Potrebbero piacerti anche
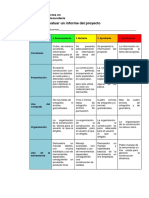
- Rúbricas Proyectos 2019Documento2 pagineRúbricas Proyectos 2019AndresJuanNessuna valutazione finora
- So Lucio Nario 20072Documento60 pagineSo Lucio Nario 20072HP_Paul100% (1)
- Ley Servir analiza régimen único empleo públicoDocumento10 pagineLey Servir analiza régimen único empleo públicoAndresJuanNessuna valutazione finora
- Desempeños 5to (B)Documento5 pagineDesempeños 5to (B)AndresJuanNessuna valutazione finora
- Competencias y Desempeños Fisica 5toDocumento2 pagineCompetencias y Desempeños Fisica 5toAndresJuanNessuna valutazione finora
- IV BIM - LIT - 4TO AÑO - Guia 4 - Gabriel García MarquezDocumento5 pagineIV BIM - LIT - 4TO AÑO - Guia 4 - Gabriel García MarquezRonal Tenorio CarranzaNessuna valutazione finora
- Modulo de TorsionDocumento4 pagineModulo de TorsionAndresJuanNessuna valutazione finora
- RompecabezasDocumento7 pagineRompecabezasAndresJuanNessuna valutazione finora
- Desempeños 5to (B)Documento5 pagineDesempeños 5to (B)AndresJuanNessuna valutazione finora
- PreUNAC - Biología Part 1 PDFDocumento135 paginePreUNAC - Biología Part 1 PDFAndresJuanNessuna valutazione finora
- Práctica FraccionesDocumento7 paginePráctica FraccionesAndresJuanNessuna valutazione finora
- CompetenciasDocumento2 pagineCompetenciasAndresJuanNessuna valutazione finora
- III BIM - QUIM - 3ER. AÑO - GUIA #3 - Unidades Químicas deDocumento4 pagineIII BIM - QUIM - 3ER. AÑO - GUIA #3 - Unidades Químicas deAndresJuanNessuna valutazione finora
- Entre Los Métodos de Evaluación de Desempeño Más Usados Se EncuentranDocumento2 pagineEntre Los Métodos de Evaluación de Desempeño Más Usados Se EncuentranAndresJuanNessuna valutazione finora
- Iii Bim - Leng - Guia Nº1 - La OracionDocumento7 pagineIii Bim - Leng - Guia Nº1 - La Oracionyoli_ch1645Nessuna valutazione finora
- Extension FraccionesDocumento9 pagineExtension FraccionesAndresJuanNessuna valutazione finora
- 3ero Examen FísicaDocumento7 pagine3ero Examen FísicaAndresJuanNessuna valutazione finora
- 4toexmmovimiento MecánicoDocumento5 pagine4toexmmovimiento MecánicoAndresJuanNessuna valutazione finora
- Final McuDocumento3 pagineFinal McuAndresJuanNessuna valutazione finora
- 5to Examen Virtual Preca 2018 IDocumento2 pagine5to Examen Virtual Preca 2018 IAndresJuanNessuna valutazione finora
- 7mo Virtual PrecaDocumento2 pagine7mo Virtual PrecaAndresJuanNessuna valutazione finora
- 4toexmmovimiento MecánicoDocumento5 pagine4toexmmovimiento MecánicoAndresJuanNessuna valutazione finora
- Sistemas de NumeracionDocumento1 paginaSistemas de NumeracionAndresJuanNessuna valutazione finora
- 4toexmmovimiento MecánicoDocumento5 pagine4toexmmovimiento MecánicoAndresJuanNessuna valutazione finora
- Ecuaciones y GeometriaDocumento2 pagineEcuaciones y GeometriaAndresJuanNessuna valutazione finora
- Ecuaciones de Primer Grado PDFDocumento2 pagineEcuaciones de Primer Grado PDFAndresJuanNessuna valutazione finora
- 4to Examen Virtual Precatolica IIDocumento2 pagine4to Examen Virtual Precatolica IIAndresJuanNessuna valutazione finora
- Ecuaciones de Primer GradoDocumento2 pagineEcuaciones de Primer GradoAndresJuanNessuna valutazione finora
- Practica EstaticaDocumento3 paginePractica EstaticaAndresJuanNessuna valutazione finora
- Final McuDocumento3 pagineFinal McuAndresJuanNessuna valutazione finora
- Coordenadas Cilíndricas TrabajoDocumento4 pagineCoordenadas Cilíndricas TrabajoEndry RodriguezNessuna valutazione finora
- Aplicaciones de Las Integrales Definidas en FísicaDocumento2 pagineAplicaciones de Las Integrales Definidas en FísicaErika RodriguezNessuna valutazione finora
- Características de las guías de onda rectangulares y circularesDocumento10 pagineCaracterísticas de las guías de onda rectangulares y circularesDavid Omar Mateo LopezNessuna valutazione finora
- Desarrollo de Algoritmos para El Analisis y Diseño de Elementos de Concreto Reforzado Con Base en La Nsr-10Documento26 pagineDesarrollo de Algoritmos para El Analisis y Diseño de Elementos de Concreto Reforzado Con Base en La Nsr-10Maurop9Nessuna valutazione finora
- MyO Taller 2Documento3 pagineMyO Taller 2Yudi Adriana Avila PinillaNessuna valutazione finora
- Calculo Mecanico Lineas y PostesDocumento74 pagineCalculo Mecanico Lineas y PostesLuis Carlos JaramilloNessuna valutazione finora
- Reporte de Practica de Laboratorio 1 Probabilidad y EstadisticaDocumento9 pagineReporte de Practica de Laboratorio 1 Probabilidad y EstadisticaManuel Nieves MontesNessuna valutazione finora
- Vigas de CimentacionDocumento31 pagineVigas de CimentacionELCAZADORNessuna valutazione finora
- 3.1 - Parte - PDF AFA BASICODocumento23 pagine3.1 - Parte - PDF AFA BASICOCesar Araujo RodriguezNessuna valutazione finora
- Cinematica de Fluidos y AplicacionDocumento23 pagineCinematica de Fluidos y AplicacionJavier Daniel Antúnez AntúnezNessuna valutazione finora
- Tarea 1Documento6 pagineTarea 1Mar GarciaNessuna valutazione finora
- Prueba2 RESISTENCIADocumento4 paginePrueba2 RESISTENCIADanilo MuñozNessuna valutazione finora
- CINEMÁTICA I y IIDocumento8 pagineCINEMÁTICA I y IIKevin AmpieroNessuna valutazione finora
- 1.conceptos Físicos Básicos Sobre Transmisión de PotenciaDocumento6 pagine1.conceptos Físicos Básicos Sobre Transmisión de PotenciaJavier Orlando Herrera BlasNessuna valutazione finora
- Laboratorio Fisica Electromagnetica 3 3030Documento10 pagineLaboratorio Fisica Electromagnetica 3 3030VIVIANA DIAZ CARRILLONessuna valutazione finora
- TALLER No 1. TALLER DE FISICA MECANICA 2021-2 OkDocumento4 pagineTALLER No 1. TALLER DE FISICA MECANICA 2021-2 OkFABIAN ANDRES CHAVARRO AMEZQUITANessuna valutazione finora
- Diseño Estructura de Muro - CaptacionDocumento7 pagineDiseño Estructura de Muro - CaptacionMiguel Egoavil TaipeNessuna valutazione finora
- Cuantica Con SolucionesDocumento7 pagineCuantica Con SolucionesNaia GarayNessuna valutazione finora
- Guia Parcial 1 TelecomunicacionesII 14sep2021Documento5 pagineGuia Parcial 1 TelecomunicacionesII 14sep2021Daniel Alexander Vasquez CazonNessuna valutazione finora
- ManometriaDocumento7 pagineManometriaEver Jhonatan Ramos IslaNessuna valutazione finora
- Actitudinal 1Documento2 pagineActitudinal 1Melanie JarabaNessuna valutazione finora
- Problemas Propuestos 01 Oscilaciones y Ondas MecánicasDocumento4 pagineProblemas Propuestos 01 Oscilaciones y Ondas Mecánicaskevin david vasquezNessuna valutazione finora
- s05 Jbenitez Termodinamica 2023 1Documento52 pagines05 Jbenitez Termodinamica 2023 1MILAGROS ALEJANDRANessuna valutazione finora
- Flotación en fluidos: Principio de Arquímedes y densidadDocumento11 pagineFlotación en fluidos: Principio de Arquímedes y densidadFrancis J Carlos QNessuna valutazione finora
- Examen Final - ICDocumento4 pagineExamen Final - ICLeonel Alexis Suarez QuiñonezNessuna valutazione finora
- Notas Cortas FisicaDocumento52 pagineNotas Cortas FisicaJose AlemánNessuna valutazione finora
- Trabajo James Prescott JouleDocumento4 pagineTrabajo James Prescott JouleAlexNessuna valutazione finora
- Calcule Los Siguientes LimitesDocumento5 pagineCalcule Los Siguientes LimitesDaniel VillalobosNessuna valutazione finora
- Modulo 1 Emisores Opticos Tipos y Parametros CaracteristicosDocumento26 pagineModulo 1 Emisores Opticos Tipos y Parametros CaracteristicosRichard Andres Cuadros TamayoNessuna valutazione finora