - CHAPTER 1 - INTRO Sept 2014Ashwin MNessuna valutazione finora
- Pragna: Instruction and OperationDocumento19 paginePragna: Instruction and Operationapi-19787379Nessuna valutazione finora
- PIDDocumento32 paginePIDHani Hasan100% (1)
- Presentation 4 - January 2019Documento35 paginePresentation 4 - January 2019Muavha MadembeNessuna valutazione finora
- Week14pidmay242016pe3032 160530081519Documento57 pagineWeek14pidmay242016pe3032 160530081519AztvNessuna valutazione finora
- Pid Tuning MethodsDocumento16 paginePid Tuning MethodsNirmal sachanNessuna valutazione finora
- EE448 Lec3 ControlTechniques 2014Documento25 pagineEE448 Lec3 ControlTechniques 2014scotgunnerNessuna valutazione finora
- Exp - P6 - Temperature ControlDocumento10 pagineExp - P6 - Temperature ControlSiddesh PatilNessuna valutazione finora
- Unit 3Documento11 pagineUnit 3mayuraher9511Nessuna valutazione finora
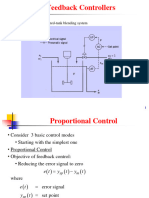
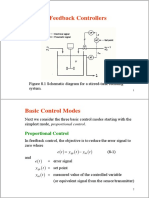
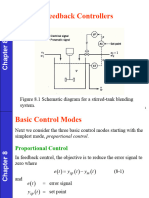
- Feedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemDocumento42 pagineFeedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemJoy RoyNessuna valutazione finora
- Task2 1 Specific Training-EnDocumento35 pagineTask2 1 Specific Training-EnSantiago LarrazNessuna valutazione finora
- Unit No. 06Documento28 pagineUnit No. 06Sainand JadhavNessuna valutazione finora
- CH 05 (Process Controllers)Documento35 pagineCH 05 (Process Controllers)32anikkumarpaulNessuna valutazione finora
- Controller PrincipleDocumento24 pagineController PrinciplePortia ShilengeNessuna valutazione finora
- Chapter1 2Documento32 pagineChapter1 2hailegebreselassie24Nessuna valutazione finora
- 5 - PID IAPC - MergedDocumento20 pagine5 - PID IAPC - MergedNikita ChaudhariNessuna valutazione finora
- PID ControllerDocumento4 paginePID Controlleralokranjan1811412Nessuna valutazione finora
- Pid Controller Tuning: S.no Name of The ChapterDocumento35 paginePid Controller Tuning: S.no Name of The ChapterAmit TripathiNessuna valutazione finora
- Feedback Controllers: Proportional ControlDocumento14 pagineFeedback Controllers: Proportional Control李承家Nessuna valutazione finora
- PID ControllerDocumento5 paginePID ControllerAbhilash MallikarjunaNessuna valutazione finora
- PidDocumento18 paginePidByron Xavier Lima CedilloNessuna valutazione finora
- PID ControllerDocumento27 paginePID Controllerprof.hovNessuna valutazione finora
- WK 14 Pe 3032 PID May 25,2015Documento22 pagineWK 14 Pe 3032 PID May 25,2015biruk1Nessuna valutazione finora
- Temperature Control: On-Off ControllerDocumento9 pagineTemperature Control: On-Off Controllerdivyansh kashyapNessuna valutazione finora
- Chapter 6 Basic Control TheoryDocumento94 pagineChapter 6 Basic Control Theoryislahid0% (1)
- Proportional Integral AND Derivative ControllerDocumento16 pagineProportional Integral AND Derivative ControllerAzhar AliNessuna valutazione finora
- Week 2Documento13 pagineWeek 2Abdinasir AliNessuna valutazione finora
- Pid EeeeDocumento28 paginePid Eeeecyprian obotaNessuna valutazione finora
- Classical PidcontrollerDocumento83 pagineClassical PidcontrollerEric KamauNessuna valutazione finora
- PracticalDocumento10 paginePracticalSec ArcNessuna valutazione finora
- Chapter 19 Programming The PID AlgorithmDocumento103 pagineChapter 19 Programming The PID AlgorithmMr KevinNessuna valutazione finora
- PID TIA Portal 5Documento110 paginePID TIA Portal 5Yogi KipiantoNessuna valutazione finora
- 5 PID ControlDocumento45 pagine5 PID ControlaldidwilaksitaNessuna valutazione finora
- Digital Pid Controller 175Documento6 pagineDigital Pid Controller 175andr14272Nessuna valutazione finora
- Chap19 SDocumento108 pagineChap19 SRaghad AlnajimNessuna valutazione finora
- L-14 (SS) (Iac) ( (Ee) Nptel)Documento10 pagineL-14 (SS) (Iac) ( (Ee) Nptel)Marvin BayanayNessuna valutazione finora
- Digital Pid Controller Using Microcontroller: Nishant Mishra 02913204914 EEEDocumento37 pagineDigital Pid Controller Using Microcontroller: Nishant Mishra 02913204914 EEENishant MishraNessuna valutazione finora
- Microelectronic Systems N2 Checkbook: The Checkbook SeriesDa EverandMicroelectronic Systems N2 Checkbook: The Checkbook SeriesNessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- Control of DC Motor Using Different Control StrategiesDa EverandControl of DC Motor Using Different Control StrategiesNessuna valutazione finora
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGDa EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGNessuna valutazione finora
- Chapter 3: Solid - Liquid Extraction / LeachingDocumento47 pagineChapter 3: Solid - Liquid Extraction / LeachingRaja Maizatulakmal100% (3)
- Final Role Play ScriptDocumento7 pagineFinal Role Play ScriptEreen100% (3)
- L7 (Individual)Documento53 pagineL7 (Individual)EreenNessuna valutazione finora
- Biorefine AssignmentDocumento10 pagineBiorefine AssignmentEreenNessuna valutazione finora
- 1.0 AbstractDocumento26 pagine1.0 AbstractEreenNessuna valutazione finora
- Simulation 1 ScriptsDocumento3 pagineSimulation 1 ScriptsEreenNessuna valutazione finora
- Simulation 2 ScriptDocumento3 pagineSimulation 2 ScriptEreenNessuna valutazione finora
- CPE614 Lesson Plan Mac 2019Documento5 pagineCPE614 Lesson Plan Mac 2019EreenNessuna valutazione finora
- MandarinDocumento9 pagineMandarinEreen100% (2)
- Assignment 1 Che522Documento14 pagineAssignment 1 Che522EreenNessuna valutazione finora
- Tutorial 2Documento2 pagineTutorial 2EreenNessuna valutazione finora
- Tutorial3 Q3Documento1 paginaTutorial3 Q3EreenNessuna valutazione finora
- 1.1 INTRO ProcessDocumento43 pagine1.1 INTRO ProcessEreenNessuna valutazione finora
- Tutorial 6Documento1 paginaTutorial 6EreenNessuna valutazione finora
- Blended Learning Eh2204bDocumento2 pagineBlended Learning Eh2204bEreenNessuna valutazione finora
- Matrix Project OrganizationDocumento13 pagineMatrix Project OrganizationEreenNessuna valutazione finora
- Tutorial 4Documento3 pagineTutorial 4EreenNessuna valutazione finora
- Tutorial 8Documento1 paginaTutorial 8EreenNessuna valutazione finora
- Lesson Plan CHE553 Sept2017Documento7 pagineLesson Plan CHE553 Sept2017EreenNessuna valutazione finora
- Lesson Plan Reaction Engineering 1Documento4 pagineLesson Plan Reaction Engineering 1EreenNessuna valutazione finora
- An Introduction To Vortex Ows - Theoretical Hydrodynamic Vortex BehaviourDocumento2 pagineAn Introduction To Vortex Ows - Theoretical Hydrodynamic Vortex BehaviourEreenNessuna valutazione finora
- Planning and Scheduling in Manufacturing and Services PDFDocumento7 paginePlanning and Scheduling in Manufacturing and Services PDFDang Hai Duong100% (1)
- IT6602-Software ArchitectureDocumento16 pagineIT6602-Software ArchitectureManesh Àmųl FrEaq0% (1)
- Intel Job Openings Feb 14, 2022Documento8 pagineIntel Job Openings Feb 14, 2022PRANAV KUMARNessuna valutazione finora
- Java Access ModifiersDocumento3 pagineJava Access ModifiersSavitha KamathNessuna valutazione finora
- Java 1Documento26 pagineJava 1Joel HubahibNessuna valutazione finora
- Dc09 083A. 276 KW (375 HP) : Us Tier 4I, Eu Stage IiibDocumento4 pagineDc09 083A. 276 KW (375 HP) : Us Tier 4I, Eu Stage IiibJulio Cxar Sullayme VargasNessuna valutazione finora
- Nathanayers ResumeDocumento2 pagineNathanayers Resumeapi-659422333Nessuna valutazione finora
- GFDGFDDocumento2 pagineGFDGFDNisal Nuwan SenarathnaNessuna valutazione finora
- Software Testing Life Cycle STLCDocumento5 pagineSoftware Testing Life Cycle STLCvenugopal0% (1)
- 05 Activity 1Documento2 pagine05 Activity 1Kimharry Locus IINessuna valutazione finora
- Case Study of Library Management SystemDocumento12 pagineCase Study of Library Management Systemridihima50% (2)
- Chapter 7 - Verilog Tasks and FunctionsDocumento25 pagineChapter 7 - Verilog Tasks and FunctionsPhạm Gia LongNessuna valutazione finora
- File 6 (Constractor in JAVA)Documento3 pagineFile 6 (Constractor in JAVA)Riduan AzizNessuna valutazione finora
- Quarkus For Spring Developers Red HatDocumento149 pagineQuarkus For Spring Developers Red HatArnav SahayNessuna valutazione finora
- ServomechanismDocumento4 pagineServomechanismJermaine StrachanNessuna valutazione finora
- Process Control, Instrumentation and Fuzzy Logic ProjectsDocumento22 pagineProcess Control, Instrumentation and Fuzzy Logic ProjectsR.ASHOKKUMAARNessuna valutazione finora
- UML and DP Lab ManualDocumento75 pagineUML and DP Lab ManualvenkateshNessuna valutazione finora
- Project-Plan - EN - 21Q4-Activity and Task-Level - V2Documento64 pagineProject-Plan - EN - 21Q4-Activity and Task-Level - V2manjrekarn100% (1)
- Fs Fortiguard Incident Response ServiceDocumento2 pagineFs Fortiguard Incident Response ServiceRafael Steven Soto del CampoNessuna valutazione finora
- 8 QeensDocumento9 pagine8 QeensInasNessuna valutazione finora
- Accra Technical University: Index NumberDocumento6 pagineAccra Technical University: Index NumberMoro Adams100% (1)
- History & Development of JavaDocumento15 pagineHistory & Development of JavaShrey NagpalNessuna valutazione finora
- Test Specification Data: Test Spec Number: Engine Serial Number: 67Z00776 Engine Model: Combustion: AspirationDocumento3 pagineTest Specification Data: Test Spec Number: Engine Serial Number: 67Z00776 Engine Model: Combustion: AspirationDhrubajyoti BoraNessuna valutazione finora
- Hooks Overview - Win32 Apps - Microsoft DocsDocumento8 pagineHooks Overview - Win32 Apps - Microsoft DocsAlan PetzoldNessuna valutazione finora
- Peserta Vaksin Tahap 1 Branch: Plumbon Periode: Juli 2021 Dept.: WH & Back OfficeDocumento36 paginePeserta Vaksin Tahap 1 Branch: Plumbon Periode: Juli 2021 Dept.: WH & Back OfficeIndah PurnamasariNessuna valutazione finora
- Andrei Shpakovskiy Android Dev (RB) ENg - B2 Sal 2200$ NetDocumento1 paginaAndrei Shpakovskiy Android Dev (RB) ENg - B2 Sal 2200$ NetsinevorezultatyNessuna valutazione finora
- Accident Detection and Alert SystemDocumento15 pagineAccident Detection and Alert SystemAnu33% (6)
- Planning LevelDocumento64 paginePlanning Leveloorja rungtaNessuna valutazione finora
- APLC DocumentationDocumento24 pagineAPLC DocumentationAnuja SharmaNessuna valutazione finora
- Commonly Asked OOP Interview Questions - Set 1Documento1 paginaCommonly Asked OOP Interview Questions - Set 1Krishanu ModakNessuna valutazione finora