Potrebbero piacerti anche
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Da EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Nessuna valutazione finora
- CHP 11 Part 2Documento24 pagineCHP 11 Part 2Valarmathi SaravananNessuna valutazione finora
- Block Diagram Representation: Loop or A Closed-Loop SystemDocumento63 pagineBlock Diagram Representation: Loop or A Closed-Loop SystemaliNessuna valutazione finora
- Chapter 11Documento46 pagineChapter 11ninoska217608Nessuna valutazione finora
- Chapter 10 - Stability of Closed-Loop Control SystemsDocumento27 pagineChapter 10 - Stability of Closed-Loop Control SystemsFakhrulShahrilEzanieNessuna valutazione finora
- Chapter 10 PDFDocumento26 pagineChapter 10 PDFPugazhendhi MuthuNessuna valutazione finora
- Generalized H2 ControlDocumento6 pagineGeneralized H2 ControlThanh Phong PhamNessuna valutazione finora
- 6 Kinetics and Transport Processes-43-63Documento21 pagine6 Kinetics and Transport Processes-43-63citlali almeidaNessuna valutazione finora
- Control Loop Cookbook PDFDocumento27 pagineControl Loop Cookbook PDFDmytro RakNessuna valutazione finora
- Lecture - 16-Enzyme Kinetics and Catalysis 1Documento36 pagineLecture - 16-Enzyme Kinetics and Catalysis 1Nagarjuna VuchuruNessuna valutazione finora
- Lec - 01-02 - EntropyDocumento23 pagineLec - 01-02 - EntropyJunaid KhanNessuna valutazione finora
- Marlin Ch10Documento53 pagineMarlin Ch10Alondra EnríquezNessuna valutazione finora
- 1672 6340 (2012) 01 0007 08 PDFDocumento6 pagine1672 6340 (2012) 01 0007 08 PDFbacuoc.nguyen356Nessuna valutazione finora
- Calculating Optimum SnubbersDocumento13 pagineCalculating Optimum SnubbersSatoTNessuna valutazione finora
- Transportation LagDocumento32 pagineTransportation LagshrikrisNessuna valutazione finora
- Transfer Function On RLC CircuitsDocumento38 pagineTransfer Function On RLC CircuitsMarasigan Ryan50% (2)
- 2.2 Dynamics of Feedback Control SystemsDocumento42 pagine2.2 Dynamics of Feedback Control SystemsJust RobotNessuna valutazione finora
- Control System Design Based On Frequency Response Analysis: Closed-Loop BehaviorDocumento53 pagineControl System Design Based On Frequency Response Analysis: Closed-Loop BehaviorCelsoMonNessuna valutazione finora
- IN 227 Control Systems DesignDocumento13 pagineIN 227 Control Systems DesignAbhinavNessuna valutazione finora
- 3 HVDocumento6 pagine3 HVSparsh AgarwalNessuna valutazione finora
- Chapter 11Documento61 pagineChapter 11AimiKhanNessuna valutazione finora
- More General Transfer Function Models: Bs Gs AsDocumento21 pagineMore General Transfer Function Models: Bs Gs As李承家Nessuna valutazione finora
- Theory: Name: Onkar Pardeshi Roll - No: 12 P.R.N: 12011027 Batch-B1Documento6 pagineTheory: Name: Onkar Pardeshi Roll - No: 12 P.R.N: 12011027 Batch-B1Onkar BhosleNessuna valutazione finora
- Exercise 8 Kinetics of Hydrolysis of Ethyl AcetateDocumento6 pagineExercise 8 Kinetics of Hydrolysis of Ethyl AcetatePalak BansalNessuna valutazione finora
- PH4211 Statistical Mechanics: Problem Sheet 5Documento2 paginePH4211 Statistical Mechanics: Problem Sheet 5Roy VeseyNessuna valutazione finora
- CHAPTER 11: Dynamic Behaviour & Stability of Closed-Loop Control SystemsDocumento69 pagineCHAPTER 11: Dynamic Behaviour & Stability of Closed-Loop Control Systemshakita86Nessuna valutazione finora
- Andreas Glatz, Sanjay Kumar and Mai Suan Li - Collective Dynamics of One-Dimensional Charge Density WavesDocumento5 pagineAndreas Glatz, Sanjay Kumar and Mai Suan Li - Collective Dynamics of One-Dimensional Charge Density WavesYamcsaNessuna valutazione finora
- Chapter 11 (11-23-04)Documento61 pagineChapter 11 (11-23-04)sruthimeena6891Nessuna valutazione finora
- Stability of Closed-Loop Control SystemsDocumento19 pagineStability of Closed-Loop Control SystemsThrishnaa BalasupurManiamNessuna valutazione finora
- Transient Response Counts When Choosing Phase MarginDocumento4 pagineTransient Response Counts When Choosing Phase Marginharis13harisNessuna valutazione finora
- Unit 6 - Dynamic Behaviour of Higher Order System Part 2 Edited.....Documento44 pagineUnit 6 - Dynamic Behaviour of Higher Order System Part 2 Edited.....rafitara78Nessuna valutazione finora
- Inno2019 EMT4203 CONTROL II Chap1 Control ActionsDocumento18 pagineInno2019 EMT4203 CONTROL II Chap1 Control Actionskabuej3Nessuna valutazione finora
- Notes On Control With DelayDocumento43 pagineNotes On Control With DelaySumit ChakravartyNessuna valutazione finora
- Chapter 11 Chang.1Documento34 pagineChapter 11 Chang.1satya sagarNessuna valutazione finora
- Chapter 2: Feedback TheoryDocumento29 pagineChapter 2: Feedback TheoryMobin AkhtarNessuna valutazione finora
- Me 471 Closed Loop Hydraulic Positioning SystemDocumento4 pagineMe 471 Closed Loop Hydraulic Positioning SystemAbhishek KumbalurNessuna valutazione finora
- Automatic Generation ControlDocumento12 pagineAutomatic Generation Controlrois tazNessuna valutazione finora
- Transients: Circuit Having Sources Is - Said To Be in Steady State If TheDocumento7 pagineTransients: Circuit Having Sources Is - Said To Be in Steady State If TheBhuvan BharadwajNessuna valutazione finora
- F44128640 Homework 2 LCS DING JoelDocumento16 pagineF44128640 Homework 2 LCS DING JoelNotnowNessuna valutazione finora
- A Robustly Stable Output Feedback Saturated Controller For The BDocumento6 pagineA Robustly Stable Output Feedback Saturated Controller For The BAMIR SOHAILNessuna valutazione finora
- IN 227 Control Systems DesignDocumento11 pagineIN 227 Control Systems DesignAbhinavNessuna valutazione finora
- J.M. Smith, Hendrick Van Ness, 2 - CompressedDocumento9 pagineJ.M. Smith, Hendrick Van Ness, 2 - CompressedFelix LauwentoNessuna valutazione finora
- Phase Margin and Quality FactorDocumento7 paginePhase Margin and Quality FactorVIJAYPUTRANessuna valutazione finora
- 05 - Second Order System and Higher OrderDocumento10 pagine05 - Second Order System and Higher OrderStellaNessuna valutazione finora
- Callueng, Jomhel & Pasicolan, ChristianDocumento13 pagineCallueng, Jomhel & Pasicolan, ChristianJomhel CalluengNessuna valutazione finora
- Samplenote Chapter 5 Thermodynamics 1 1465348673 57577241000da 214217Documento33 pagineSamplenote Chapter 5 Thermodynamics 1 1465348673 57577241000da 214217RISHABH GAURNessuna valutazione finora
- Controller Design Using Root Locus: 14.1 PD ControlDocumento11 pagineController Design Using Root Locus: 14.1 PD Controlasalifew belachewNessuna valutazione finora
- CRE - Deactivating CatalystsDocumento28 pagineCRE - Deactivating Catalystsandono kusuma jatiNessuna valutazione finora
- Model Questions Class Test SolutionDocumento22 pagineModel Questions Class Test SolutionAnanthan SrijithNessuna valutazione finora
- Steady-State Analysis of The LLC Series Resonant ConverterDocumento8 pagineSteady-State Analysis of The LLC Series Resonant Converter章肇珩Nessuna valutazione finora
- 2016-PRL-Controlling Strain Bursts and Avalanches at The Nano - To Micrometer ScaleDocumento5 pagine2016-PRL-Controlling Strain Bursts and Avalanches at The Nano - To Micrometer Scaleliuze103Nessuna valutazione finora
- Assignment2 MateoRendon 94907193Documento12 pagineAssignment2 MateoRendon 94907193Mateo RendonNessuna valutazione finora
- Reactor de Flujo LaminarDocumento4 pagineReactor de Flujo LaminarAyerim ValenzuelaNessuna valutazione finora
- Kinetics of Hydrolysis of Ethyl EsterDocumento6 pagineKinetics of Hydrolysis of Ethyl EsterJawad AhmadNessuna valutazione finora
- ConverterDocumento7 pagineConverterjoanelias45Nessuna valutazione finora
- Methods and Algorithms For Advanced Process ControlDocumento8 pagineMethods and Algorithms For Advanced Process ControlJohn CoucNessuna valutazione finora
- Barkhausen CriterionDocumento7 pagineBarkhausen Criterionrammar147Nessuna valutazione finora
- TOPIC 4.0 The Dynamic Behavior of Feedback - Controlled ProcessesDocumento7 pagineTOPIC 4.0 The Dynamic Behavior of Feedback - Controlled ProcessesByron MawoyoNessuna valutazione finora
- Physical ChemistryDocumento5 paginePhysical ChemistryAhmed HashkarNessuna valutazione finora
- Control System Design Based On Frequency Response Analysis: Closed-Loop BehaviorDocumento53 pagineControl System Design Based On Frequency Response Analysis: Closed-Loop Behaviorsatya sagarNessuna valutazione finora
- Country Report For PetrochemicalDocumento25 pagineCountry Report For PetrochemicalTusenkrishNessuna valutazione finora
- Refining Process-Catalytic Reforming, IsomerizationDocumento32 pagineRefining Process-Catalytic Reforming, IsomerizationTusenkrish100% (1)
- Refining Process-AlkylationDocumento20 pagineRefining Process-AlkylationTusenkrishNessuna valutazione finora
- F-MECA For Centrifugal PumpDocumento4 pagineF-MECA For Centrifugal PumpTusenkrish100% (3)
- Refining Process-PolymerizationDocumento13 pagineRefining Process-PolymerizationTusenkrishNessuna valutazione finora
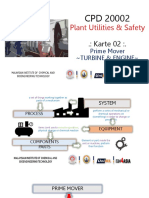
- KARTE 02.b Prime Mover (Turbine & Engine)Documento63 pagineKARTE 02.b Prime Mover (Turbine & Engine)TusenkrishNessuna valutazione finora
- Safe Operation of Reboilers Condensers in Air Separation UnitsDocumento31 pagineSafe Operation of Reboilers Condensers in Air Separation UnitsTusenkrishNessuna valutazione finora
- Problem-Based Learning Interpersonal/ Communication Skills: Syerinasyahrin Professional English2: Semester Sept 2015Documento4 pagineProblem-Based Learning Interpersonal/ Communication Skills: Syerinasyahrin Professional English2: Semester Sept 2015TusenkrishNessuna valutazione finora
- KARTE 04 Installation, Commissioning and TestingDocumento41 pagineKARTE 04 Installation, Commissioning and TestingTusenkrish100% (2)
- Processing of Edible Oil (Palm Oil)Documento33 pagineProcessing of Edible Oil (Palm Oil)TusenkrishNessuna valutazione finora
- 1.6 Palm Oil Mill Effluent (POME)Documento25 pagine1.6 Palm Oil Mill Effluent (POME)TusenkrishNessuna valutazione finora
- QNET Practical Control GuideDocumento96 pagineQNET Practical Control GuideSoham SahaNessuna valutazione finora
- Soros ReflexivityDocumento1 paginaSoros Reflexivityblue222Nessuna valutazione finora
- CFOA Based OscillatorsDocumento11 pagineCFOA Based Oscillatorsسعيد عبدالله فرحانNessuna valutazione finora
- B603 Series Users ManualDocumento36 pagineB603 Series Users ManualVina MainNessuna valutazione finora
- Moog ServoValves 72series Catalog enDocumento20 pagineMoog ServoValves 72series Catalog enChristopher YsitNessuna valutazione finora
- Development of Automatic Smart Waste Sorter MachineDocumento8 pagineDevelopment of Automatic Smart Waste Sorter MachineAbhishek TekeNessuna valutazione finora
- Providing Educational Feedback: Higher Education ServicesDocumento8 pagineProviding Educational Feedback: Higher Education Servicesدكتور محمد عسكرNessuna valutazione finora
- Turbine Control ManualDocumento27 pagineTurbine Control ManualAnton Hidayat100% (1)
- BodeDocumento1 paginaBodeAlexis Diaz SalasNessuna valutazione finora
- Katalog SigmaV PDFDocumento476 pagineKatalog SigmaV PDFIchal DafianNessuna valutazione finora
- Control Engineering PDFDocumento164 pagineControl Engineering PDFsanthoshramrNessuna valutazione finora
- Real Time Error Codes: Pruebas y AjustesDocumento4 pagineReal Time Error Codes: Pruebas y AjustesAugusto BellezaNessuna valutazione finora
- 1.1 Definition and History of Feedback and Control Systems Group 1Documento16 pagine1.1 Definition and History of Feedback and Control Systems Group 1K yENessuna valutazione finora
- مختبر سيطرهDocumento66 pagineمختبر سيطرهKaesar SabahNessuna valutazione finora
- ESS - Topic 1 NotesDocumento6 pagineESS - Topic 1 NotesNicoleNessuna valutazione finora
- Zapi EPS AC WGmanualengDocumento132 pagineZapi EPS AC WGmanualengAnselmo Val100% (6)
- Lecture 02 AV-356 System ModelingDocumento28 pagineLecture 02 AV-356 System ModelingUsama NazirNessuna valutazione finora
- Drive Panasonic A5 Manu 01Documento48 pagineDrive Panasonic A5 Manu 01aaauserhoyNessuna valutazione finora
- MCTC-KZ-B0S To Customer Side Protocol Details V1.2Documento14 pagineMCTC-KZ-B0S To Customer Side Protocol Details V1.2John ClarenceNessuna valutazione finora
- CNX-B Designer Keypads: SpecificationsDocumento3 pagineCNX-B Designer Keypads: SpecificationsRutyPesantesCastilloNessuna valutazione finora
- AQM - Quality Palnning ProcessDocumento47 pagineAQM - Quality Palnning ProcessRAZOR GAMINGNessuna valutazione finora
- 79-0039-0068-00-TED-ENX-05 - Axis Control PCU310Documento49 pagine79-0039-0068-00-TED-ENX-05 - Axis Control PCU310Jeffrey Perez100% (1)
- Tuning of Type-1 Servo System Using Swarm Intelligence For SIMO ProcessDocumento4 pagineTuning of Type-1 Servo System Using Swarm Intelligence For SIMO ProcessAnonymous WkbmWCa8MNessuna valutazione finora
- WarnerElectric Quadraline 7000 Spe-736377513cDocumento24 pagineWarnerElectric Quadraline 7000 Spe-736377513cLeonardo Vinicio Olarte CarrilloNessuna valutazione finora
- The Design of Soft Starter For AC Motors Based On Single Neuron PI RegulatorDocumento5 pagineThe Design of Soft Starter For AC Motors Based On Single Neuron PI RegulatorMega Firdausi NuzullaNessuna valutazione finora
- Positioner: Installation Operation and Maintenance ManualDocumento131 paginePositioner: Installation Operation and Maintenance ManualRADHAKRISHNANNessuna valutazione finora
- The PID Control Algorithm: How It Works and How To Tune ItDocumento64 pagineThe PID Control Algorithm: How It Works and How To Tune ItrvhallNessuna valutazione finora
- The Theory of Transient Intermodulation Distortion: Too ItDocumento7 pagineThe Theory of Transient Intermodulation Distortion: Too Itgiordanobi859641Nessuna valutazione finora
- System Thinking Simplified NotesDocumento25 pagineSystem Thinking Simplified NotesharriediskandarNessuna valutazione finora
- Brain Computer Interfacewithg MOBIlabDocumento13 pagineBrain Computer Interfacewithg MOBIlab60565882Nessuna valutazione finora