Potrebbero piacerti anche
- Engrenagens cilíndricas: nomenclatura, perfis, interferência e lei fundamentalDocumento89 pagineEngrenagens cilíndricas: nomenclatura, perfis, interferência e lei fundamentalArthurBuzoganyNessuna valutazione finora
- Aços e Seus Tratamentos TérmicosDocumento90 pagineAços e Seus Tratamentos TérmicosAngelo LeãoNessuna valutazione finora
- Apostila Metrologia UsinagemDocumento65 pagineApostila Metrologia UsinagemLEONARDOUS7Nessuna valutazione finora
- 5.elementos de TransmissâoDocumento22 pagine5.elementos de TransmissâoInês PereiraNessuna valutazione finora
- Apostila de Fresagem-EniacDocumento18 pagineApostila de Fresagem-EniacilledratNessuna valutazione finora
- Aula - 09 - Buchas e Guias - InternetDocumento36 pagineAula - 09 - Buchas e Guias - InternetrafaelcsehnNessuna valutazione finora
- Processos de Usinagem EssenciaisDocumento31 pagineProcessos de Usinagem EssenciaisSr_IncrivelNessuna valutazione finora
- Turbinas BulboDocumento21 pagineTurbinas BulboGabrielNessuna valutazione finora
- Programador e Operador de Torno A CNC - FudamentosDocumento58 pagineProgramador e Operador de Torno A CNC - FudamentosLuiz Cezario0% (1)
- Guia Pratico em Programação TORNO CNC Hyundai / FanucDocumento76 pagineGuia Pratico em Programação TORNO CNC Hyundai / FanucDanielgenio10 Josesigilo1Nessuna valutazione finora
- Identificacao ISO Das Pastilhas Ou InsertosDocumento20 pagineIdentificacao ISO Das Pastilhas Ou InsertosWellington Ghezzi100% (1)
- 50 Conjuntos Mecanicos VDocumento11 pagine50 Conjuntos Mecanicos VRafael DelaiNessuna valutazione finora
- Anel GraduadoDocumento5 pagineAnel GraduadoCaio2101Nessuna valutazione finora
- Fdocumentos - Tips Apostila de Torno CNC Senai BrasDocumento98 pagineFdocumentos - Tips Apostila de Torno CNC Senai BrasCristhian HonoratoNessuna valutazione finora
- Torno mecânico: operações e partes principaisDocumento302 pagineTorno mecânico: operações e partes principaisRonaldoNessuna valutazione finora
- Apostila CNCDocumento132 pagineApostila CNCferramentaria.ipel100% (1)
- Currículo 01Documento3 pagineCurrículo 01Rafael Rodrigues100% (1)
- Apostila de Operação Do Centro de UsinagemDocumento54 pagineApostila de Operação Do Centro de UsinagemMichael Felipe FerreiraNessuna valutazione finora
- MR-9400VC Fresadora FerramentariaDocumento1 paginaMR-9400VC Fresadora FerramentariaCecilio Díaz GijónNessuna valutazione finora
- FresadoraDocumento14 pagineFresadoraFernando SimõesNessuna valutazione finora
- Tabelas EngrenagemDocumento12 pagineTabelas EngrenagemEvertonNessuna valutazione finora
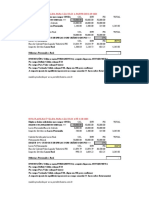
- Calculando rpm e gpmDocumento6 pagineCalculando rpm e gpmAlison DenizeNessuna valutazione finora
- Fresamento: tipos de fresas e operaçõesDocumento14 pagineFresamento: tipos de fresas e operaçõesromao10Nessuna valutazione finora
- USINAGEM EM ALTA VELOCIDADE PERMITE MAIOR PRODUTIVIDADE E FLEXIBILIDADEDocumento14 pagineUSINAGEM EM ALTA VELOCIDADE PERMITE MAIOR PRODUTIVIDADE E FLEXIBILIDADEEdmilson C. LaurindoNessuna valutazione finora
- Cabecote DivisorDocumento40 pagineCabecote DivisorJomaso27100% (2)
- Trabalho PlainaDocumento49 pagineTrabalho PlainaHenry HcNessuna valutazione finora
- Artigo UsinagemDocumento8 pagineArtigo UsinagemRenan Coswosk da SilvaNessuna valutazione finora
- 27 Anel Graduado Do TornoDocumento6 pagine27 Anel Graduado Do TornorobertoNessuna valutazione finora
- Cálculos Das EngrenagensDocumento13 pagineCálculos Das Engrenagenseliseuhenrique67% (3)
- Usinagem de foguete no torno mecânicoDocumento5 pagineUsinagem de foguete no torno mecânicopaulohndNessuna valutazione finora
- G71 - Ciclo automático de desbaste longitudinal FanucDocumento2 pagineG71 - Ciclo automático de desbaste longitudinal FanucLucas TanjoniNessuna valutazione finora
- Master CamDocumento199 pagineMaster CamDaniel GaldinoNessuna valutazione finora
- Mandriladoras emDocumento13 pagineMandriladoras emMilton HenriqueNessuna valutazione finora
- Usinagem HSMDocumento26 pagineUsinagem HSMLaércio FerreiraNessuna valutazione finora
- Iniciação ao Comando NuméricoDocumento90 pagineIniciação ao Comando NuméricoOziel Cristiano SantosNessuna valutazione finora
- 07-Usinabilidade Dos MateriaisDocumento28 pagine07-Usinabilidade Dos MateriaisDaniel PontesNessuna valutazione finora
- HD2200 PT PDFDocumento512 pagineHD2200 PT PDFJosé Francisco Ramos Teixeira100% (1)
- Máquinas CNCDocumento9 pagineMáquinas CNCTiago RodriguesNessuna valutazione finora
- Folder TKSA 71 SKFDocumento4 pagineFolder TKSA 71 SKFMarcosNessuna valutazione finora
- Tabela de Referência para Aços da AméricaDocumento1 paginaTabela de Referência para Aços da Américaedson16087984Nessuna valutazione finora
- Aula 6 - EixosDocumento19 pagineAula 6 - EixosZickson ManjateNessuna valutazione finora
- Usinagem RetificaçãoDocumento20 pagineUsinagem RetificaçãoDemétrio ZacariasNessuna valutazione finora
- Caracterização do desgaste e aumento da vida útil de punções/matrizes de aço S390 em estampagemDocumento58 pagineCaracterização do desgaste e aumento da vida útil de punções/matrizes de aço S390 em estampagemMarceloNessuna valutazione finora
- Engaxetamento de BombaDocumento26 pagineEngaxetamento de BombaSérgio BlackNessuna valutazione finora
- NX 8.0 Mill Manufacturing - 3x Cavity Mill Operation GuideDocumento62 pagineNX 8.0 Mill Manufacturing - 3x Cavity Mill Operation Guideabelmil123Nessuna valutazione finora
- Aula 15 Ciclo de Roscamento - TorneamentoDocumento6 pagineAula 15 Ciclo de Roscamento - TorneamentoJunior GuedesNessuna valutazione finora
- Usinagem Por EletroerosãoDocumento30 pagineUsinagem Por EletroerosãoRafael CavalcantiNessuna valutazione finora
- Catalogo Romi PDFDocumento80 pagineCatalogo Romi PDFFreddy Mamani Atayupanqui100% (1)
- Aws A24 98 Norma SoldagemDocumento74 pagineAws A24 98 Norma SoldagemCésarNessuna valutazione finora
- Fresamento: processo de fabricação por remoção de cavacosDocumento89 pagineFresamento: processo de fabricação por remoção de cavacoseder_peruchNessuna valutazione finora
- Padrão de RoscasDocumento216 paginePadrão de RoscasAllan EfftingNessuna valutazione finora
- Instalação e manutenção de bombas magnéticasDocumento26 pagineInstalação e manutenção de bombas magnéticasFelipe MachadoNessuna valutazione finora
- Aplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoDa EverandAplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoNessuna valutazione finora
- Programação Em Assembly Para O Microcontrolador Pic12f Volume IDa EverandProgramação Em Assembly Para O Microcontrolador Pic12f Volume IValutazione: 5 su 5 stelle5/5 (1)
- Acionamento Remoto De Televisor Com Gsm Usando Comandos Sms Com Módulo Sim800l Programado No ArduinoDa EverandAcionamento Remoto De Televisor Com Gsm Usando Comandos Sms Com Módulo Sim800l Programado No ArduinoNessuna valutazione finora
- Alteração ou anulação de inscrição acadêmicaDocumento2 pagineAlteração ou anulação de inscrição acadêmicaEng BruccyNessuna valutazione finora
- OrcamentoDocumento2 pagineOrcamentoRoberto de Almeida GuerraNessuna valutazione finora
- Pro AliDocumento2 paginePro AliPtx BsbNessuna valutazione finora
- Apostila - Car Pint Aria - Bancada para MarcenariaDocumento5 pagineApostila - Car Pint Aria - Bancada para MarcenariaSamuel Aparecido Santos100% (1)
- Programador e Operador de Torno A CNC - MCS 505Documento126 pagineProgramador e Operador de Torno A CNC - MCS 505William Giacometti88% (8)
- Pro AliDocumento2 paginePro AliPtx BsbNessuna valutazione finora
- PeqrealDocumento3 paginePeqrealWilliam GiacomettiNessuna valutazione finora
- Tutorial para trabalhar com tupia na horizontalDocumento41 pagineTutorial para trabalhar com tupia na horizontalWilliam GiacomettiNessuna valutazione finora
- Estante para ParedeDocumento7 pagineEstante para ParedeWilliam GiacomettiNessuna valutazione finora
- Estante para ParedeDocumento7 pagineEstante para ParedeWilliam GiacomettiNessuna valutazione finora
- Manual Operacao TCS2ADocumento78 pagineManual Operacao TCS2AWilliam Giacometti100% (1)
- MAN 8055 I T PRGDocumento336 pagineMAN 8055 I T PRGjpfpaivaNessuna valutazione finora
- Cultura 5S SlidesDocumento10 pagineCultura 5S SlidesWilliam GiacomettiNessuna valutazione finora
- Adrieli Dos Santos Alves: Formação AcadêmicaDocumento1 paginaAdrieli Dos Santos Alves: Formação AcadêmicaWilliam GiacomettiNessuna valutazione finora
- All in The Blood TraducaoDocumento35 pagineAll in The Blood TraducaoWilliam GiacomettiNessuna valutazione finora
- Procedimento TerminalDocumento5 pagineProcedimento TerminalWilliam GiacomettiNessuna valutazione finora
- (D&D 5E) Magias PT-BR PDFDocumento79 pagine(D&D 5E) Magias PT-BR PDFSandro Vernetti67% (3)
- Catalogo Fixadores BelenusDocumento287 pagineCatalogo Fixadores BelenusWilliam Giacometti100% (1)
- Curso de Digitação RemingtonDocumento55 pagineCurso de Digitação RemingtonRafael100% (7)
- Ficha Anciões Vampiro A MascaraDocumento6 pagineFicha Anciões Vampiro A MascaraLucas Danto Octávio100% (1)
- Apostila Cultura 5sDocumento25 pagineApostila Cultura 5sWilliam GiacomettiNessuna valutazione finora
- LA À NoiteDocumento123 pagineLA À NoitePedro HenriqueNessuna valutazione finora
- LichDocumento4 pagineLichHauwksNessuna valutazione finora
- Apostila Cultura 5sDocumento25 pagineApostila Cultura 5sWilliam GiacomettiNessuna valutazione finora
- ApostilaCorelDraw9 0010Documento46 pagineApostilaCorelDraw9 0010William GiacomettiNessuna valutazione finora
- Siemens 828 DPG 0310 PTB PT-BRDocumento596 pagineSiemens 828 DPG 0310 PTB PT-BRMaquinaTelaNessuna valutazione finora
- Centro de usinagem MitsubishiDocumento104 pagineCentro de usinagem Mitsubishiwarlikes100% (1)
- Apostila Cultura 5sDocumento25 pagineApostila Cultura 5sWilliam GiacomettiNessuna valutazione finora
- Exame Físico - Valores de RefDocumento4 pagineExame Físico - Valores de RefJullia GuimarãesNessuna valutazione finora
- Receitas Doces - Livro DigitalDocumento68 pagineReceitas Doces - Livro DigitalnayellenNessuna valutazione finora
- Livro Ebook o Servo JesusDocumento48 pagineLivro Ebook o Servo Jesusxero.srsNessuna valutazione finora
- Meningite: Infeções do CérebroDocumento5 pagineMeningite: Infeções do CérebroJorge EstrelaNessuna valutazione finora
- Especificação Técnica Pá CarregadeiraDocumento14 pagineEspecificação Técnica Pá CarregadeiraPaulo Villas Boas CamaraNessuna valutazione finora
- AMT Cartilha Empresas Parceiras Versão08.11.21Documento36 pagineAMT Cartilha Empresas Parceiras Versão08.11.21Marco Aurelio CunhaNessuna valutazione finora
- Concurso de Admissão 2020/2021 Prova de MatemáticaDocumento22 pagineConcurso de Admissão 2020/2021 Prova de MatemáticaFernandaNessuna valutazione finora
- A Teoria Crítica: uma análise da distinção entre teoria e práticaDocumento69 pagineA Teoria Crítica: uma análise da distinção entre teoria e práticarodrigosa183288% (8)
- ExistencialismoDocumento3 pagineExistencialismoRaykelly Alves100% (1)
- Bula Rocefin IM IV PacienteDocumento16 pagineBula Rocefin IM IV PacienteRealidade Paralela de RafaelaNessuna valutazione finora
- Receptores Radiográficos e Telas IntensificadorasDocumento24 pagineReceptores Radiográficos e Telas IntensificadorasRhanderson MoreiraNessuna valutazione finora
- MAGIA DOS DRAGÕESDocumento26 pagineMAGIA DOS DRAGÕESNoctos Fafnir100% (2)
- Texto - Idade Média e Moderna-Fronteiras e Problemas - Laura de Mello e SouzaDocumento14 pagineTexto - Idade Média e Moderna-Fronteiras e Problemas - Laura de Mello e SouzaSamira BullyNessuna valutazione finora
- Especialização em Engenharia Geotécnica - 400h - Turma II - InbecDocumento7 pagineEspecialização em Engenharia Geotécnica - 400h - Turma II - InbecDaniloNessuna valutazione finora
- Atividade Controle Da Dor NeuropáticaDocumento5 pagineAtividade Controle Da Dor NeuropáticaSamantha MonteiroNessuna valutazione finora
- Técnicas de corte e tipos de papelDocumento58 pagineTécnicas de corte e tipos de papelElisabete AguiarNessuna valutazione finora
- CRLV Digital VW Gol 1997/1998Documento1 paginaCRLV Digital VW Gol 1997/1998Allan Agostini100% (1)
- HidroterapiaDocumento5 pagineHidroterapiaTelma Alexandra Sousa100% (2)
- Boletim-Tecnico Creme de Proteção 26632Documento1 paginaBoletim-Tecnico Creme de Proteção 26632Marcos AntonioNessuna valutazione finora
- NBR 15112 PDFDocumento11 pagineNBR 15112 PDFKárita Kanaiama82% (17)
- Amor Perfeito / Tô Fazendo Falta / As Quatro Estações (Pot-PourriDocumento1 paginaAmor Perfeito / Tô Fazendo Falta / As Quatro Estações (Pot-PourriAlef CarvalhoNessuna valutazione finora
- KOSELLECK Reinhart O Conceito de HistoriDocumento114 pagineKOSELLECK Reinhart O Conceito de HistoriAmós AíasNessuna valutazione finora
- Simula Alunos PNE 2º BimestreDocumento4 pagineSimula Alunos PNE 2º BimestreJiselly da silva lobatoNessuna valutazione finora
- Aulão 2 No Ritmo Dos Descritores 2023Documento26 pagineAulão 2 No Ritmo Dos Descritores 2023Rozana SilvaNessuna valutazione finora
- 8 Jan 23Documento10 pagine8 Jan 23Edson Aparecido BarbozaNessuna valutazione finora
- Toyotismo - Gestão e Organização HorizontalDocumento25 pagineToyotismo - Gestão e Organização HorizontalmzrapperNessuna valutazione finora
- Simulado ENA - Problemas de MatemáticaDocumento8 pagineSimulado ENA - Problemas de MatemáticaUedson Felix RodriguesNessuna valutazione finora
- Código numérico das funções dos dispositivos de manobra, controle e proteção de sistemas de potênciaDocumento8 pagineCódigo numérico das funções dos dispositivos de manobra, controle e proteção de sistemas de potênciaaltieresmiranda100% (1)
- Poluição Marítima Moçambique Causas Consequências MedidasDocumento9 paginePoluição Marítima Moçambique Causas Consequências MedidasJoaquim Saldeira ManuelNessuna valutazione finora
- 001 Prodol GreenDocumento13 pagine001 Prodol GreenEletro BNessuna valutazione finora