Potrebbero piacerti anche
- Manual de Robomind ESPAÑOL PDFDocumento15 pagineManual de Robomind ESPAÑOL PDFInstitución Educativa Peruano SuizoNessuna valutazione finora
- Introducción A La Programación PDFDocumento14 pagineIntroducción A La Programación PDFLowiseNessuna valutazione finora
- Introducción A La Programación.Documento14 pagineIntroducción A La Programación.LowiseNessuna valutazione finora
- Tema 4 Control Programado Alumnos1 PDFDocumento17 pagineTema 4 Control Programado Alumnos1 PDFInstitución Educativa Peruano SuizoNessuna valutazione finora
- Metodos de Programacion de RobotsDocumento20 pagineMetodos de Programacion de RobotsDavid Shure XivNessuna valutazione finora
- Tema 4. Control Programado (Alumnos)Documento17 pagineTema 4. Control Programado (Alumnos)almarpaNessuna valutazione finora
- Man1 RobomindDocumento21 pagineMan1 RobomindMel TsantacruzNessuna valutazione finora
- Informe Expo - Programacion RobotsDocumento23 pagineInforme Expo - Programacion Robotste veo te veoNessuna valutazione finora
- 13-18 U2Documento6 pagine13-18 U2Carlos GodinezNessuna valutazione finora
- ProgramacionDocumento12 pagineProgramacionJohn GavilanezNessuna valutazione finora
- Resumen IntRob PXARDocumento5 pagineResumen IntRob PXARPaola AlvarezNessuna valutazione finora
- Robo DKDocumento7 pagineRobo DKMauricio De La Garza GonzalezNessuna valutazione finora
- Entorno de Programación de Robots Industriales U2Documento70 pagineEntorno de Programación de Robots Industriales U2bombon fabe100% (1)
- Act Int 12-02-22 RgaDocumento10 pagineAct Int 12-02-22 RgaRODRIGONessuna valutazione finora
- Manual de CosimirDocumento17 pagineManual de CosimirERICK MORALES100% (2)
- Reporte Simulacion 1Documento10 pagineReporte Simulacion 1Fernando Flores cruzNessuna valutazione finora
- Etapa 1Documento8 pagineEtapa 1Brian Eduardo González OrtizNessuna valutazione finora
- Resumen de CosimirDocumento7 pagineResumen de Cosimiryarethzy.barreratv21354Nessuna valutazione finora
- Resumen Unidad 3Documento5 pagineResumen Unidad 3Gabriela LlerenaNessuna valutazione finora
- 1 Programación de RobotsDocumento29 pagine1 Programación de RobotsMoraditoNessuna valutazione finora
- Fase 4Documento13 pagineFase 4Brucer Lee Roncallo100% (1)
- Guía Células de ManufacturaDocumento8 pagineGuía Células de ManufacturaAlberto RamirezNessuna valutazione finora
- Manual OpenRobertaDocumento22 pagineManual OpenRobertaadriana cuevasNessuna valutazione finora
- Guia Global IntRDocumento12 pagineGuia Global IntRKaren HVMNessuna valutazione finora
- LOPEZ AMBROSIO SALOMON ROBOTICA ReporteLecturaDocumento5 pagineLOPEZ AMBROSIO SALOMON ROBOTICA ReporteLecturasalomon ambrosioNessuna valutazione finora
- Practica 5Documento33 paginePractica 5sistemaelectricoNessuna valutazione finora
- Etapa 1 - Robótica - 2022Documento7 pagineEtapa 1 - Robótica - 2022Melanie ReynagaNessuna valutazione finora
- Programacion de RobotsDocumento43 pagineProgramacion de RobotsOMEGA LUL KAPPANessuna valutazione finora
- Guia de Robotica - Concurso - Robotikcond - 2022Documento32 pagineGuia de Robotica - Concurso - Robotikcond - 2022Joaquin Zuñiga HuayhuaNessuna valutazione finora
- Unidad 1 Saber 1PROGRAMACION DE ROBOTSDocumento17 pagineUnidad 1 Saber 1PROGRAMACION DE ROBOTSLUIS HUMBERTO DEL PRADO AGUIRRENessuna valutazione finora
- Brazo Robotico. Trabajo FinalDocumento13 pagineBrazo Robotico. Trabajo Finalxiniskbrera100% (1)
- Primaria 2021 Clase1Documento11 paginePrimaria 2021 Clase1Ma Ro Mejia GirónNessuna valutazione finora
- Manufactura FlexibleDocumento14 pagineManufactura FlexibleEddy ZacariasNessuna valutazione finora
- Programacion de Robots y LenguajesDocumento21 pagineProgramacion de Robots y LenguajesurielhdzNessuna valutazione finora
- ABB Core Training Sesion 3Documento13 pagineABB Core Training Sesion 3Luis Miguel Erazo LeivaNessuna valutazione finora
- Comandos Basicos IDocumento34 pagineComandos Basicos IFreddy Escorza100% (1)
- Equipo2 EV1 IntRobDocumento20 pagineEquipo2 EV1 IntRobSurii Shaday HVNessuna valutazione finora
- Segundo Reto Open RobertaDocumento14 pagineSegundo Reto Open Robertaleonardo montesNessuna valutazione finora
- Robótics ProgrammingDocumento9 pagineRobótics ProgrammingGuillermo MoranNessuna valutazione finora
- Robots FANUCDocumento51 pagineRobots FANUCRonaldo Marcos SoteloNessuna valutazione finora
- Lenguajes de Programacion de Un RobotDocumento6 pagineLenguajes de Programacion de Un RobotGabriel OrtizNessuna valutazione finora
- Programación Olp de FanucDocumento9 pagineProgramación Olp de FanucRoberto Carlos Quiñones GonzalezNessuna valutazione finora
- Paper RV-M1Documento5 paginePaper RV-M1dickforusNessuna valutazione finora
- GUI para Control y Monitoreo de Robot Mitsubishi RV3SBDocumento22 pagineGUI para Control y Monitoreo de Robot Mitsubishi RV3SBIsmael PortilloNessuna valutazione finora
- Avance2 420Documento19 pagineAvance2 420Alberto PuenteNessuna valutazione finora
- U3P4 Guerrero Ramirez Diego ReneDocumento5 pagineU3P4 Guerrero Ramirez Diego ReneQuesos HwNessuna valutazione finora
- Programacion de Robot de Coordenadas CartesianasDocumento9 pagineProgramacion de Robot de Coordenadas CartesianasIvan LopezNessuna valutazione finora
- Robot StudioDocumento93 pagineRobot Studiobrunozq100% (6)
- Robocell1 0Documento37 pagineRobocell1 0profesor.antonioamNessuna valutazione finora
- Reporte Practica 3 ColaborativoDocumento6 pagineReporte Practica 3 ColaborativoAngel RiveraNessuna valutazione finora
- Actividad 5Documento5 pagineActividad 5alfredoNessuna valutazione finora
- TR FinalDocumento11 pagineTR FinalcrtNessuna valutazione finora
- FANUC On DemandDocumento43 pagineFANUC On DemandAgeofsNessuna valutazione finora
- Manual de Usuario para Utilizar El Software RoboanalyzerDocumento11 pagineManual de Usuario para Utilizar El Software Roboanalyzerraziel sanchezNessuna valutazione finora
- Cosimir Tutorial en Esp A05v12n1Documento5 pagineCosimir Tutorial en Esp A05v12n1inanjaanpaNessuna valutazione finora
- Practica 1 ScorbotDocumento18 paginePractica 1 ScorbotDanielNessuna valutazione finora
- Actividad Sumativa 3Documento3 pagineActividad Sumativa 3Azul GonzálezNessuna valutazione finora
- Programación con lenguajes de guión en páginas web. IFCD0110Da EverandProgramación con lenguajes de guión en páginas web. IFCD0110Nessuna valutazione finora
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Da EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Nessuna valutazione finora
- Gerente Por Primera Vez 5ta EdicionDocumento231 pagineGerente Por Primera Vez 5ta EdicionVlady Vladyto71% (17)
- Ej Practico 10 ExcelDocumento1 paginaEj Practico 10 ExcelJorge CalvilloNessuna valutazione finora
- Manual Tecnologia EducativaDocumento24 pagineManual Tecnologia EducativaJorge CalvilloNessuna valutazione finora
- Politica y Legislacion InformaticaDocumento93 paginePolitica y Legislacion InformaticaJorge CalvilloNessuna valutazione finora
- Visual Basic Manual y Ejercicios )Documento38 pagineVisual Basic Manual y Ejercicios )Jorge CalvilloNessuna valutazione finora
- AristotelesDocumento30 pagineAristotelesJorge CalvilloNessuna valutazione finora
- Estudios de Los Elementos de La LogisticaDocumento18 pagineEstudios de Los Elementos de La Logisticawilliam RodriguezNessuna valutazione finora
- Cuál Es La Importancia de Conocer Los Requerimientos de SoftwareDocumento2 pagineCuál Es La Importancia de Conocer Los Requerimientos de Software17 Osmar Lisandro Figueroa CunayNessuna valutazione finora
- Qgis 2Documento217 pagineQgis 2Alvaro Dario Ramos TiradoNessuna valutazione finora
- Secme 18784Documento44 pagineSecme 18784Mike TeranNessuna valutazione finora
- Diagrama Lenguajes Programacion PLCDocumento3 pagineDiagrama Lenguajes Programacion PLCCatherine TrujilloNessuna valutazione finora
- Que Entiendes Por PolimorfismoDocumento2 pagineQue Entiendes Por PolimorfismoCelso VazquezNessuna valutazione finora
- Laboratorio 1 de Control Avanzado MT 229Documento15 pagineLaboratorio 1 de Control Avanzado MT 229corpses88Nessuna valutazione finora
- Lean - Management y Mejora ContinuaDocumento47 pagineLean - Management y Mejora ContinuaLIMA100% (2)
- Análisis de Caso 1 Desarrollo y Programación Orientada A Objetos Andrés MarínDocumento4 pagineAnálisis de Caso 1 Desarrollo y Programación Orientada A Objetos Andrés MarínAndrés MarínNessuna valutazione finora
- Gestión en Los Almacenes de Las Empresas (Centros de Distribución, CEDIS)Documento11 pagineGestión en Los Almacenes de Las Empresas (Centros de Distribución, CEDIS)Gino PajueloNessuna valutazione finora
- Aplicacionesmoviles 160209004Documento13 pagineAplicacionesmoviles 160209004luis carlos guevara matiasNessuna valutazione finora
- Plantilla Formato Ieee830Documento10 paginePlantilla Formato Ieee830MartaNessuna valutazione finora
- Raptor Como Entorno para Desarrollar Algoritmos de Arduino PDFDocumento6 pagineRaptor Como Entorno para Desarrollar Algoritmos de Arduino PDFSebastián RiañoNessuna valutazione finora
- AMEF - Línea AmarillaDocumento421 pagineAMEF - Línea AmarillaJeyson Minaya PantojaNessuna valutazione finora
- Actividades para Cumplimiento de PCI DSSDocumento8 pagineActividades para Cumplimiento de PCI DSSRey2000Nessuna valutazione finora
- Plan de Pruebas de SoftwareDocumento20 paginePlan de Pruebas de SoftwareHUGO CESAR CASANOVA DEL CASTILLONessuna valutazione finora
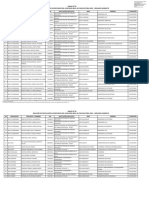
- Anexo N.°4 Relación de Postulantes Accesitarios PDFDocumento2 pagineAnexo N.°4 Relación de Postulantes Accesitarios PDFAntonio FlorezNessuna valutazione finora
- 1 Manual de Creación Una Aplicación Web Usando Flask en PythonDocumento42 pagine1 Manual de Creación Una Aplicación Web Usando Flask en PythonGlaf JimenezNessuna valutazione finora
- CLASE-16-altura ActivaDocumento37 pagineCLASE-16-altura Activaecoalejo100% (3)
- Separata 2Documento10 pagineSeparata 2stagi_10Nessuna valutazione finora
- Sistema Gestor de ComprasDocumento3 pagineSistema Gestor de ComprasAmos RodriguezNessuna valutazione finora
- PRACTICA 1 Fundaciones UTODocumento2 paginePRACTICA 1 Fundaciones UTOOscar Clinker SantanderNessuna valutazione finora
- LARAVELDocumento1 paginaLARAVELMilton Pacherrez NavarroNessuna valutazione finora
- Patrones de Diseño Por Capas: Mariana Garro Alonso. Autor, Estudiante UACA, IEEE (UACA, San José, Costa RicaDocumento4 paginePatrones de Diseño Por Capas: Mariana Garro Alonso. Autor, Estudiante UACA, IEEE (UACA, San José, Costa RicaMariana Garro AlonsoNessuna valutazione finora
- Cristian González Control 5Documento9 pagineCristian González Control 5CHARLES BARRAZANessuna valutazione finora
- Extension Uml para El Modelado de Mapas Navegacionales D e Aplicaciones Web Basado en Mda PDFDocumento183 pagineExtension Uml para El Modelado de Mapas Navegacionales D e Aplicaciones Web Basado en Mda PDFPedro MartinNessuna valutazione finora
- 04 Mysql Alter TableDocumento5 pagine04 Mysql Alter TableInes RodriguezNessuna valutazione finora
- 09a - Programacion Dinamica ProbabilisticaDocumento6 pagine09a - Programacion Dinamica ProbabilisticaCristhian Alonso TorresNessuna valutazione finora
- Tesis Jhordan Desarrollode Sistema de Ventas para Libreria..Documento73 pagineTesis Jhordan Desarrollode Sistema de Ventas para Libreria..Junior Rey Colome50% (2)
- 1 Actividad - Mapa Conceptual de UMLDocumento1 pagina1 Actividad - Mapa Conceptual de UMLJuan Pablo MartinezNessuna valutazione finora