Potrebbero piacerti anche
- Laboratorio Ley de Hooke-P1Documento4 pagineLaboratorio Ley de Hooke-P1Alejandro Gonzalez AlarconNessuna valutazione finora
- EJ 3-5 LoganDocumento12 pagineEJ 3-5 LoganJose MenaNessuna valutazione finora
- LAB 2 RELACIÓN ENTRE T Y MDocumento3 pagineLAB 2 RELACIÓN ENTRE T Y MGeraldine CamargoNessuna valutazione finora
- Parámetros Denavit-HartenbergDocumento4 pagineParámetros Denavit-HartenbergCuenta FakeNessuna valutazione finora
- Labo 1 TraccionDocumento13 pagineLabo 1 TraccionMANUEL ALONSO QUISPE TICONANessuna valutazione finora
- Práctica 11 y 12Documento7 paginePráctica 11 y 12Vane PovedaNessuna valutazione finora
- Cálculo de utilidad y ganancia máxima de funciones cuadráticasDocumento3 pagineCálculo de utilidad y ganancia máxima de funciones cuadráticasrogelio barruetaNessuna valutazione finora
- PlacasDocumento10 paginePlacasEsther Marilu Villano CamarenaNessuna valutazione finora
- WC31 MA466 L3 Espinoza Ortega JoFETDocumento4 pagineWC31 MA466 L3 Espinoza Ortega JoFETjofet espinoza ortegaNessuna valutazione finora
- IG41 - MA466 - L1 - Quispe HuallpaDocumento3 pagineIG41 - MA466 - L1 - Quispe HuallpaGuillermo Quispe HuallpaNessuna valutazione finora
- Tarea Anchatuña Martinez Manobanda Tisalema Yunapanta-Zapata-1Documento11 pagineTarea Anchatuña Martinez Manobanda Tisalema Yunapanta-Zapata-1Paul ZapataNessuna valutazione finora
- Momento de inercia laboratorio Física 1 (CE88Documento3 pagineMomento de inercia laboratorio Física 1 (CE88Raul JGarayNessuna valutazione finora
- Laboratorio Movimiento OndulatorioDocumento5 pagineLaboratorio Movimiento OndulatorioBrayan AnguloNessuna valutazione finora
- Exp. - #2 - Ley de Hooke y Cambios de Energía Potencial - FI - V 01-CGT Módulo IDocumento6 pagineExp. - #2 - Ley de Hooke y Cambios de Energía Potencial - FI - V 01-CGT Módulo IWrych YauNessuna valutazione finora
- Solucionario Del Examen ParcialDocumento10 pagineSolucionario Del Examen ParcialAgustin MogrovejoNessuna valutazione finora
- TallernFuncionnLineal 915ed1ff084bee0Documento11 pagineTallernFuncionnLineal 915ed1ff084bee0HERNAN FELIPE CERON ARAMBURO100% (1)
- Deformaciones y Esfuerzos - Vigas IsostáticasDocumento17 pagineDeformaciones y Esfuerzos - Vigas IsostáticasAnonymous bqktULniNessuna valutazione finora
- Ejemplo de Tension PlanaDocumento21 pagineEjemplo de Tension Planajrcq9022Nessuna valutazione finora
- Solucionario de Examen Parcial 3 CI 313Documento2 pagineSolucionario de Examen Parcial 3 CI 313Diego CuizaNessuna valutazione finora
- p44c Ce88 l2 FernandezDocumento6 paginep44c Ce88 l2 FernandezPaul Astoquillca AguilarNessuna valutazione finora
- R P6 L8 Abreo Quintero ZarazaDocumento9 pagineR P6 L8 Abreo Quintero ZarazaJulian Arturo Beltran GarciaNessuna valutazione finora
- Lab Fis I MRUVDocumento7 pagineLab Fis I MRUVvinicioguamanNessuna valutazione finora
- Acetona MetanolDocumento3 pagineAcetona MetanolJHONY RENE PACHACUTI APAZANessuna valutazione finora
- Parcial 2Documento28 pagineParcial 2SantiagoCalderónReyesNessuna valutazione finora
- Notas Análisis de EstructurasDocumento26 pagineNotas Análisis de EstructurasAdriana MolinaNessuna valutazione finora
- Galvanometro TangenteDocumento4 pagineGalvanometro TangenteManzaneda AdrianNessuna valutazione finora
- Inercia rotacional: Laboratorio 5 de Física IDocumento3 pagineInercia rotacional: Laboratorio 5 de Física IFray Fl H. FigueroaNessuna valutazione finora
- Ley de Looke y Movimiento Oscilatorio InformeDocumento7 pagineLey de Looke y Movimiento Oscilatorio InformePEÑA MORALES PATRICK ALEJANDRONessuna valutazione finora
- Reporte Movimiento Armónico Simple Grupo 8Documento8 pagineReporte Movimiento Armónico Simple Grupo 8Araceli ZumaetaNessuna valutazione finora
- Desarrollo Del Reporte: Corresponde:: T (S) X (M) V (M/S)Documento2 pagineDesarrollo Del Reporte: Corresponde:: T (S) X (M) V (M/S)Rene LeeNessuna valutazione finora
- 21-1 Labo1 Pa EntregarDocumento11 pagine21-1 Labo1 Pa EntregarNicolas RodriguezNessuna valutazione finora
- Paso1 VictorJimenezDocumento18 paginePaso1 VictorJimenezvimaji89Nessuna valutazione finora
- Analisis de Datos 2Documento16 pagineAnalisis de Datos 2Dorian CondeNessuna valutazione finora
- Ejercicios 5Documento7 pagineEjercicios 5Anonymous 666Nessuna valutazione finora
- GV32 MA466 L1 Chimayco ManyariDocumento2 pagineGV32 MA466 L1 Chimayco ManyariGabriela ChimaycoNessuna valutazione finora
- Microondas RaquelDocumento5 pagineMicroondas RaquelChayo Toriz100% (4)
- Laboratorio Informe Interpretacion Graficas1.1Documento12 pagineLaboratorio Informe Interpretacion Graficas1.1Brayan BolivarNessuna valutazione finora
- Informe de Laboratorio5Documento8 pagineInforme de Laboratorio5NAYELI DIRROSS MARTINEZ NUNTONNessuna valutazione finora
- Trabajo Fase II - Narbona JeanpieroDocumento5 pagineTrabajo Fase II - Narbona JeanpieroJeanpiero Narbona VilchezNessuna valutazione finora
- Ejercicios MatricialesDocumento21 pagineEjercicios MatricialesUziel HanccoNessuna valutazione finora
- T7 AntisismicaDocumento9 pagineT7 AntisismicaFERNANDO COUTTSNessuna valutazione finora
- Labo 1Documento6 pagineLabo 1Flavio SaavedraNessuna valutazione finora
- Documento Fisica II pt7Documento21 pagineDocumento Fisica II pt7Randy GrullonNessuna valutazione finora
- MRUV carrito física laboratorioDocumento3 pagineMRUV carrito física laboratorioBrayan AtiroNessuna valutazione finora
- Tarea 2-DefinitivaDocumento17 pagineTarea 2-DefinitivaalejoNessuna valutazione finora
- Ejercicios EstáticaDocumento9 pagineEjercicios Estáticaalex oaNessuna valutazione finora
- Formulario RobotDocumento11 pagineFormulario RobotDaniel VazquezNessuna valutazione finora
- Ejercicio de Cinetica Tabla 2Documento1 paginaEjercicio de Cinetica Tabla 2SnikeNessuna valutazione finora
- Ejercicio de Cinetica Tabla 2Documento1 paginaEjercicio de Cinetica Tabla 2SnikeNessuna valutazione finora
- Ejercicio de Cinetica Tabla 2Documento1 paginaEjercicio de Cinetica Tabla 2SnikeNessuna valutazione finora
- IG42 - MA466 - L10 - Rivera, Principe, Ramos, PonceDocumento3 pagineIG42 - MA466 - L10 - Rivera, Principe, Ramos, PoncePamela Rivera contrerasNessuna valutazione finora
- Solucion Taller Vigas TDocumento5 pagineSolucion Taller Vigas TRonald CelinNessuna valutazione finora
- Práctica1. Manejo Del Multímetro Digital en Mediciones EléctricasDocumento7 paginePráctica1. Manejo Del Multímetro Digital en Mediciones EléctricasJANE BARAJASNessuna valutazione finora
- Trabajo CertamenN°3 Farias - AlvarezDocumento7 pagineTrabajo CertamenN°3 Farias - AlvarezDiego Andres Alvarez EstayNessuna valutazione finora
- Laboratorio 1 - Angie Bautista, Karen Pajarito, Milena LesmesDocumento16 pagineLaboratorio 1 - Angie Bautista, Karen Pajarito, Milena LesmesLaura RiveraNessuna valutazione finora
- 4.-Tarea Académica N4 G1 PDFDocumento10 pagine4.-Tarea Académica N4 G1 PDFAnaliz S. Acosta AlvinoNessuna valutazione finora
- Instituto Politécnico Nacional: Escuela Nacional de Ciencias BiológicasDocumento9 pagineInstituto Politécnico Nacional: Escuela Nacional de Ciencias BiológicasJavier AnguianoNessuna valutazione finora
- Mc516 A - Segundo LaboratorioDocumento19 pagineMc516 A - Segundo LaboratorioJoel JBNessuna valutazione finora
- Métodos Matriciales para ingenieros con MATLABDa EverandMétodos Matriciales para ingenieros con MATLABValutazione: 5 su 5 stelle5/5 (1)
- R 8020Documento4 pagineR 8020Angel VazquezNessuna valutazione finora
- Capitulo I - WordDocumento4 pagineCapitulo I - WordLuis Javier AvilaNessuna valutazione finora
- Capitulo I - WordDocumento4 pagineCapitulo I - WordLuis Javier AvilaNessuna valutazione finora
- 2 LogicaDocumento14 pagine2 LogicaLuis Javier AvilaNessuna valutazione finora
- Problemas Semana 06Documento6 pagineProblemas Semana 06pickle rickNessuna valutazione finora
- ACABADOSDocumento10 pagineACABADOSJhon Arreaga AguilarNessuna valutazione finora
- Protector Gástrico RanitidinaDocumento4 pagineProtector Gástrico RanitidinaleydisNessuna valutazione finora
- T.e.-Geologia EstructuralDocumento23 pagineT.e.-Geologia EstructuralEduardo MeraNessuna valutazione finora
- Maltrato y Abandono Hacia El Adulto Mayor DesarrolloDocumento29 pagineMaltrato y Abandono Hacia El Adulto Mayor DesarrolloMoises Pacotaipe CabanaNessuna valutazione finora
- Geolocalización en la gestión de recursos humanosDocumento5 pagineGeolocalización en la gestión de recursos humanosroca tolaNessuna valutazione finora
- Especificaciones TecnicasDocumento95 pagineEspecificaciones TecnicasSteffi YangaliNessuna valutazione finora
- Guia para Elaborar Un Portafolio Cientifico 2020Documento4 pagineGuia para Elaborar Un Portafolio Cientifico 2020Jonathan BenitezNessuna valutazione finora
- Manual para El Apoyo y Seguimiento Del Desarrollo Psicosocial de Los Ninos y Ninas de 0 A 6 Anos 2008Documento102 pagineManual para El Apoyo y Seguimiento Del Desarrollo Psicosocial de Los Ninos y Ninas de 0 A 6 Anos 2008Daniela Hurtado G.Nessuna valutazione finora
- Impermeabilizante acrílico elástico SikaFill 10Documento3 pagineImpermeabilizante acrílico elástico SikaFill 10LoperacoNessuna valutazione finora
- Clase 3 - TanatocronodiagnósticoDocumento4 pagineClase 3 - TanatocronodiagnósticoIngrid del valleNessuna valutazione finora
- Ficha Tecnica Dioxido de SilicioDocumento2 pagineFicha Tecnica Dioxido de SilicioCeba San Agustín100% (1)
- Inmunizaciones en Tiempo de CovidDocumento57 pagineInmunizaciones en Tiempo de Covidsara zavaleta cordovaNessuna valutazione finora
- De Procesos de Embotelladora Coca ColaDocumento11 pagineDe Procesos de Embotelladora Coca ColaEvelyn LucasNessuna valutazione finora
- Las Aplicaciones de La Presión OsmóticaDocumento8 pagineLas Aplicaciones de La Presión OsmóticaJuleysy ValenzuelaNessuna valutazione finora
- El Avivamiento Comienza en Casa 3Documento0 pagineEl Avivamiento Comienza en Casa 3dalenielriveraNessuna valutazione finora
- Plan de MantenimientoDocumento61 paginePlan de MantenimientoEnder CabreraNessuna valutazione finora
- Reporte Tipos de SueloDocumento2 pagineReporte Tipos de SueloAbisail Peralta100% (3)
- Primeros Auxilios para Brigadista LincunaDocumento95 paginePrimeros Auxilios para Brigadista LincunaEver Polo RodríguezNessuna valutazione finora
- Pc1-Ejercicios de Clase ResueltosDocumento14 paginePc1-Ejercicios de Clase ResueltosJhordy Maycol Rodas QuirozNessuna valutazione finora
- Profecia de Los Indios America NosDocumento16 pagineProfecia de Los Indios America NosCindy E. JonesNessuna valutazione finora
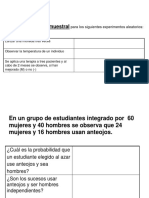
- Taller de Probabilidades AlumnosDocumento9 pagineTaller de Probabilidades AlumnosMISOL GALLEGUILLOS CALLEJASNessuna valutazione finora
- Cálculo Manual de Corriente de CortocircuitoDocumento9 pagineCálculo Manual de Corriente de Cortocircuitoisjavg_jesusNessuna valutazione finora
- Formación de cristales de azúcarDocumento5 pagineFormación de cristales de azúcarPAULA DANIELA QUINONES REALPENessuna valutazione finora
- Cuida tu medio ambienteDocumento7 pagineCuida tu medio ambienteJairo Arrieta ArrietaNessuna valutazione finora
- Resumen de Elementos de La Ecologia y SubsistemasDocumento10 pagineResumen de Elementos de La Ecologia y SubsistemasJuan JoseNessuna valutazione finora
- Antivomitivos para PerrosDocumento2 pagineAntivomitivos para PerrosStephanie CaseNessuna valutazione finora
- 03 NEXANS CB-XT-MB02 18-30 KV 400-142 mm2 IEC 60502-2Documento1 pagina03 NEXANS CB-XT-MB02 18-30 KV 400-142 mm2 IEC 60502-2victornoesgrunfeldNessuna valutazione finora
- Tipos de PetroleoDocumento5 pagineTipos de PetroleoNeify Robles HernandezNessuna valutazione finora
- Objetivos Terminales Emat4Documento1 paginaObjetivos Terminales Emat4SoniaNessuna valutazione finora