Potrebbero piacerti anche
- Balance Hidrológico Climático Thornthwaite 1948Documento19 pagineBalance Hidrológico Climático Thornthwaite 1948ElmenGarciaNessuna valutazione finora
- Metododedesplazamiento 180715075104Documento63 pagineMetododedesplazamiento 180715075104Ronal Calvo Santa CruzNessuna valutazione finora
- Estructura puente con dimensiones y estribajeDocumento3 pagineEstructura puente con dimensiones y estribajeEddie Manuel Panta RamirezNessuna valutazione finora
- Certificado de TrabajoDocumento2 pagineCertificado de TrabajoCherry VelasquezNessuna valutazione finora
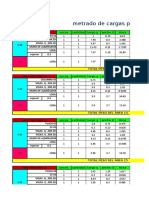
- Metrado de CargasDocumento10 pagineMetrado de CargasRubén Robles MendozaNessuna valutazione finora
- Metrados COMPLETOS EN EXCELDocumento177 pagineMetrados COMPLETOS EN EXCELEdilzon Pacompia FloresNessuna valutazione finora
- Espectro de DiseñoDocumento5 pagineEspectro de Diseñojulio garciaNessuna valutazione finora
- Transformacion de Deformación UnitariaDocumento8 pagineTransformacion de Deformación UnitariaLizbeth GarciaNessuna valutazione finora
- Programa para Diseño EscaleraDocumento9 paginePrograma para Diseño EscaleraRandy DíazNessuna valutazione finora
- Sismica Expositor 21Documento54 pagineSismica Expositor 21Patricio Cruz CruzNessuna valutazione finora
- Predimensionamiento de Elementos EstructuralesDocumento12 paginePredimensionamiento de Elementos EstructuralesWerner Moscoso HuarachaNessuna valutazione finora
- Costos y Presupuestos Clase 3Documento114 pagineCostos y Presupuestos Clase 3Te Lo Vendo TrujilloNessuna valutazione finora
- Modelo de Memoria de CalculoDocumento18 pagineModelo de Memoria de CalculoDREWNessuna valutazione finora
- Calculos HuayoDocumento67 pagineCalculos HuayoDiego NecasNessuna valutazione finora
- Flete de InsumosDocumento4 pagineFlete de InsumosAldo Suárez ContrerasNessuna valutazione finora
- Partidas de MetradosDocumento4 paginePartidas de MetradosFritz Quinteros RengifoNessuna valutazione finora
- Diseño Cunetas y AlcantarillasDocumento12 pagineDiseño Cunetas y AlcantarillasJorge Armando Arevalo BartraNessuna valutazione finora
- Diseño de Puente - Grupo 3Documento17 pagineDiseño de Puente - Grupo 3Rodrigo FernandezNessuna valutazione finora
- Piso 3Documento10 paginePiso 3Alejandro José AGUILAR MAMANINessuna valutazione finora
- Diseno Puente Tipo Losa Metodo LRFDDocumento19 pagineDiseno Puente Tipo Losa Metodo LRFDAni ArotomaNessuna valutazione finora
- Hidraulica de Canales Challliguaya CorregidoDocumento6 pagineHidraulica de Canales Challliguaya Corregidojesus joseNessuna valutazione finora
- Densidad de Muros Lixmath Pc3bablicoDocumento7 pagineDensidad de Muros Lixmath Pc3bablicoCesar Enrique Gutierrez Pacheco100% (1)
- Metrado de Cargas EDIFICIO 10 PISOSDocumento60 pagineMetrado de Cargas EDIFICIO 10 PISOShilter isaacNessuna valutazione finora
- Calculo de Ladrillos JCLDocumento52 pagineCalculo de Ladrillos JCLLuis DuarteNessuna valutazione finora
- 02 Memoria Descriptiva PDFDocumento11 pagine02 Memoria Descriptiva PDFJulio Ravelo GuzmanNessuna valutazione finora
- Actividad Practica Excel Basico L2Documento16 pagineActividad Practica Excel Basico L2Derly OrtizNessuna valutazione finora
- Análisis Sísmico - Estructura de Concreto Armado - Norma E.030 - Edificación de 05 PisosDocumento180 pagineAnálisis Sísmico - Estructura de Concreto Armado - Norma E.030 - Edificación de 05 PisosRicardo Efrain Condori MamaniNessuna valutazione finora
- ZapataDocumento77 pagineZapataAngel Vidal Dimaria Peralta RicraNessuna valutazione finora
- Estribos en ColumnasDocumento9 pagineEstribos en ColumnasmrnicusNessuna valutazione finora
- Diagrama de ParetoDocumento11 pagineDiagrama de ParetoJohannaNessuna valutazione finora
- Calculo de Dotacion de AguaDocumento2 pagineCalculo de Dotacion de AguabrayanliamNessuna valutazione finora
- Parametros de Diseño Deometrico-Tesis - Ok..No ImprimDocumento66 pagineParametros de Diseño Deometrico-Tesis - Ok..No ImprimAlexander Martinez TigreNessuna valutazione finora
- Diseño estructural sísmico UNDACDocumento22 pagineDiseño estructural sísmico UNDACCesar Alejandro Olazo VillenaNessuna valutazione finora
- Predimensionamiento de La EdificacionDocumento119 paginePredimensionamiento de La EdificacionJhon Elvis VeraNessuna valutazione finora
- Hidrograma de La TormentaDocumento9 pagineHidrograma de La TormentaAntuane FloresNessuna valutazione finora
- Diseño Vigas ObsDocumento458 pagineDiseño Vigas ObsFrank ZualNessuna valutazione finora
- Iteracion de ColumnasDocumento33 pagineIteracion de Columnascoronel camino ramiroNessuna valutazione finora
- Orificios de descarga libre: coeficientes y pérdidas de energíaDocumento11 pagineOrificios de descarga libre: coeficientes y pérdidas de energíaFabian Cutta MorenoNessuna valutazione finora
- Memoria de Cálculo Estructural Residencial Mariana 2 - Punta NegraDocumento36 pagineMemoria de Cálculo Estructural Residencial Mariana 2 - Punta NegraMauricio Cail MoralesNessuna valutazione finora
- Laboratorio #3Documento7 pagineLaboratorio #3Victor A. Figueroa MarcosNessuna valutazione finora
- Memoria de Calculo Colegio Victor Raul Haya de La TorreDocumento20 pagineMemoria de Calculo Colegio Victor Raul Haya de La TorreDiegoCastilloNessuna valutazione finora
- Platin ADocumento2 paginePlatin AAmerico Flores Bustamante100% (1)
- Armado de VigasDocumento37 pagineArmado de VigasCristian JosueNessuna valutazione finora
- Diseño de vigas para cálculo de costesDocumento3 pagineDiseño de vigas para cálculo de costesAlfredo Andrés Mamani FloresNessuna valutazione finora
- Diseño de ColumnaDocumento12 pagineDiseño de ColumnaAlfredo Misaico HuamanculiNessuna valutazione finora
- DISEÑODocumento130 pagineDISEÑOJoseCruzArrietaNessuna valutazione finora
- Análisis sísmico de edificio de concretoDocumento192 pagineAnálisis sísmico de edificio de concretoRicardo Efrain Condori MamaniNessuna valutazione finora
- Diseño PTAR CarazDocumento5 pagineDiseño PTAR CarazJenny Ebenith Alvarez LoliNessuna valutazione finora
- Hoja de Calculo Zapata Con Momento CASO 1Documento2 pagineHoja de Calculo Zapata Con Momento CASO 1eduardo vargasNessuna valutazione finora
- Ordenamiento TerritorialDocumento80 pagineOrdenamiento TerritorialKarinaCastilloNessuna valutazione finora
- Identificación de Daños Estructurales Provocados Por Los Sismos.Documento26 pagineIdentificación de Daños Estructurales Provocados Por Los Sismos.Alem BlasNessuna valutazione finora
- 002 Predimensionamiento de ColumnasDocumento6 pagine002 Predimensionamiento de ColumnasCarmen Mendoza100% (1)
- Diagnostico Lesiones Guadua PDFDocumento176 pagineDiagnostico Lesiones Guadua PDFlilianaNessuna valutazione finora
- 2.diseño de Zapata CombinadaDocumento20 pagine2.diseño de Zapata CombinadaRuelenen QuelenlonNessuna valutazione finora
- Tema2 DeformacionesDocumento17 pagineTema2 Deformacionesatzamora100% (9)
- Practica de Laboratorio de Fisica Mecanica IDocumento31 paginePractica de Laboratorio de Fisica Mecanica IArturo ToribioNessuna valutazione finora
- LevantamientosTopograficosTeodolitoDocumento10 pagineLevantamientosTopograficosTeodolitoDanielLeMuzzNessuna valutazione finora
- Diseño Por FlexionDocumento24 pagineDiseño Por FlexionMigue Gomez VazquezNessuna valutazione finora
- ParabolaDocumento5 pagineParabolasueco4933Nessuna valutazione finora
- Tratado de las secciones cónicas: la parábolaDa EverandTratado de las secciones cónicas: la parábolaNessuna valutazione finora
- Guia de La Energia Geotermica (Dtor Gral Minas CAM)Documento178 pagineGuia de La Energia Geotermica (Dtor Gral Minas CAM)ADGARCIAGARCIA100% (1)
- Informe Anual de AT en España 2014Documento32 pagineInforme Anual de AT en España 2014Pelayo RodrigoNessuna valutazione finora
- Estructuras Cristalinas CeramicasDocumento2 pagineEstructuras Cristalinas CeramicasPelayo RodrigoNessuna valutazione finora
- Tema 03 - LocalizaciónDocumento53 pagineTema 03 - LocalizaciónPelayo RodrigoNessuna valutazione finora
- Pres-Metodos Parte1 1415 BynDocumento66 paginePres-Metodos Parte1 1415 BynPelayo RodrigoNessuna valutazione finora
- La Estrategia Española de Seguridad y Salud en El Trabajo 2015-2020Documento4 pagineLa Estrategia Española de Seguridad y Salud en El Trabajo 2015-2020Pelayo RodrigoNessuna valutazione finora
- Cype 3 DDocumento44 pagineCype 3 DOvidiu FloreaNessuna valutazione finora
- Energía NuclearDocumento51 pagineEnergía NuclearPelayo RodrigoNessuna valutazione finora
- Estimacion de DinamicasDocumento21 pagineEstimacion de DinamicasPelayo RodrigoNessuna valutazione finora
- Tema 0-Sistemas TrifásicosDocumento10 pagineTema 0-Sistemas TrifásicosPelayo RodrigoNessuna valutazione finora
- Energía HidraulicaDocumento35 pagineEnergía HidraulicaPelayo RodrigoNessuna valutazione finora
- Problemas Tema2Documento8 pagineProblemas Tema2Pelayo RodrigoNessuna valutazione finora
- ControladoresDocumento54 pagineControladoresPelayo RodrigoNessuna valutazione finora
- Sistemas de Control RetroalimentadoDocumento24 pagineSistemas de Control RetroalimentadoPelayo RodrigoNessuna valutazione finora
- Proyecto de Diseño y Cálculo de Centro de Transformación en Punta PDFDocumento304 pagineProyecto de Diseño y Cálculo de Centro de Transformación en Punta PDFPelayo RodrigoNessuna valutazione finora
- Tema 2 - El ProcesadorDocumento15 pagineTema 2 - El ProcesadorAshley Stronghold WitwickyNessuna valutazione finora
- Proyecto Red Subterranea de BTDocumento188 pagineProyecto Red Subterranea de BTMicheal ChavezNessuna valutazione finora
- Feb 2003Documento6 pagineFeb 2003Pelayo RodrigoNessuna valutazione finora
- 5° - Directorio Telefónico DocenteDocumento2 pagine5° - Directorio Telefónico DocenteFiorella LazoNessuna valutazione finora
- Estadistica Laboratorio 2Documento3 pagineEstadistica Laboratorio 2Felipe JaimesNessuna valutazione finora
- Lab de Electronica P1Documento9 pagineLab de Electronica P1Jose Luis Cortez VillaoNessuna valutazione finora
- Levantamiento Con Brújula y CintaDocumento11 pagineLevantamiento Con Brújula y CintaGustavo ReyesNessuna valutazione finora
- Los 6 Principios Del Océano AzulDocumento5 pagineLos 6 Principios Del Océano Azulpiero0% (1)
- Metodologia Manual ProcedimientosDocumento27 pagineMetodologia Manual ProcedimientosJuan Pablo GamboaNessuna valutazione finora
- Ventiladores SiemensDocumento8 pagineVentiladores SiemensLEONARDOPARRA67% (3)
- Huesos Frescos PDFDocumento42 pagineHuesos Frescos PDFGonzalo MunNessuna valutazione finora
- Folleto Siee Nuevo Enero 26-2024Documento2 pagineFolleto Siee Nuevo Enero 26-2024nicorob032912Nessuna valutazione finora
- 7Documento2 pagine7sailordeadNessuna valutazione finora
- Brazo Robot SCARA Vision Artificial UpiicsaDocumento10 pagineBrazo Robot SCARA Vision Artificial UpiicsaocobotNessuna valutazione finora
- Ceplan y SinaplanDocumento7 pagineCeplan y SinaplanKarli Rojas Sanchez100% (2)
- Determinación de la torsión de hilosDocumento9 pagineDeterminación de la torsión de hilosjonathan10040Nessuna valutazione finora
- Microsoft PowerPoint - PRESENTACION BRIGADA de EMERGENCIAS - Copia (Modo de Compatibilidad)Documento14 pagineMicrosoft PowerPoint - PRESENTACION BRIGADA de EMERGENCIAS - Copia (Modo de Compatibilidad)wilmer_castillo_rNessuna valutazione finora
- Aportes de Mary Parker Follet a la gerencia participativaDocumento4 pagineAportes de Mary Parker Follet a la gerencia participativaConsultoría Facultad de Comunicaciones y Filología Universidad de AntioquiaNessuna valutazione finora
- Modelos Basados en Viajes o Modelos de 4 PasosDocumento2 pagineModelos Basados en Viajes o Modelos de 4 PasosAlexandra Oñate100% (3)
- El SustantivoDocumento18 pagineEl SustantivoMaryorit ValenNessuna valutazione finora
- Resume de manera concisa el tema central del documento, que es la denuncia realizada por Gremco por presunta competencia desleal del Estadio San Marcos de la Universidad Nacional Mayor de San MarcosDocumento6 pagineResume de manera concisa el tema central del documento, que es la denuncia realizada por Gremco por presunta competencia desleal del Estadio San Marcos de la Universidad Nacional Mayor de San MarcosincaguideNessuna valutazione finora
- Dips Tutorial Parte 04Documento8 pagineDips Tutorial Parte 04reymerNessuna valutazione finora
- Codigo Civil Comentado Derecho de ObligacionesDocumento660 pagineCodigo Civil Comentado Derecho de ObligacionesjuliortiNessuna valutazione finora
- Cuestionario FinalDocumento12 pagineCuestionario FinalRodrigo LFNessuna valutazione finora
- Previo 7Documento11 paginePrevio 7Rodrigo Vargas CaluaNessuna valutazione finora
- PRONAREADocumento15 paginePRONAREAGisela SchiavaNessuna valutazione finora
- Antropología OKDocumento8 pagineAntropología OKGester Tafur RojasNessuna valutazione finora
- Juego, Deporte y SociedadDocumento53 pagineJuego, Deporte y SociedadVevi Do100% (1)
- Analisis Del LugarDocumento2 pagineAnalisis Del LugarJessica EstefaníaNessuna valutazione finora
- Funciones+Cap +4-+límite+y+continuidad+puntual+ (v2)Documento9 pagineFunciones+Cap +4-+límite+y+continuidad+puntual+ (v2)belshyshyshy27Nessuna valutazione finora
- (PC) Representaciones Sociales - Indiana VallejosDocumento8 pagine(PC) Representaciones Sociales - Indiana VallejosMagda OrtegaNessuna valutazione finora
- Taller I Guerra MundialDocumento3 pagineTaller I Guerra MundialJulian Andres AgudeloNessuna valutazione finora
- Resumen Teoría de La SexualidadDocumento2 pagineResumen Teoría de La SexualidadCarlos HernándezNessuna valutazione finora