Potrebbero piacerti anche
- Welding Procedure Specification (WPS) ASME CODE: BPVC Section IX, Edition 2015/ B31.3, Edition 2014 & ABS 2016 PART 2Documento3 pagineWelding Procedure Specification (WPS) ASME CODE: BPVC Section IX, Edition 2015/ B31.3, Edition 2014 & ABS 2016 PART 2Ahmad DanielNessuna valutazione finora
- WPS PQR PDFDocumento23 pagineWPS PQR PDFAhmad Daniel100% (1)
- LP Formulation MITDocumento27 pagineLP Formulation MITAhmad DanielNessuna valutazione finora
- NRC - 10 CFR Part 20-Standards For Protection Against RadiationDocumento81 pagineNRC - 10 CFR Part 20-Standards For Protection Against RadiationAhmad DanielNessuna valutazione finora
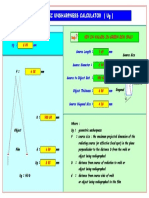
- UgCalculator V1.1Documento1 paginaUgCalculator V1.1Ahmad DanielNessuna valutazione finora
- API Exams CalculationsDocumento20 pagineAPI Exams CalculationssyedsayeediNessuna valutazione finora
- MT 10 Om 02 LDocumento20 pagineMT 10 Om 02 LAhmad DanielNessuna valutazione finora
- NRC Regulations for Industrial RadiographyDocumento24 pagineNRC Regulations for Industrial RadiographyAhmad DanielNessuna valutazione finora
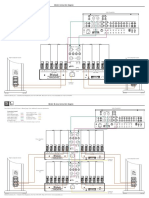
- MC452 Connection DiagramDocumento2 pagineMC452 Connection DiagramAhmad DanielNessuna valutazione finora
- Playing Arpeggios Over Changes Ex in DmajDocumento4 paginePlaying Arpeggios Over Changes Ex in DmajMiguel PereiraNessuna valutazione finora
- Target Band 7 Trial Listening Edition4Documento3 pagineTarget Band 7 Trial Listening Edition4Ahmad DanielNessuna valutazione finora
- CEng Pink BookDocumento46 pagineCEng Pink BookAhmad DanielNessuna valutazione finora
- MT 10 Om 02 LDocumento20 pagineMT 10 Om 02 LAhmad DanielNessuna valutazione finora
- NRC - 10 CFR Part 71-Packaging and Transportation of Radioactive MaterialDocumento70 pagineNRC - 10 CFR Part 71-Packaging and Transportation of Radioactive MaterialAhmad DanielNessuna valutazione finora
- Periodic Table IsotopesDocumento1 paginaPeriodic Table IsotopeslamantreveurNessuna valutazione finora
- Alessandro Amp ArticleDocumento1 paginaAlessandro Amp ArticleAhmad DanielNessuna valutazione finora
- Hamka Dibawah Lindungan KabahDocumento1 paginaHamka Dibawah Lindungan KabahAhmad DanielNessuna valutazione finora
- WPQ WeldCanada PDFDocumento1 paginaWPQ WeldCanada PDFAhmad DanielNessuna valutazione finora
- X-Desk X-Panded Recall SheetDocumento1 paginaX-Desk X-Panded Recall SheetAhmad DanielNessuna valutazione finora
- XLogic X-Desk Install GuideDocumento48 pagineXLogic X-Desk Install GuideAhmad DanielNessuna valutazione finora
- HFN Pro-JectClassic LowresDocumento3 pagineHFN Pro-JectClassic LowresAhmad DanielNessuna valutazione finora
- Blues Scale W/tapping: 3-Notes Per Strings Mayones School #5Documento1 paginaBlues Scale W/tapping: 3-Notes Per Strings Mayones School #5Ahmad DanielNessuna valutazione finora
- Bigsby Parts 2010Documento85 pagineBigsby Parts 2010Ahmad DanielNessuna valutazione finora
- WA Sabrina Hi Fi News 08-15Documento3 pagineWA Sabrina Hi Fi News 08-15Ahmad DanielNessuna valutazione finora
- Funk Guitar Rhythms Pt1 PDFDocumento2 pagineFunk Guitar Rhythms Pt1 PDFAlvaro RodriguesNessuna valutazione finora
- HFN Pro-JectClassic LowresDocumento3 pagineHFN Pro-JectClassic LowresAhmad DanielNessuna valutazione finora
- WA Sabrina Hi Fi News 08-15Documento3 pagineWA Sabrina Hi Fi News 08-15Ahmad DanielNessuna valutazione finora
- API 570 FormulasDocumento2 pagineAPI 570 FormulasArif Mokhtar89% (9)
- Audeze LCD-X PathosDocumento3 pagineAudeze LCD-X PathosAhmad DanielNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- HS1L DatasheetDocumento8 pagineHS1L DatasheetBlAdE 12Nessuna valutazione finora
- Marine Fuel Stability and Compatibility IssuesDocumento4 pagineMarine Fuel Stability and Compatibility IssuesRebekah SchmidtNessuna valutazione finora
- Detailed Statement: Transactions List - Squaircle Energy and Constructions Private Limited (Inr) - 677605600669Documento3 pagineDetailed Statement: Transactions List - Squaircle Energy and Constructions Private Limited (Inr) - 677605600669ankit008dixitNessuna valutazione finora
- A Day in The Life of A Proactive Maintenance TechnicianDocumento6 pagineA Day in The Life of A Proactive Maintenance TechnicianAshraf Al KirkuklyNessuna valutazione finora
- ZQYM Diesel Cummins Series Injector 2023.07Documento13 pagineZQYM Diesel Cummins Series Injector 2023.07harbh9355Nessuna valutazione finora
- The 717Documento2 pagineThe 717An LeNessuna valutazione finora
- DNS Amplification Attacks ExplainedDocumento13 pagineDNS Amplification Attacks ExplainedhammNessuna valutazione finora
- Value Chain Engineering Assignemnt IIDocumento22 pagineValue Chain Engineering Assignemnt IImaria50% (2)
- Types of Wind Turbines - Horizontal Axis and Vertical Axis ComparedDocumento1 paginaTypes of Wind Turbines - Horizontal Axis and Vertical Axis Comparedmendhi123Nessuna valutazione finora
- InRoom Tech Data 31010 ApcDocumento92 pagineInRoom Tech Data 31010 ApcRolandoNessuna valutazione finora
- Synopsis Mobile Banking AdministrationDocumento24 pagineSynopsis Mobile Banking AdministrationRaj BangaloreNessuna valutazione finora
- SUMMER TRAINING REPORT AT Elin Electronics Ltd. Gzb.Documento54 pagineSUMMER TRAINING REPORT AT Elin Electronics Ltd. Gzb.Ravi Kumar100% (3)
- Butter Smooth Slomo Slow Motion Sony Vegas EugeniaDocumento5 pagineButter Smooth Slomo Slow Motion Sony Vegas EugeniaJack BakerNessuna valutazione finora
- Electric Current and Ohm's Law - LecturesDocumento21 pagineElectric Current and Ohm's Law - LecturesMuhammad AhmadNessuna valutazione finora
- F Pv28T: PR EN 2714-013A/B/C/DDocumento2 pagineF Pv28T: PR EN 2714-013A/B/C/DFredNessuna valutazione finora
- HVX200 LentesDocumento2 pagineHVX200 Lentespink2004Nessuna valutazione finora
- How to ping NodeB and RNC using RTN transmission IPDocumento14 pagineHow to ping NodeB and RNC using RTN transmission IPPaulo DembiNessuna valutazione finora
- Nano Particle Characterization MethodsDocumento32 pagineNano Particle Characterization MethodsVignesh Raja PNessuna valutazione finora
- Techsheet ZerowasteDocumento2 pagineTechsheet ZerowastesunillimayeNessuna valutazione finora
- Utility Classes - Installation Guide: Dalestech LTDDocumento6 pagineUtility Classes - Installation Guide: Dalestech LTDbvitalNessuna valutazione finora
- AIR Intelligence Manual 33 308100 004 RemoteDocumento88 pagineAIR Intelligence Manual 33 308100 004 RemoteLeChancheNessuna valutazione finora
- West Bengal's Leather Industry OpportunitiesDocumento5 pagineWest Bengal's Leather Industry OpportunitiesDeepak AgarwalNessuna valutazione finora
- AlarmsReference ME-B 1212 PDFDocumento130 pagineAlarmsReference ME-B 1212 PDFNAGENDRA KUMAR DNessuna valutazione finora
- ISN SM 50 ManualDocumento8 pagineISN SM 50 Manualsinggih bramantyoNessuna valutazione finora
- The Future of HovercraftDocumento3 pagineThe Future of Hovercrafthovpod6214100% (4)
- AllProducts catalogGREENHECKDocumento52 pagineAllProducts catalogGREENHECKGenes Macalintal GalleneroNessuna valutazione finora
- Tu QuestionDocumento6 pagineTu QuestionKrishnaa BoraNessuna valutazione finora
- Table of Specification (Automated) v1Documento1 paginaTable of Specification (Automated) v1Ar WinNessuna valutazione finora
- A Young Lasallian Is US Environmental ScholarDocumento1 paginaA Young Lasallian Is US Environmental ScholarDia DimayugaNessuna valutazione finora
- SwephprgDocumento94 pagineSwephprgAbhisekAcharyaNessuna valutazione finora