Potrebbero piacerti anche
- Laboratorio #1-Transferencia de CalorDocumento16 pagineLaboratorio #1-Transferencia de CalorFranco GionoNessuna valutazione finora
- Laboratorio #1-Transferencia de CalorDocumento16 pagineLaboratorio #1-Transferencia de CalorFranco GionoNessuna valutazione finora
- Gatos Eran Los de Antes PDFDocumento17 pagineGatos Eran Los de Antes PDFSoledad ZanninoNessuna valutazione finora
- Problemas de Matematica GeneralDocumento17 pagineProblemas de Matematica GeneralFranco GionoNessuna valutazione finora
- Ecuaciones Importantes de TermodinamicaDocumento3 pagineEcuaciones Importantes de TermodinamicaFranco GionoNessuna valutazione finora
- InformeDocumento9 pagineInformeFranco GionoNessuna valutazione finora
- Laboratorio #1 Dinámica AplicadaDocumento7 pagineLaboratorio #1 Dinámica AplicadaFranco GionoNessuna valutazione finora
- Tablas y Graficas Ciencias 2Documento5 pagineTablas y Graficas Ciencias 2Franco GionoNessuna valutazione finora
- Laboratorio #1 Dinámica AplicadaDocumento7 pagineLaboratorio #1 Dinámica AplicadaFranco GionoNessuna valutazione finora
- Tablas y Graficas Ciencias 2Documento5 pagineTablas y Graficas Ciencias 2Franco GionoNessuna valutazione finora
- Laboratorio 4 Ciencias 2Documento10 pagineLaboratorio 4 Ciencias 2Franco GionoNessuna valutazione finora
- Tablas de SemestralDocumento3 pagineTablas de SemestralFranco GionoNessuna valutazione finora
- Datos de Dinámica AplicadaDocumento1 paginaDatos de Dinámica AplicadaFranco GionoNessuna valutazione finora
- Lab2 Dinamica AplicadaDocumento7 pagineLab2 Dinamica AplicadaVicente GonzálezNessuna valutazione finora
- Lab1 Electrónica PotenciaDocumento8 pagineLab1 Electrónica PotenciaFranco GionoNessuna valutazione finora
- Dinámica Aplicada: Demostración de Problemas de Vibraciones MecánicasDocumento1 paginaDinámica Aplicada: Demostración de Problemas de Vibraciones MecánicasFranco GionoNessuna valutazione finora
- Tarea #2 Dinamica AplicadaDocumento1 paginaTarea #2 Dinamica AplicadaFranco GionoNessuna valutazione finora
- Asignacion #5Documento13 pagineAsignacion #5Franco GionoNessuna valutazione finora
- CharlaDocumento15 pagineCharlaFranco GionoNessuna valutazione finora
- Empresas de Transporte de ProductosDocumento1 paginaEmpresas de Transporte de ProductosFranco GionoNessuna valutazione finora
- Ecuación movimiento oscilador armónico simpleDocumento2 pagineEcuación movimiento oscilador armónico simpleFranco GionoNessuna valutazione finora
- La Historia de Lala Parte 5Documento1 paginaLa Historia de Lala Parte 5Franco GionoNessuna valutazione finora
- La Historia de Lala Parte 4Documento1 paginaLa Historia de Lala Parte 4Franco GionoNessuna valutazione finora
- La Historia Lala Parte 3Documento1 paginaLa Historia Lala Parte 3Franco GionoNessuna valutazione finora
- Guía 2 - Resp. Temporal, Lugar RaícesDocumento8 pagineGuía 2 - Resp. Temporal, Lugar RaícesOliver GonzalezNessuna valutazione finora
- Resultados Laboratorio #3 Transferencia de CalorDocumento8 pagineResultados Laboratorio #3 Transferencia de CalorFranco GionoNessuna valutazione finora
- Programación de MATLAB de Variables de Estado y Reducción de Diagramas de BloqueDocumento5 pagineProgramación de MATLAB de Variables de Estado y Reducción de Diagramas de BloqueFranco GionoNessuna valutazione finora
- Laboratorio #1 Corregido de Transferencia de CalorDocumento7 pagineLaboratorio #1 Corregido de Transferencia de CalorFranco GionoNessuna valutazione finora
- Diagramas de bloques y funciones de transferencia de sistemas de controlDocumento2 pagineDiagramas de bloques y funciones de transferencia de sistemas de controlmayfellNessuna valutazione finora
- Guia 2 FT, Ve y BloquesDocumento13 pagineGuia 2 FT, Ve y BloquesFranco GionoNessuna valutazione finora
- Diptongos Manual - REMEDocumento8 pagineDiptongos Manual - REMERaúl Emanuel Maldonado EstradaNessuna valutazione finora
- Guias Mat 4° BDocumento76 pagineGuias Mat 4° BVale FuentesNessuna valutazione finora
- El Valor Del Servicio Como Principio Fundamental en Una Administración AdventistaDocumento16 pagineEl Valor Del Servicio Como Principio Fundamental en Una Administración AdventistaIngrid ToribioNessuna valutazione finora
- Ejercicios Discurso Exposiivo SegundoDocumento2 pagineEjercicios Discurso Exposiivo SegundoPequeña GiganteNessuna valutazione finora
- Filosofía MedievalDocumento14 pagineFilosofía MedievalJesús Salvador García CuéllarNessuna valutazione finora
- Guion Alicia Dos GuionesDocumento17 pagineGuion Alicia Dos GuionesCamila Krumpoeck VegaNessuna valutazione finora
- Comida y Danza de Las Cuatro Culturas de GuatemalaDocumento3 pagineComida y Danza de Las Cuatro Culturas de GuatemalaPERSIDA VICTORIA HERNANDEZ CURIALES100% (3)
- 11-05-2020 Guía de Lengua CastellanaDocumento3 pagine11-05-2020 Guía de Lengua CastellanaLore LeonNessuna valutazione finora
- Mo Üdulo de Aprendizaje Comunicacio Ün D.KDocumento154 pagineMo Üdulo de Aprendizaje Comunicacio Ün D.KDayana Alexandra Palomino AlbinesNessuna valutazione finora
- Cantata y OratoriaDocumento43 pagineCantata y OratoriaMichelleAngelo Pepe LinaresNessuna valutazione finora
- Importancia de la intención en los actos ilocucionariosDocumento4 pagineImportancia de la intención en los actos ilocucionariosDaniela Salinas CubillosNessuna valutazione finora
- Resumen de Introducción Al Pensamiento Científico CBCDocumento39 pagineResumen de Introducción Al Pensamiento Científico CBCyaminoe9di9garciaNessuna valutazione finora
- 2304 Accion de Gracia, Alabanza y AdoracionDocumento9 pagine2304 Accion de Gracia, Alabanza y AdoracionJean Scott OyarceNessuna valutazione finora
- Componentes de Un Acto ComunicativoDocumento11 pagineComponentes de Un Acto ComunicativoKevin Giraldo80% (5)
- Proyecto Cuento, Canto y Encanto 1Documento10 pagineProyecto Cuento, Canto y Encanto 1DAMIAN FAJARDO BALLADARES100% (1)
- Maquina Estado FinitoDocumento34 pagineMaquina Estado FinitoArielNessuna valutazione finora
- Cassany Cap. 2 Comprender La IdeologíaDocumento3 pagineCassany Cap. 2 Comprender La IdeologíaSergio Nicolás100% (1)
- Vida y TrascendenciaDocumento2 pagineVida y TrascendenciaJuan CarlosNessuna valutazione finora
- Las Profecías MesiánicasDocumento9 pagineLas Profecías MesiánicasJavier AndrésNessuna valutazione finora
- Microprocesadores IntelDocumento451 pagineMicroprocesadores Intelsescomre.servicio.tecnicoNessuna valutazione finora
- Ensayo Disc. Del DeficitDocumento8 pagineEnsayo Disc. Del Deficitmaney2012Nessuna valutazione finora
- Semiotica Del Grafitit)Documento10 pagineSemiotica Del Grafitit)Wendy D. AraujoNessuna valutazione finora
- Inscripciones SuperateDocumento7 pagineInscripciones Superatejuan0537Nessuna valutazione finora
- Beatriz Sarlo Imperio SentimientosDocumento14 pagineBeatriz Sarlo Imperio SentimientosCelina BaliertaNessuna valutazione finora
- Metodología para el desarrollo de aplicaciones móvilesDocumento17 pagineMetodología para el desarrollo de aplicaciones móvilesGuads UhNessuna valutazione finora
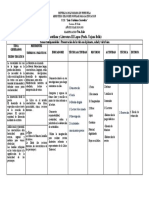
- Planificación 5to. Año Luis CárdenasDocumento1 paginaPlanificación 5to. Año Luis CárdenasGerar100% (2)
- Talleres de Oracion y VidaDocumento7 pagineTalleres de Oracion y VidaJose LuisNessuna valutazione finora
- Conectores LingüísticosDocumento3 pagineConectores LingüísticosNayla FernandezNessuna valutazione finora
- Estrategias para Mejorar La Práctica Docente - Jesús María Nieto Gil PDFDocumento327 pagineEstrategias para Mejorar La Práctica Docente - Jesús María Nieto Gil PDFCristian Manuel Fernandez SaldañaNessuna valutazione finora