Volume 3, Issue 10, October – 2018 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Heaviside Condition Applied to Lossy Transmission
Lines Terminated by RLC-Circuits
Vasil G. Angelov
Dept. of Mathematics,
University of Mining and Geology
1700 Sofia, Bulgaria
Abstract:- Here we consider lossy transmission lines II. DERIVATION OF THE BOUNDARY CONDITIONS
terminated by a circuit consisting of linear and FOR LOSSY TRANSMISSION LINE SYSTEM AND
nonlinear RCL-elements. Using the Kirchhoff’s laws we FORMULATION OF THE MIXED PROBLEM
derive boundary conditions and formulate the mixed
problem for hyperbolic system describing the lossy We proceed from the lossy transmission line system of
transmission line. Then we reduce the mixed problem to equations
an initial value problem on the boundary. To obtain a u ( x, t ) i ( x, t )
L Ri ( x, t ) 0,
distortionless propagation we change variables and x t
formulate a mixed problem for the hyperbolic system i ( x, t ) u ( x, t )
with respect to the new variables. The nonlinear C Gu ( x, t ) 0
x t
characteristics of the RLC-elements generate
nonlinearity in the equations of neutral type on the
Where L is per unit-length inductance, C – per unit-
boundary. Since we are not able to eliminate some
length capacitance, R – per unit-length resistance and G –
transitional currents and voltages we have to consider a
per unit-length conductance, is the length of the
system of 6 equations for 6 unknown functions. Under
Heaviside conditions we show that natural solutions are transmission line, v 1 / LC is the speed of propagation
distortionless ones. By means of fixed point technique we and T / (1/ LC ) LC is the time delay. This
prove existence-uniqueness of an oscillatory solution.
system is of hyperbolic type and we formulate the mixed
Keywords:- fixed point method, Heaviside condition, problem for (1): to find a solution
hyperbolic system, lossy transmission line, oscillatory u( x, t ), i( x, t ) For
solution, RLC-circui. ( x, t ) {( x, t ) R 2 : 0 x , t 0},
I. INTRODUCTION Satisfying the initial conditions
The main purpose of the present paper is to analyse a u( x,0) u0 ( x), i( x,0) i0 ( x) for x [0, ] .
lossy transmission line terminated by a particular circuit
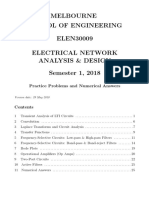
consisting of linear and nonlinear RCL-loads shown in Fig. where u0 ( x), i0 ( x) are prescribed functions. To derive
1. The case of lossless transmission line is considered in the the boundary conditions we proceed from Fig. 1. The main
recent paper [1] using the methods from [2]. Various difficulty is caused by the circuit configuration shown on
problems concerning transmission lines can be found in [3]- Fig. 1. Using the Kirchhoff’s laws we find relations between
[19]. Here we obtain conditions for existence-uniqueness of currents and voltages. The problem is to choose the
a generalized oscillatory solution. In Section 2 we formulate unknown functions and the number of equations in order to
a mixed problem for the lossy transmission line and derive obtain compatible system. We assume that R1 and L11 are
the boundary conditions using the Kirchhoff’s law. The
nonlinear characteristics of RLC- circuit generate nonlinear linear loads, that is, uR1 (t ) R1iR1 (t ),
boundary conditions. The main difficulty here is caused by
the fact that some additional currents and voltages cannot be
eliminated and we succeed to reduce the problem to 6
equations for 6 unknown functions. In Section 3 we
transform the hyperbolic transmission line system in a
diagonal form under the Heaviside condition and formulate
the initial and boundary conditions with respect to the new
variables. We show that oscillatory (not periodic) solutions
are specific for such problems. In Section 4 we give an
operator presentation of the oscillatory problem. In Section
5 we prove an existence-uniqueness theorem for the
oscillatory solution by fixed point method. In Section 6
using numerical example we demonstrate how to apply our
method to particular problems. Fig 1:- Lossy transmission line under Heaviside condition
terminated by RLC- circuit
IJISRT18OC325 www.ijisrt.com 695
Volume 3, Issue 10, October – 2018 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
dL11 (iL11 ) dL11 (iL01 ) diL11 (t ) diL11 (t ) E (t ) u(0, t ) R0i(0, t ) 0, t 0 .
u L11 (t ) L11 ,
dt diL11 dt dt
Therefore the boundary conditions are (3) and (4).
while C10 C10 (uC10 ) , C11(uC11 ) and L10 L10 (iL10 ) Now we are able to formulate the following mixed
problem for (1): to find a solution u( x, t ),i( x, t ) of (1) in ,
are nonlinear ones which means satisfying the initial conditions (2) and boundary conditions
(3), (4).
dC10 (u C10 ) du C10 (t )
iC10 (t ) , III. TRANSFORMATION OF THE HYPERBOLIC
du C10 dt SYSTEM IN A DIAGONAL FORM
dC11 (uC11 ) dC11 (uC11 ) duC11 (t )
iC11 (t ) , Let us write down (1) in a matrix form:
dt duC11 dt U ( x, t ) U ( x, t )
A A1U 0
dL10 (i L00 ) di L10 (t ) t x
u L10 (t ) .
di L10 dt u ( x, t ) u ( x, t )
u ( x, t ) U t U x
where U , , ,
We notice that u C11 (t ) u (, t ), i R1 (t ) i L10 (t ) and i ( x, t ) t i ( x, t ) x i ( x, t )
t x
iC10 (t ) i L11 (t ) . Proceeding as in [1], [2] the Kirchhoff’s
0 1/ C G / C 0
Current Law gives: A , A1
R / L
.
du C11 (t ) 1 / L 0 0
i L10 i C10 i C11 i (, t ) i L10 i C10 C11 i ( , t )
dt
To transform A into a diagonal form we form a matrix by its
du (, t )
i L10 i C10 C11 i (, t ) . eigen-vectors
dt
C L
Similarly, the Kirchhoff’s Voltage Law gives H (cf. [2]). Its inverse one is
uR1 uL10 uL11 u(, t ), C L
dL10 di L10 1 / 2 C 1 / 2 C
u R1 u L10 u C10 R1i L10 u C10 , H 1 and
di L10 dt 1 / 2 L 1 / 2 L
u L11 uC10 u( , t ) L11
diL11
uC10 u( , t ) . 1 / LC 0
dt HAH 1 A can .
0 1 / LC
Finding appropriate relationships between the
unknown functions we obtain the system V ( x, t )
du( , t ) New variables Z are introduced by the
C11 i( , t ) iL10 (t ) iC10 (t ) , I ( x, t )
dt
dL10 (iL10 ) diL10 (t )
C101
(iC10 (t )) R1iL10 (t ) , formulas Z HU, U H 1Z or
diL10 dt V ( x, t ) C u ( x, t ) L i ( x, t )
di L11 (t ) I ( x, t ) C u ( x, t ) L i ( x, t )
L11 u (, t ) C101 (i C10 (t )) ,
dt
u R1 u L10 u L11 u(, t ). and
u( x, t ) V ( x, t ) I ( x, t ) / 2 C
.
Having considered iC10 (t ) iL11 (t ) we obtain the i( x, t ) V ( x, t ) I ( x, t ) / 2 L .
right-hand side boundary conditions:
du( , t ) U U
C11 i( , t ) iL10 (t ) iC10 (t ) , Substituting U H 1Z in A A1U 0
dt t x
H 1Z H 1Z
dL10 (iL10 ) diL10 (t ) 1
C10 (iC10 (t )) R1iL10 (t ) ,
diL10 dt we obtain A A1 H 1Z 0 .
t x
(3) Then we multiply the matrix equation
diC10 (t ) 1 Z Z
L11 u( , t ) C10 (iC10 (t )) . H 1 AH 1 A1H 1Z 0 by H from the left:
dt t x
Similar reasoning leads to boundary conditions for the
left-hand side of the line:
IJISRT18OC325 www.ijisrt.com 696
Volume 3, Issue 10, October – 2018 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Z Z
HA1 H 1 Z 0 .
diC10 (t )
A can L11 e Rt / LW (, t ) e Rt / L J (, t ) / (2 C ) C101 (i C10 (t )).
t x dt
(5)
The Heaviside condition G / C R / L implies
1 G / C R / L G / C R / L R / L 0 Integrating (6) along the characteristics we have
HA1 H 1 W (0, t T ) W (, t ), J (0, t ) J (, t T ).
2 G / C R / L G / C R / L 0 R / L
. We assume that the unknown functions are
Then (5) becomes W (0, t ) W (t ), J (, t ) J (t ), iL10 (t ), iC10 (t ) and recalling
V ( x, t ) 1 V ( x, t ) R
V ( x, t ) 0 the denotation Z 0 L / C we have to solve the following
t LC x L
system consisting of differential equations with constant
I ( x, t ) 1 I ( x, t ) R delays:
I ( x, t ) 0 .
t LC x L
A new substitution
W (t ) 2 E (t ) L(0, t ) Z 0 R 0 J (t T ) / ( Z 0 R 0 ),
V ( x, t ) e Rt / LW ( x, t ) , I ( x, t ) e Rt / L J ( x, t ) dJ (t ) dW (t T ) R 1
W (t T )
leads to the system
dt dt L C11 Z 0
W ( x, t ) 1 W ( x, t ) R 1
t
x
0 J (t ) e
Rt / L 2 C
i L10 (t ) i C10 (t ) ,
LC L C11 Z 0 (6) C11
J ( x, t ) 1 J ( x, t ) di L10 (t ) C101 (i C10 (t )) R1i L10 (t )
0. , 10
t LC x dt dL10 (i L10 ) / di L10
di C10 (t ) W (t T ) J (t ) 1 1
Finally the transformation formulas are e Rt / L C10 (i C10 (t )).
dt 2 L11 C L11
W ( x, t ) e Rt / L C u ( x, t ) e Rt / L L i ( x, t )
J ( x, t ) e Rt / L C u ( x, t ) e Rt / L L i ( x, t ) So we have obtained a particular case of neutral
system of differential equations with retarded arguments.
and
u ( x, t ) e Rt / LW ( x, t ) e Rt / L J ( x, t ) / (2 C ) It is proved in [2] that the above initial value problem
. is (7)
equivalent to the mixed problem for the hyperbolic
i ( x, t ) e Rt / LW ( x, t ) e Rt / L J ( x, t ) / (2 L ) . transmission line system (6). The needed initial functions
we can obtain by transition of the initial functions along the
Now we are able to formulate a mixed problem in the characteristics of the hyperbolic system from [0, ] to
[0, T ] . This means that T becomes an initial point of the
new variables: to find a solution of (6) satisfying initial
initial interval [0, T ] . The exponential multiplayer in (10)
conditions
shows that we cannot look for periodic solutions. So we
W ( x,0) C u0 ( x ) L i0 ( x ) W0 ( x ), x [0, ] have to solve the following problem: to find an oscillatory
J ( x,0) C u0 ( x ) L i0 ( x ) J 0 ( x ), x [0, ] solution of (10) on [T , ) , where W0 (t ), J 0 (t ) are
prescribed initial oscillatory functions defined on [0, T ] .
and boundary conditions obtained after substituting in (3), We assume that the nonlinear characteristics are of the
(4) the voltage and current from (7): polynomial type:
m
dL10 (i) m d 2 L10 (i) m
L10 (i) l ni n , nl ni n1 , (n 1)nl ni n 2 .
E (t ) e Rt / LW (0, t ) e Rt / L J (0, t ) / (2 C ) n 1 di n 1 di 2 n2
R0 e Rt / LW (0, t ) e Rt / L J (0, t ) / 2 L 0, t 0
(8) То divide the expression dL10 (iL10 ) / diL10 we assume
C11 / 2 C e W (, t ) e Rt / L J (, t )
d Rt / L Assumptions (L): There is a constant i0 such that
m n 1
dt i L10 i 0 dL10 (i) / di L10 nl n i L10 Lˆ10 0.
e Rt / LW (, t ) e Rt / L J (, t ) / (2 L ) i L10 (t ) i C10 (t ). n 1
The nonlinear capacitance is C10 (u ) c0 / h 1 u /
where c 0 0, 0, h [2,3] are prescribed constants.
dL10 (iL10 ) diL10 (t ) 1 (cf. [10]).
C10 (iC10 (t )) R1iL10 (t ) , (9)
diL10 dt
IJISRT18OC325 www.ijisrt.com 697
Volume 3, Issue 10, October – 2018 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Assumptions (C): u 0 . Denote by CWA0 [0, ) the set of all continuous functions
coinciding with W0 (t ) J 0 (t ) on [0, T ] and vanishing at the
1 h
Since dC10 (u ) / du c 0 / h h 1 u / 0,
points of A A1 A2 . Consider the operators
C10 (u) :[ 0 , 0 ] c 0 / h 1 0 / , c 0 / h 1 0 / SW (W ) : CWA [0, ) CWA [0, ) and
then there exists S J ( J ) : CJA[0, ) CJA[0, )
c0 c0 acting by the formulas
C10 1 (u ) : , [0 , 0 ]
h 1 0 / h 1 0 / , W (t T ), t T
SW (W )( t ) and
C101 (.) 0 . W0 (t ), t [0, T ]
J (t T ), t T
dC10 (u ) S J ( J )( t ) .
The minimal value of
du
is J 0 (t ), t [0, T ]
Introduce the sets for the unknown functions
dC (u) dC ( ) c0
min 10 : u 0 10 0 Cˆ10 0
1 h
W (t ), J (t ), i L10 (t ), iC10 (t ):
du du h 1 u /
h
M W W (.) CWA [0, ) : W (t ) W0 e (t t k ) , t [t k , t k 1 ] ,
MJ J (.) C [0, ) : J (t ) J
A
J 0 e (t t k )
, t [t k , t k 1 ] ,
because
M L10 i (.) C[t , ) : i (t ) 0; e
L10 0 L10 k
Rt / L
i L10 (t ) J L1 e (t t k )
, t [t k , t k 1 ] ,
1 h c0 i (.) C[t , ) : i (t ) 0; e
2
d C10 (u )
1 (u / )
(1 h )/ h 1
1/ i C10 (t ) J C1 e (t t k ) , t [t k , t k 1 ]
Rt / L
M C10 C10 0 C10 k
du 2 h h
1 h c
2 02 1 (u / )
(1 2 h )/ h
0 , (k 0,1, 2,...) where W0 , J 0 , J L1 , J C1 , are positive
h
(1 h )/ h constants and T0 0 const 0.
dC10 (u ) c
0 1 0 M , Introduce the following families of pseudo-metrics
du h
1 2 h
k (W ,W ) max W (t ) W (t ) e ( t tk ) : t [tk , tk 1 ] ,
d C10 (u ) 1 h c 0 0
2
h
k ( J , J ) max J (t ) J (t ) e ( t tk ) : t [tk , tk 1 ] ,
2 1 H,
h 2
du 2
C101 (iC10 ) 1 (1 h )/ h
k (iL10 , iL10 ) max iL10 (t ) iL10 (t ) e (t tk ) : t [tk , tk 1 ] ,
h 0
iC10
Lˆ10 c 0 Lˆ10
1 . k (iC10 , iC10 ) max i C10 (t ) iC10 (t ) e
( t tk )
: t [tk , tk 1 ].
The set MW M J M L10 M C10 turns out into a
Operator presentation of the oscillatory problem complete uniform space with respect to the countable
saturated family of pseudo-metrics (cf. [1])
Let us put t0 T and W0 (t ), J 0 (t ) are prescribed initial
k (W , J , J L10 , J C10 ),(W , J , J L10 , J C10 )
oscillatory functions on the interval [0, T ] .
Let the set of zeros of the initial functions (W0( k )
max k (W ,W ), k ( J , J ), k ( J L10 , J L10 ), k ( J C10 , J C10 ) (k 0,1,2,...).
J 0 ( k ) 0) be 0 0 1 ... k k 1 ... n T .
Let S {tk } k 0 be a strictly increasing sequence of real
An operator
B ( BW , B J , B L10 , BC10 ) : M W M J M L10 M C10
numbers defined in the following way:
t0 T 0 , t1 T 1 , t2 T 2 , .... , tn T n T T 2T M W M J M L10 M C10
, is called contractive if
tn 1 T t1 , tn 2 T t2 , .... , t2n T tn 3T , …. k ( BW , B J , B L10 , BC10 ), ( BW , B J , B L10 , BC10 )
Obviously
1) lim tk ;
l 0 j ( k ) (W , J , J L10 , J C10 ), (W , J , J L10 , J C10 )
k
2) Let where l0 1 and j : A MW M J M L10 M C10 A .
A A1 A2 0 ,1 ,..., k , k 1 ,... , n t0 , t1,..., tk ,..., tn ,... . Here the index set is A 0,1,2,.... The map j is defined as
Then for every t k A2 there is t s such that follows: if t k T t s then
tk T ts A1 A2 , provided tk T 0 ;
s, if max s W ,W ~ ~
, k J , J ,
3) 0 min{t k 1 t k : k 0,1, 2,..., n}
j(k )
~
~
k iL10 , iL10 , k iC10 , iC10 s W ,W
~
max{t k 1 t k : k 0,1, 2,..., n} T0 .
~ ~
~ ~
k , if max s W ,W , k J , J , k iL10 , iL10 , k iC10 , iC10
~
~
~
k J , J k iL10 , i L10 k iC10 , i C10 .
Define the operator
IJISRT18OC325 www.ijisrt.com 698
Volume 3, Issue 10, October – 2018 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
BW BW (W , J , J L10 , J C10 ) , BJ (W , J , J L10 , J C10 ) , dW (t ) dW0 (t )
W (t ) W 0 (t ), , t [0, T ];
BL10 BL10 (W , J , J L10 , J C10 ) , dt dt
dJ (t ) dJ 0 (t )
BC10 BC10 (W , J , J L10 , J C10 ) J (t ) J 0 (t ), , t [0, T ];
dt dt
by the formulas
W0 (T ) 0, J 0 (T ) 0, iL10 (T ) 0, iC10 (T ) 0 .
2 E (t ) L Z 0 R 0
S ( J )(t ), t [t k , t k 1 ] Lemma 1. If (W , J , iL10 , iC10 ) MW M J M L10 M C10
BW( k ) (W , J )(t ): Z 0 R 0 Z 0 R 0 T
then
W0 (t ), t [0, T ]
BW (.), BJ (.), BiL (.), BiC (.) M W M J M L10 M C10 .
10 10
Proof: We first prove that functions defined by the
B J( k ) (W , J , i L10 , i C10 )(t ):
formulas (11) are continuous ones. Indeed, the continuity of
t I (W , J , i , i )( s)ds
t k
the first component is obvious. For the second one we have
L10 C10
B J( k ) (W , J )(t k 1 ) k 1 I k (W , J )( s)ds
t
t t k
t k 1 tk
t k 1 t k t k
I (W , J , i L10 , i C10 )( s)ds, t [t k , t k 1 ]
t k 1 t k tk 1
J 0 (t ), t [0, T ]
t k 1 t k tk I k (W , J )( s)ds 0 ,
B J( k ) (W , J )(t k 1 ) k 1 I k (W , J )( s)ds
t t
B L( k ) (i L10 , iC10 )(t ) : I L10 (i L10 , iC10 )( s )ds tk
10 tk
(11)
t tk t k 1 t k 1 t k 1 tk 2
t k 1 t k tk I L10 (i L10 , iC10 )( s )ds, t [t k , t k 1 ]
t k 1 t k tk 1 I k (W , J )( s)ds 0,
t
BC( k ) (W , J , iC10 )(t ) : I C10 (W , J , iC10 )( s )ds t t0 t0 t1
B J(0) (W , J )(t 0 ) 0 I k (W , J )( s)ds t0 I k (W , J )( s)ds 0,
t1 t 0
10 tk t0
t tk t k 1
t k 1 t k tk I C10 (W , J , iC10 )( s )ds, t [t k , t k 1 ] BJ(0) (W , J )(t 0 ) J 0 (t 0 ) 0 .
where For the another component we proceed in a similar way.
U k (W , J ) 2E (t ) L(0, t ) (Z 0 R0 )S T ( J )(t ) / ( Z 0 R0 ) Lemma 1 is thus proved.
Further on we call a generalized solution of the
dS T (W )(t ) R C oscillatory problem (10) the solution of the equations
I k (W , J , i L10 , iC10 )
dt
L C11 L
S T (W )(t )
W BW W , J , J BJ W , J , iL10 , iC10 ,
R C
iL10 BiL iL10 , iC10 , iC10 BiC W , J , iC10 ,
L C L
J (t ) e Rt / L
2 C
C11
i L10 (t ) i C10 (t ) ; 10
that is, the fixed point of the operator B. In this manner we
10
11
avoid the conformity condition [2].
1
C10 (iC10 (t )) R1iL10 (t )
I L10,k (iL10 , iC10 ) ;
dL10 (iL10 ) / diL10 I. Existence-uniqueness of an oscillatory solution
S T (W )(t ) J (t ) 1 1 Theorem 1. Let the conditions (U), (L), (C) be fulfilled and
I C10 , k (W , J , i C10 ) e Rt / L C10 (i C10 (t ))
2 L11 C L11 also the conditions:
W0 (t ) W0 e (t t k ) ; J 0 (t ) J 0 e (t t k ) , t [ k ; k 1 ]
We assume (k 0,1,2,...,n 1) ;
(IN): W0 (t ) W0e ( t k ) , J 0 (t ) J 0e (t k ) , t [0, T ] ;
W0 J 0 2 L Z 0 R0
e T0 0 ; W0 J 0 e T W0 ;
Assumptions (U): e T0 (W0 J 0 ) / 2 0 . 2 Z 0 R0 Z 0 R0
It follows W0 e T 2 (e T0 1) /
u (0, t ) W (t ) J (t T ) / 2 W0 e ( t t k )
J 0e (t T t k )
/ 2 R 2 C J L1 J C1
C
e T0
W 0 J 0e T
/ 2 ; 0
.
L C11 L
W 0 e T J 0
C11
J0;
u (, t ) W (t T ) J (t ) / 2 W0 e (t T tk ) J 0 e (t tk ) / 2 2
0 R1 J L1 e T0 1
J L1 ; KW
Z 0 R0 T
e 1;
e T0
W e
0
T
J 0 / 2 0 . Lˆ10 Z 0 R0
W e T J 0 0 e T0 1
2 0 J C1 ;
2L C L
Now we formulate the main problem: to find an 11 11
e T0 1 R 4 C
C T
oscillatory solution (W , J , iL10 , iC10 ) of the system (10)
K J e T 2 e 1 1
coinciding with prescribed oscillatory initial functions L C11 L C11
W0 (t ), J 0 (t ) on the interval [0, T ]
IJISRT18OC325 www.ijisrt.com 699
Volume 3, Issue 10, October – 2018 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
K L1 2
e T0 1
ˆ
L
2
R1 c0 h 1 0 / 1 ;
h 2
0 R1 J L1
Lˆ10
t
tk
e ( s t k ) ds tk
t k 1
e ( s t k ) ds
10
0 R1 J L1 e (t t k ) 1 e (t k 1 t k ) 1
T0
1 e T 1 2
KC1 2
e
c h 2 h
1 / 1.
L11 2 C Lˆ10
0 0
Then there exists a unique oscillatory solution of (10). e (t t k ) 2(e T0 1)( 0 R1 J L1 ) / ( Lˆ10 ) J L1 e (t t k ) ;
Proof: We show that B maps MW M J M L1 M C1
BC( k10) (W , J , iC10 )(t )
into itself. Indeed, for t [tk , tk 1 ] we have
t tk t k 1
t
2 E (t ) L Z 0 R0 I C10 (W , J , iC10 )( s)ds
t k 1 t k I C10 (W , J , i C10 )(s )ds
BW( k ) (W , J )(t )
tk tk
S T ( J )(t )
Z 0 R0 Z 0 R0
Rs / L W ( s T ) J ( s) 1 1
t
Z R0 e C10 (iC10 ( s)) ds
2 L tk
W0 e ( t t k ) 0 J 0 e T e ( t t k ) W 0 e ( t t k ) ; 2 L11 C L11
Z 0 R0 Z 0 R0
Rs / L W ( s T ) J ( s) 1 1
t k 1
B J( k ) (W , J , i L10 , i C10 )(t )
e
L
C10 (iC10 ( s)) ds
tk
2 L11 C 11
t t tk t k 1
tk
I (W , J , i L10 , i C10 )( s )ds
t k 1 t k tk
I (W , J , i L10 , i C10 )( s )ds W e T
J 0 0 e (t t k )
1 e ( t k 1 t k )
1
0
2L C L11
dW ( s T )
2 C
11
t
t
ds e Rs / L i L10 ( s ) i C10 ( s ) ds
tk ds C11 tk
e T0 1 W0 e T J 0
e (t t k ) 2 0 e (t t k ) J C1 .
R t L11
J ( s )ds
C 2 C
t W ( s T )ds
t
L C L
k It remains to show that the operator B is a contractive
tk
11
t k 1 dW ( s T ) 2 C J L1 J C1 t k 1
one. Indeed
tk ds
ds
C11 tk
e ( s t k ) ds BW( k ) (W , J )(t ) BW( k ) (W , J )(t )
R t k 1 Z 0 R 0 J (t T ) J (t T ) / ( Z 0 R 0 )
J ( s )ds
C t k 1
L C L t W ( s T )ds
11 k
tk e ( t t k ) e T Z 0 R 0 k T ( J , J ) / ( Z 0 R 0 )
W (t T )
2 C J L1 J C1 e ( t t k ) 1 e ( t k 1 t k ) 1
which implies
k ( BW( k ) (W , J ), BW( k ) (W , J ))
C11
e T Z 0 R0 k T ( J , J ) / ( Z 0 R0 ) K W k T ( J , J ).
R e (t t k ) 1 e (t k 1 t k ) 1 It follows
W0 e J 0
C T
~ ~ ~ ~~ ~
k BW( k ) (W , J ), BW( k ) (W , J ) KW j ( k ) (W , J , iL10 , iC10 ), (W , J , iL10 , iC10 )
L C L
11
e ( t t k ) 1 R C 2 C J L1 J C1 Further on we have
e (t t k )W0 e T W0 e J 0
T
~ ~~ ~
L C11 L C11 BJ( k ) (W , J , iL10 , iC10 )( t ) BJ( k ) (W , J , iL10 , iC10 )( t )
dW ( s T ) dW ( s T )
e T0 1 R
t
2 C J L1 J C1 ds
W0 e J 0
C
e (t t k )
T tk
ds ds
L C11 L C11
R
C
k T W , W e t e
t
T ( s t k )
ds
L C L
k
11
e T0 1 R 2 C J L1 J C1
W0 e J 0
C R
e (t t k ) W0 e T 2
T
C
k J , J t e
t
( s t k )
L C11 L ds
C11
L C L
11 k
(t t k )
J 0e
i
; 2 C
t
k L10 , i L10 k i C10 , i C10 e ( s t k ) ds
C11 tk
B L(10
k)
(i L10 , iC10 )(t ) R t k 1 ( s t k )
t tk t k 1
L C L
C
t e
ds k T W ,W e T k J , J
t
I L10 (i L10 , iC10 )(s)ds
k
I L10 (i L10 , i C10 )(s )ds 11
tk t k 1 t k tk
1
C (iC10 (s)) R1i L10 (s) t k 1 C101 (iC10 ( s)) R1i L10 ( s)
t
ds
10
ds
tk dL10 (i L10 ) / di L10 tk dL10 (i L10 ) / di L10
IJISRT18OC325 www.ijisrt.com 700
Volume 3, Issue 10, October – 2018 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
(1/ C11 ) 2 C k i L10 , i L10 k i C10 , i C10 where
t k 1
e ( s t k ) ds
K L1 2e T0 2 / Lˆ10 R1 c 0h 2
1 0 / .
tk 2
h
W (t T ) W (t T )
It follows
R C e (t t k ) 1
L C L k T
W , W e T k J , J
k B L(10
k)
(i L10 , iC10 ), B L(10
k)
(i L10 , iC10 )
11
K L1 k (W , J , i L10 , iC10 ), (W , J , i L10 , iC10 ) .
(1/ C11 ) 2 C k i L10 , i L10 k i C10 , i C10
e (t t k )
1 /
Finally
BC( k10) (W , J , i C10 )(t ) BC( k10) (W , J , i C10 )(t )
R ( t k 1 t k )
1
L C L
C
T
k T W , W e k J , J e
I C10 (W , J , i C10 )( s ) I C10 (W , J , i C10 )( s ) ds
t
11 tk
2 C / C11 i k L10
, i L10 k i C10 , i C10 e ( t k 1 t k )
1 /
t tk
t k 1 t k I
t k 1
tk C10 (W , J , i C10 )( s ) I C10 (W , J , i C10 )( s ) ds
e ( t t k ) k T W , W e T 1 1
W (s T ) W (s T ) J (s) J (s) C10 (iC10 (s)) C10 (iC10 (s))
e Rs / L
t
ds
R e T0 1
C
L11
tk
T 2L11 C
L C L k T W , W e k J , J 2
11
R s W ( s T ) W ( s T ) J ( s) J ( s) C101 (iC10 ( s)) C101 (iC10 ( s))
2 C / C11 10 10 10 10
k i L , i L k i C , i C 2 e T0 1 /
t k 1
tk
e L
L11
ds
2 L11 C
e ( t t k ) k T W , W e T
2
R 1 e T0 1
T
k T W , W e k J , J k (iC10 , iC10 )c 0h 2 h 1 0 /
L C11 Z 0
T
k T W , W e k J , J 2
2 L11 C
L11
2 C / C11 k i L10 , i L10 k i C10 , i C10 2 e T0 1 /
e 1 R
T0
1 T 4 C
. e
tk
t
( s t k )
ds
t k 1
tk
e ( s t k ) ds
e ( t t k ) e T 2 e 1
C11
L C11 Z 0
e (t t k ) max k T W ,W , k J , J , k iC10 , iC10
. max k T W , W , k J , J , k i L10 , i L10 , k i C10 , i C10 . T c 0h 2 h 1 0 /
2
It follows
. 2 e T0 1 /
e
1
L11
2 L11 C
k B J( k ) (W , J ), B J( k ) (W , J )
K J j ( k ) (W , J , i L10 , i C10 ), (W , J , i L10 , i C10 )
,
~ ~~ ~
e ( t tk ) K C1 j ( k ) (W , J , iL10 , iC10 ), (W , J , iL10 , iC10 ) ,
where
where
KJ e T
2e T0 2 R
1
T
e 1
4 C
. K C1 2
e T0 1 e T 1
L11 2 C
2
c0h 2 h 1 0 / .
L C11Z 0 C11
It follows
In a similar way we obtain
B L10 (i L10 , i C10 )(t ) B L(10
(k ) k)
(i L10 , i C10 )(t ) k BC( k10) (W , J , iC10 ), BC( k10) (W , J , i C10 )
t
I L10 (i L10 , i C10 )( s ) I L10 (i L10 , i C10 )( s ) ds
K C1 k (W , J , i L10 , i C10 ), (W , J , i L10 , i C10 ) .
tk
Therefore
t tk
I k B(W , J , i L10 , i C10 ), B(W , J , i L10 , i C10 )
t k 1
(i L10 , i C1 )( s ) I L10 (i L10 , i C10 )( s ) ds
t k 1 t k tk L10
t C101 (i C10 ( s )) R1i L10 ( s ) C101 (i C10 ( s )) R1i L10 ( s )
K k (W , J , i L10 , i C10 ), (W , J , i L10 , i C10 )
t
tk dL10 (i L10 ) / di L10
dL10 (i L10 ) / di L10
ds
where K max KW , K J , K L1 , KC1 1 . In view of fixed
point theorem from [2] and a remark in [18], the operator B
t k 1 C101 (i C10 ( s )) R1i L10 ( s ) C101 (i C10 ( s )) R1i L10 ( s )
tk
dL10 (i L10 ) / di L10
dL10 (i L10 ) / di L10
ds
has a unique fixed point which is an oscillatory solution of
(10).
Theorem 1 is thus proved.
k (W , J , i L10 , i C10 ), (W , J , i L10 , i C10 ) e (t t k )
. 2e T0 2 / Lˆ10 R1 c 0h 2
2
h 1 0 /
~ ~~ ~
e ( t tk ) K L1 k (W , J , i L10 , iC10 ), (W , J , iL10 , iC10 ) ,
IJISRT18OC325 www.ijisrt.com 701
Volume 3, Issue 10, October – 2018 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
IV. NUMERICAL EXAMPLE REFERENCES
Here we collect all inequalities guaranteeing an [1]. Angelov, and M. Hristov, “Lossless transmission lines
existence-uniqueness result. terminated by linear and nonlinear RLC-loads,”
For a transmission line with length 10m, International Journal on Recent and InnovationTrends
L 0,45 H m, C 80 pF m , R 0,0875 we have in Computing and Communications, vol. 5, pp. 1341-
1352, No.6, 2017.
Z 0 L / C 0,45.106 / 80.1012 47,5 ; [2]. V.G. Angelov, A Method for Analysis of
LC 6.10 9 ; T LC 6.108 sec ; Transmission Lines Terminated by Nonlinear Loads.
Nova Science, New York, 2014.
R / L 0,0875 / 0,45 .10 6 1,94 .10 5 . Choose 1012 and [3]. L. De Broglie, Problemes de Propagations Guidees des
T0 1014 , then T0 0 0,01 and ondes Electromagnetiques. Gauthier-Villars, Paris,
9
1941.
T 10 .6.10 6.10 6000 . We have also
12 3
[4]. C.A. Holt, Introduction to Electromagnetic Fields and
C10 (u ) c0 / 1 u / c0 / 1 u / , where h 2; Waves, J. Wiley & Sons, New York, 1963.
[5]. E.C. Jordan and K.G. Balmain, Electromagnetic
11
R0 R1 35,5 ; c0 5.10 F and 0,52 V Waves and Radiating Systems, Prentice-Hall Inc.,
12
0 0,51 0,52 ; C11 50.10 F; L11 3.106 H . 1968.
[6]. S. Ramo, J.R. Whinnery, and T. Duzer, Fields and
We choose L10 (i) 3i 1 / 12i 3 . Then Waves in Communication Electronics. J.Wiley &
Sons, Inc., New York, 1994.
dL10 (iL10 ) / diL10 3 0,25iL10 2 . [7]. L.О. Chua, C.A. Desoer, and E.S. Kuh, Linear and
For i0 1 we obtain 3 0,25iL10 2 3 0,25 2,75 and Nonlinear Circuits. McGraw-Hill Book Company,
New York, USA, 1987.
3
[8]. L.О. Chua, and Pen-Min Lin, Machine Analysis of
(n 1)nl
n 2
then n i0 0,5 ; Lˆ10 2,75. If we choose Electronic Circuits. Energy, Moscow, 1980.
n 2 [9]. S. Rosenstark, Transmission Lines in Computer
h2 and W0 J 0 J L1 J C1 0 , e T e 6000 0 , Engineering. Mc Grow-Hill, New York, 1994.
[10]. S.A. Maas, Nonlinear Microwave and RF Circuits.
then the above inequalities become
2nd ed., Artech House, Inc., Boston London, 2003.
1 2 0,45 .10 6 [11]. D.K. Misra, Radio-Frequency and Microwave
e0,01 0,51 0,505 0,51 ; 1 ;
2 83 Communication Circuits. Analysis and Design, 2nd
ed., University of Wisconsin-Milwaukee, J. Wiley &
e 0,01 1 1 4 80 .10 12
2 1,94 .10 5
1; Sons, Inc., 2004.
1012 50 .10 12.47,5 50 .10 12 [12]. G. Miano, and A. Maffucci, Transmission Lines and
Lumped Circuits, 2nd ed., Academic Press, New
1 35,5 e 0,01
1 1 e 0,01
1 York, 2010.
2 1 ; 2 1 12 1;
2,75 10 12 6 [13]. F. Martín, Artificial Transmission Lines for RF and
10 .3.10
12
2 80 .10 Microwave Applications. Wiley Series in Microwave
12
KW e 6000 0 1 ; & Optical Engineering, 2015.
83 [14]. R. Singh, Circuit Theory and Transmission Lines.
e 0,01 1 4 80 .10 12
McGraw Hill Education, 2013.
1
KJ 2 1,94 .10 5
1 [15]. Makwana, and B. Bhalja, Transmission Line
1012 50 .10 12.47,5 50 .10 12 Protection Using Digital Technology (Energy Systems
; in Electrical Engineering), Springer, 2016.
[16]. Dr.S. Ruikar, Electromagnetics and Transmission
e 0,01 1
K L1 2 12 35,5 0,52 1 0,98 1 ; Lines. Nirali Prakashan, 2016.
10 .2,75 [17]. R.A. Lundquist, Transmission Line Construction:
Methods and Costs. Forgotten Books, 2015.
e 0,01 1
0,52 1 0,98 .
1
K C1 2 12
6 6
[18]. S. Kalaga, and P. Yenumula, Design of Electrical
10 .3.10 2.10 80 Transmission Lines: Structures and Foundations. CRC
Press, 2016.
V. CONCLUSION. [19]. L. Georgiev, “Some extension of Angelov’s fixed
point theorem,” unpublished.
The solution can be approximated by an iterative
sequence of successive approximations.
IJISRT18OC325 www.ijisrt.com 702
Potrebbero piacerti anche
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Da EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Nessuna valutazione finora
- AlexanderCh16final R1Documento19 pagineAlexanderCh16final R1utpNessuna valutazione finora
- Modeling and Simulation of A Series Resonant InverterDocumento6 pagineModeling and Simulation of A Series Resonant InverterkaaisNessuna valutazione finora
- Tutorial 5: XT EutDocumento2 pagineTutorial 5: XT EutNornis DalinaNessuna valutazione finora
- Chaos Some 1-D Discontinuous Maps That Appear The Electrical CircuitsDocumento10 pagineChaos Some 1-D Discontinuous Maps That Appear The Electrical CircuitsO Doutor FantasticNessuna valutazione finora
- Linear System Theory: Dr. Vali UddinDocumento49 pagineLinear System Theory: Dr. Vali UddinMuhammad HassanNessuna valutazione finora
- ECE 303 Notes FinalDocumento209 pagineECE 303 Notes FinalpcjabberNessuna valutazione finora
- Modelling The Dynamics of Log-Domain Circuits (A.Ascoli At-El 2007)Documento38 pagineModelling The Dynamics of Log-Domain Circuits (A.Ascoli At-El 2007)yanivscribdNessuna valutazione finora
- Electric Circuit TheoryDocumento28 pagineElectric Circuit TheoryAashish PantNessuna valutazione finora
- Transmission Line Write UpDocumento10 pagineTransmission Line Write UpAbhishek AgrawalNessuna valutazione finora
- Boundary Value ProblemsDocumento15 pagineBoundary Value ProblemsShadman Saqlain Rahman, 170021057Nessuna valutazione finora
- Teorema PrigogineDocumento8 pagineTeorema PrigogineGijacis KhasengNessuna valutazione finora
- Signals and Systems Model QPDocumento6 pagineSignals and Systems Model QPJeeva JeeNessuna valutazione finora
- Pulse Propagation Along Close Conductors: Numerical Solution of The Telegraph Equations Using MathematicaDocumento60 paginePulse Propagation Along Close Conductors: Numerical Solution of The Telegraph Equations Using MathematicasyedshahabudeenNessuna valutazione finora
- Time Domain Response of Second Order Linear CircuitsDocumento15 pagineTime Domain Response of Second Order Linear CircuitsMOHSINALI MOMINNessuna valutazione finora
- Lecture 3Documento11 pagineLecture 3Syed Hussain Akbar MosviNessuna valutazione finora
- Iii ( H-Cain Smai.I.-Signal. Modks of I-He: I Rekz-I I.E I'Woh' Iaser. Ii. 13Wxr 01:) :L.M - RRM L3Erm WRF:MDocumento5 pagineIii ( H-Cain Smai.I.-Signal. Modks of I-He: I Rekz-I I.E I'Woh' Iaser. Ii. 13Wxr 01:) :L.M - RRM L3Erm WRF:MMahmoud BakrNessuna valutazione finora
- Notes Lecture 8Documento23 pagineNotes Lecture 8nelsongil211Nessuna valutazione finora
- Lab 03:to Investigate The Control of Various Mechanical and Electrical System Using Matlab®Documento8 pagineLab 03:to Investigate The Control of Various Mechanical and Electrical System Using Matlab®Syed Saqib BukhariNessuna valutazione finora
- Analysis of Steady-States of Continuous-Time Impulse K-Winners-Take-All Neural NetworkDocumento7 pagineAnalysis of Steady-States of Continuous-Time Impulse K-Winners-Take-All Neural NetworkPavloNessuna valutazione finora
- ENAD Problem BookletDocumento37 pagineENAD Problem BookletPruthvi NinganurNessuna valutazione finora
- Circuit EquitionDocumento52 pagineCircuit EquitionDhany SSatNessuna valutazione finora
- Exam RT2 2015 SummerDocumento7 pagineExam RT2 2015 SummerLuis CarvalhoNessuna valutazione finora
- Discrete-Time Modeling and Analysis of Pulse-Width-Modulated Switched Power ConvertersDocumento12 pagineDiscrete-Time Modeling and Analysis of Pulse-Width-Modulated Switched Power ConvertersRo HenNessuna valutazione finora
- 1 - Conservation Laws of Fluid Motion and Boundary ConditionsDocumento34 pagine1 - Conservation Laws of Fluid Motion and Boundary ConditionsAbaziz Mousa OutlawZzNessuna valutazione finora
- Fimfeififviifv FJFNFNFNFJFNFDocumento18 pagineFimfeififviifv FJFNFNFNFJFNFHari NirmalNessuna valutazione finora
- State Space For Electric CircuitDocumento16 pagineState Space For Electric CircuitThafer MajeedNessuna valutazione finora
- Dynamics in Neural Mass Model NetworksDocumento4 pagineDynamics in Neural Mass Model NetworksGuillermo Prol CasteloNessuna valutazione finora
- On The Global Existence For The Muskat Problem: DOI 10.4171/JEMS/360Documento27 pagineOn The Global Existence For The Muskat Problem: DOI 10.4171/JEMS/360Alvaro MejiaNessuna valutazione finora
- Grinfeldstrang-Eigenvalues On PolygonsDocumento15 pagineGrinfeldstrang-Eigenvalues On Polygonslogsdad291Nessuna valutazione finora
- Modes in Linear CircuitsDocumento13 pagineModes in Linear CircuitsmtichyNessuna valutazione finora
- The Ten Martini ProblemDocumento42 pagineThe Ten Martini ProblemΧάρης ΦραντζικινάκηςNessuna valutazione finora
- Asymptotic Properties of Coupled Nonlinear Langevin Equations in The Limit of Weak Noise. II: Transition To A Limit CycleDocumento11 pagineAsymptotic Properties of Coupled Nonlinear Langevin Equations in The Limit of Weak Noise. II: Transition To A Limit CyclehappelNessuna valutazione finora
- Transfer Function Modeling For The Buck Converter: Sanda Lefteriu Cécile LabarreDocumento4 pagineTransfer Function Modeling For The Buck Converter: Sanda Lefteriu Cécile Labarre1balamanianNessuna valutazione finora
- 79497-Article Text-186771-1-10-20120724Documento7 pagine79497-Article Text-186771-1-10-20120724AderajewNessuna valutazione finora
- DC Transient AnalysisDocumento206 pagineDC Transient Analysisasanithanair35Nessuna valutazione finora
- Report On Magnetic Levitation System ModellingDocumento6 pagineReport On Magnetic Levitation System ModellingSteve Goke AyeniNessuna valutazione finora
- Art I Go CN Mac 2024 Armando VelasquezDocumento7 pagineArt I Go CN Mac 2024 Armando VelasquezMaria Luisa Velasquez VelasquezNessuna valutazione finora
- G RC/RL Step-by-Step Procedure: TH Eq Eq THDocumento2 pagineG RC/RL Step-by-Step Procedure: TH Eq Eq THDileep GNessuna valutazione finora
- Melbourne School of Engineering ELEN30009 Electrical Network Analysis & Design Semester 1, 2017Documento34 pagineMelbourne School of Engineering ELEN30009 Electrical Network Analysis & Design Semester 1, 2017RogerNessuna valutazione finora
- Multiple-Input Multiple-Output Wireless CommunicationsDocumento16 pagineMultiple-Input Multiple-Output Wireless CommunicationsSwetha TiruvaipatiNessuna valutazione finora
- Electromagnetic WaveDocumento33 pagineElectromagnetic WaveDurriyah AmiiNessuna valutazione finora
- Ab FLM Revisedv3Documento26 pagineAb FLM Revisedv3grinderfox7281Nessuna valutazione finora
- Interest Rates and FX ModelsDocumento12 pagineInterest Rates and FX ModelsbobmezzNessuna valutazione finora
- Free OscillationsDocumento8 pagineFree OscillationsAnonymous 70j56EwNessuna valutazione finora
- Solution of Excited Non-Linear Oscillators Under Damping Effects Using The Modified Differential Transform MethodDocumento12 pagineSolution of Excited Non-Linear Oscillators Under Damping Effects Using The Modified Differential Transform MethodCaio CabralNessuna valutazione finora
- Chapter 3 Part IDocumento68 pagineChapter 3 Part IDaniel MengeshaNessuna valutazione finora
- Introduction To Computational Fluid Dynamics: Finite Differences Method - )Documento17 pagineIntroduction To Computational Fluid Dynamics: Finite Differences Method - )Petru MorarNessuna valutazione finora
- Capacitive Flux Compression GeneratorDocumento6 pagineCapacitive Flux Compression GeneratorΑΝΔΡΕΑΣ ΤΣΑΓΚΟΣNessuna valutazione finora
- The Laplace TransformsDocumento61 pagineThe Laplace TransformsLouie Shaolin Lungao100% (1)
- Advanced Quantum Mechanics, Fall 2017 Assignment 2 (Path Integrals in Quantum Mechanics)Documento3 pagineAdvanced Quantum Mechanics, Fall 2017 Assignment 2 (Path Integrals in Quantum Mechanics)Anonymous tjckgoWNeNessuna valutazione finora
- Lecture10 VibrationDocumento28 pagineLecture10 VibrationAbcNessuna valutazione finora
- Homework 5: Note 3BDocumento10 pagineHomework 5: Note 3Brusty100% (1)
- E14ADocumento12 pagineE14AManoj GuptaNessuna valutazione finora
- Keady, COLEBROOK-WHITE FORMULA FOR PIPE FLOWSDocumento6 pagineKeady, COLEBROOK-WHITE FORMULA FOR PIPE FLOWSDang HongNessuna valutazione finora
- Robust Finite-Time Extended Dissipative Control For A Class of Uncertain Switched Delay SystemsDocumento10 pagineRobust Finite-Time Extended Dissipative Control For A Class of Uncertain Switched Delay SystemsBharathNessuna valutazione finora
- Lecture 9 and 10Documento13 pagineLecture 9 and 10Hyder GamingNessuna valutazione finora
- Trans LinesDocumento8 pagineTrans LinesariehashimieNessuna valutazione finora
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Da EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Nessuna valutazione finora
- Impact of Stress and Emotional Reactions due to the Covid-19 Pandemic in IndiaDocumento6 pagineImpact of Stress and Emotional Reactions due to the Covid-19 Pandemic in IndiaInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- An Overview of Lung CancerDocumento6 pagineAn Overview of Lung CancerInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Entrepreneurial Creative Thinking and Venture Performance: Reviewing the Influence of Psychomotor Education on the Profitability of Small and Medium Scale Firms in Port Harcourt MetropolisDocumento10 pagineEntrepreneurial Creative Thinking and Venture Performance: Reviewing the Influence of Psychomotor Education on the Profitability of Small and Medium Scale Firms in Port Harcourt MetropolisInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Ambulance Booking SystemDocumento7 pagineAmbulance Booking SystemInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Designing Cost-Effective SMS based Irrigation System using GSM ModuleDocumento8 pagineDesigning Cost-Effective SMS based Irrigation System using GSM ModuleInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Detection and Counting of Fake Currency & Genuine Currency Using Image ProcessingDocumento6 pagineDetection and Counting of Fake Currency & Genuine Currency Using Image ProcessingInternational Journal of Innovative Science and Research Technology100% (9)
- Utilization of Waste Heat Emitted by the KilnDocumento2 pagineUtilization of Waste Heat Emitted by the KilnInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Forensic Advantages and Disadvantages of Raman Spectroscopy Methods in Various Banknotes Analysis and The Observed Discordant ResultsDocumento12 pagineForensic Advantages and Disadvantages of Raman Spectroscopy Methods in Various Banknotes Analysis and The Observed Discordant ResultsInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Digital Finance-Fintech and it’s Impact on Financial Inclusion in IndiaDocumento10 pagineDigital Finance-Fintech and it’s Impact on Financial Inclusion in IndiaInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Computer Vision Gestures Recognition System Using Centralized Cloud ServerDocumento9 pagineComputer Vision Gestures Recognition System Using Centralized Cloud ServerInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Study Assessing Viability of Installing 20kw Solar Power For The Electrical & Electronic Engineering Department Rufus Giwa Polytechnic OwoDocumento6 pagineStudy Assessing Viability of Installing 20kw Solar Power For The Electrical & Electronic Engineering Department Rufus Giwa Polytechnic OwoInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Predictive Analytics for Motorcycle Theft Detection and RecoveryDocumento5 paginePredictive Analytics for Motorcycle Theft Detection and RecoveryInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Auto Tix: Automated Bus Ticket SolutionDocumento5 pagineAuto Tix: Automated Bus Ticket SolutionInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Effect of Solid Waste Management on Socio-Economic Development of Urban Area: A Case of Kicukiro DistrictDocumento13 pagineEffect of Solid Waste Management on Socio-Economic Development of Urban Area: A Case of Kicukiro DistrictInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Smart Health Care SystemDocumento8 pagineSmart Health Care SystemInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Blockchain Based Decentralized ApplicationDocumento7 pagineBlockchain Based Decentralized ApplicationInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Factors Influencing The Use of Improved Maize Seed and Participation in The Seed Demonstration Program by Smallholder Farmers in Kwali Area Council Abuja, NigeriaDocumento6 pagineFactors Influencing The Use of Improved Maize Seed and Participation in The Seed Demonstration Program by Smallholder Farmers in Kwali Area Council Abuja, NigeriaInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Cyber Security Awareness and Educational Outcomes of Grade 4 LearnersDocumento33 pagineCyber Security Awareness and Educational Outcomes of Grade 4 LearnersInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Visual Water: An Integration of App and Web To Understand Chemical ElementsDocumento5 pagineVisual Water: An Integration of App and Web To Understand Chemical ElementsInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Unmasking Phishing Threats Through Cutting-Edge Machine LearningDocumento8 pagineUnmasking Phishing Threats Through Cutting-Edge Machine LearningInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Compact and Wearable Ventilator System For Enhanced Patient CareDocumento4 pagineCompact and Wearable Ventilator System For Enhanced Patient CareInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- An Industry That Capitalizes Off of Women's Insecurities?Documento8 pagineAn Industry That Capitalizes Off of Women's Insecurities?International Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Implications of Adnexal Invasions in Primary Extramammary Paget's Disease: A Systematic ReviewDocumento6 pagineImplications of Adnexal Invasions in Primary Extramammary Paget's Disease: A Systematic ReviewInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Smart Cities: Boosting Economic Growth Through Innovation and EfficiencyDocumento19 pagineSmart Cities: Boosting Economic Growth Through Innovation and EfficiencyInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Insights Into Nipah Virus: A Review of Epidemiology, Pathogenesis, and Therapeutic AdvancesDocumento8 pagineInsights Into Nipah Virus: A Review of Epidemiology, Pathogenesis, and Therapeutic AdvancesInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Air Quality Index Prediction Using Bi-LSTMDocumento8 pagineAir Quality Index Prediction Using Bi-LSTMInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Parastomal Hernia: A Case Report, Repaired by Modified Laparascopic Sugarbaker TechniqueDocumento2 pagineParastomal Hernia: A Case Report, Repaired by Modified Laparascopic Sugarbaker TechniqueInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Impact of Silver Nanoparticles Infused in Blood in A Stenosed Artery Under The Effect of Magnetic Field Imp. of Silver Nano. Inf. in Blood in A Sten. Art. Under The Eff. of Mag. FieldDocumento6 pagineImpact of Silver Nanoparticles Infused in Blood in A Stenosed Artery Under The Effect of Magnetic Field Imp. of Silver Nano. Inf. in Blood in A Sten. Art. Under The Eff. of Mag. FieldInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Predict The Heart Attack Possibilities Using Machine LearningDocumento2 paginePredict The Heart Attack Possibilities Using Machine LearningInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Parkinson's Detection Using Voice Features and Spiral DrawingsDocumento5 pagineParkinson's Detection Using Voice Features and Spiral DrawingsInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- SM 17 18 XII Mathematics Unit-3 Section-BDocumento6 pagineSM 17 18 XII Mathematics Unit-3 Section-BAkash PandeyNessuna valutazione finora
- Algebra Test SolutionsDocumento4 pagineAlgebra Test SolutionsJennifer Jai Eun HuhNessuna valutazione finora
- Markov Chains: Lecture 2Documento4 pagineMarkov Chains: Lecture 2shahilshah1919Nessuna valutazione finora
- Linear Programming: Dr. Asif Akhtar Assistant Professor Department of Business Administration, AMU Mob: 9897447806Documento18 pagineLinear Programming: Dr. Asif Akhtar Assistant Professor Department of Business Administration, AMU Mob: 9897447806Hitesh ParasharNessuna valutazione finora
- Numerical Methods For Civil Engineering PDFDocumento256 pagineNumerical Methods For Civil Engineering PDFq_giovanni0% (2)
- Introductory ProblemsDocumento2 pagineIntroductory ProblemspepeNessuna valutazione finora
- Small Stability SMIB ExampleDocumento8 pagineSmall Stability SMIB ExampleJaol1976Nessuna valutazione finora
- NGEC 4 Final ExamDocumento3 pagineNGEC 4 Final ExamJustiniano SalicioNessuna valutazione finora
- Sample Worksheet FromDocumento44 pagineSample Worksheet FromBecky Martinez0% (1)
- Indefinite IntegrationDocumento58 pagineIndefinite IntegrationSubrata KarmakarNessuna valutazione finora
- ICTprogram Update 25oct2016Documento34 pagineICTprogram Update 25oct2016Phạm Đức ThànhNessuna valutazione finora
- New Art March 06Documento16 pagineNew Art March 06api-27370939Nessuna valutazione finora
- Shs Genmath Module 8 Core Revised DuenasDocumento42 pagineShs Genmath Module 8 Core Revised DuenasAPRIL JOY ARREOLANessuna valutazione finora
- Introduction To Mathematical Thinking Algebra and Number Systems 1St Edition Gilbert Solutions Manual Full Chapter PDFDocumento67 pagineIntroduction To Mathematical Thinking Algebra and Number Systems 1St Edition Gilbert Solutions Manual Full Chapter PDFschahheelpost4ogl100% (11)
- Unit I Introduction: Mf7201 Optimization Techniques in ManufacturingDocumento3 pagineUnit I Introduction: Mf7201 Optimization Techniques in ManufacturingCody LeeNessuna valutazione finora
- Quadratic Factorization AssignmentDocumento4 pagineQuadratic Factorization Assignmentsaim sohailNessuna valutazione finora
- TCSS 343 HW5Documento2 pagineTCSS 343 HW5yadeliezer397Nessuna valutazione finora
- Functions Lesson Plans EdtpaDocumento7 pagineFunctions Lesson Plans Edtpaapi-272608829Nessuna valutazione finora
- Priya SopDocumento3 paginePriya Sopapi-141009395Nessuna valutazione finora
- 7.1 Define and Use Sequences SeriesDocumento33 pagine7.1 Define and Use Sequences SeriesSarthak JoshiNessuna valutazione finora
- Indian Mathematicians and Their ContributionsDocumento5 pagineIndian Mathematicians and Their ContributionsMukesh ChauhanNessuna valutazione finora
- Splitting Fields and Galois GroupsDocumento6 pagineSplitting Fields and Galois GroupsbfhahaNessuna valutazione finora
- Java Program SololearrnDocumento13 pagineJava Program SololearrnDamir KNessuna valutazione finora
- 15CS73 Module 4Documento60 pagine15CS73 Module 4KavyaNessuna valutazione finora
- Summative Test in MathDocumento1 paginaSummative Test in MathearnestNessuna valutazione finora
- Analysisof DifficultiesDocumento4 pagineAnalysisof DifficultiesNOIRNessuna valutazione finora
- Rapid Abacus GeneratorDocumento10 pagineRapid Abacus GeneratorDEEPAKNessuna valutazione finora
- Grade 4 2nd QUARTER TESTDocumento4 pagineGrade 4 2nd QUARTER TESTDenis CadotdotNessuna valutazione finora
- CADocumento11 pagineCAAnkita SondhiNessuna valutazione finora
- Programming in C by BalaguruswamyDocumento29 pagineProgramming in C by Balaguruswamy6A-Gayathri Kuppa67% (3)