Potrebbero piacerti anche
- Exposición Fibra ÓpticaDocumento9 pagineExposición Fibra ÓpticaLuis LasterNessuna valutazione finora
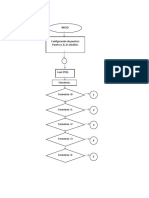
- Diagrama de Flujo CuboDocumento6 pagineDiagrama de Flujo CuboLuis LasterNessuna valutazione finora
- Cap 2 de CiscoDocumento72 pagineCap 2 de CiscoLuis LasterNessuna valutazione finora
- Libro de Pds TraducidoDocumento178 pagineLibro de Pds TraducidoLuis LasterNessuna valutazione finora
- Prop. Redes Básicas-V4 (Resum1da)Documento6 pagineProp. Redes Básicas-V4 (Resum1da)Sergio MirelesNessuna valutazione finora
- Elementos ParasitosDocumento7 pagineElementos ParasitosLuis LasterNessuna valutazione finora
- Practica-3-Dipolos y MonopolosDocumento4 paginePractica-3-Dipolos y MonopolosLuis LasterNessuna valutazione finora
- La Familia Del SolDocumento3 pagineLa Familia Del SolLuis LasterNessuna valutazione finora
- Practica-3-Dipolos y MonopolosDocumento4 paginePractica-3-Dipolos y MonopolosLuis LasterNessuna valutazione finora
- Practica 1 RadiadoresDocumento5 paginePractica 1 RadiadoresLuis LasterNessuna valutazione finora
- Ley de Coulomb y Campo EléctricoDocumento5 pagineLey de Coulomb y Campo EléctricoLuis LasterNessuna valutazione finora
- Trabajo de Investigacion Reporte HidraulicaDocumento19 pagineTrabajo de Investigacion Reporte HidraulicaEzekiel Moreno100% (1)
- Guía P. 6 - 201810 Diagnóstico Del Embrague de Transmisión ManualDocumento6 pagineGuía P. 6 - 201810 Diagnóstico Del Embrague de Transmisión ManualDayana LizethNessuna valutazione finora
- Manual Ahmsa 2013-2 25Documento10 pagineManual Ahmsa 2013-2 25Ricardo GallardoNessuna valutazione finora
- Pin SPPB 1 15002 Aux Id Ele Et 001 1Documento43 paginePin SPPB 1 15002 Aux Id Ele Et 001 1Cesar BernalNessuna valutazione finora
- Niveleteado para Una TuberiaDocumento14 pagineNiveleteado para Una TuberiaRaul Bernal ValladaresNessuna valutazione finora
- IPERC Elementos EstructuralesDocumento2 pagineIPERC Elementos EstructuralesToribio YaninaNessuna valutazione finora
- Practicas TIVADocumento25 paginePracticas TIVAJorge GarciaNessuna valutazione finora
- CuestionarioDocumento10 pagineCuestionarioLuis FherNessuna valutazione finora
- Astm 1202-17Documento8 pagineAstm 1202-17Jhaiiler Zlatan100% (1)
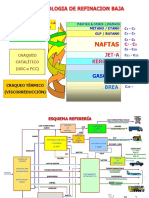
- Esquema RefinacionDocumento3 pagineEsquema RefinacionIale LHNessuna valutazione finora
- Estructura Mantenimiento e Instalacion de Sistemas Solares FotovoltaicosDocumento35 pagineEstructura Mantenimiento e Instalacion de Sistemas Solares Fotovoltaicosjgmaestrer5861Nessuna valutazione finora
- Stretto PDFDocumento16 pagineStretto PDFEdson Thoniño Palomino La Fuente0% (1)
- Diseño de Escalera y LosaDocumento78 pagineDiseño de Escalera y LosaKyle LeonardNessuna valutazione finora
- Apd y BoosterDocumento12 pagineApd y BoosterSebastian MatiasNessuna valutazione finora
- Manual de Taladro SantleyDocumento15 pagineManual de Taladro SantleyBilly FletcherNessuna valutazione finora
- Bal 11 - Salgado - Sistemas de Trans. y Distribucion0001Documento20 pagineBal 11 - Salgado - Sistemas de Trans. y Distribucion0001marco curo quispeNessuna valutazione finora
- Shantuicatalogodeproductosv 2011es 121212145958 Phpapp01Documento36 pagineShantuicatalogodeproductosv 2011es 121212145958 Phpapp01guillermoNessuna valutazione finora
- Liquidos Penetrantes CAP I II RotaricaDocumento30 pagineLiquidos Penetrantes CAP I II RotaricakarlambNessuna valutazione finora
- S1-YXZE16C Hino 300 ElectricoDocumento140 pagineS1-YXZE16C Hino 300 ElectricoAxles94% (16)
- Camara de Distribucion de CaudalesDocumento64 pagineCamara de Distribucion de CaudalesJesus Laura de la Cruz100% (1)
- Diagrama de Avance de ObraDocumento2 pagineDiagrama de Avance de Obralorena junesNessuna valutazione finora
- Perfil Plan de MarketingDocumento34 paginePerfil Plan de MarketingVICTORNessuna valutazione finora
- Seguridad en La ConstruccionDocumento29 pagineSeguridad en La ConstruccionEduOliveraGuevaraNessuna valutazione finora
- Sistema de RefrigeracionDocumento8 pagineSistema de RefrigeracionLuis Lastra100% (3)
- Manual Del MontacargasDocumento29 pagineManual Del MontacargasGrover ApazaNessuna valutazione finora
- Valorizacion 1Documento7 pagineValorizacion 1Wendor IparraguirreNessuna valutazione finora
- Datos Tecnicos de TransformadoresDocumento2 pagineDatos Tecnicos de TransformadoresMario Juarez Montiel0% (1)
- Ampollas en El ConcretoDocumento7 pagineAmpollas en El ConcretoAlbany D EliasNessuna valutazione finora
- Clasificacion Por Tama o de Los PecesDocumento16 pagineClasificacion Por Tama o de Los PecesEnioNessuna valutazione finora
- Tuberia de PVCDocumento19 pagineTuberia de PVCJuan Ernesto Alonso CastellanosNessuna valutazione finora