Potrebbero piacerti anche
- ECE 476 Power System AnalysisDocumento35 pagineECE 476 Power System AnalysisFady MichealNessuna valutazione finora
- Somnath Bharadwaj Solutions (4-5)Documento4 pagineSomnath Bharadwaj Solutions (4-5)Abhinaba Saha67% (3)
- Chapter 11, Solution 19.: Note That Is A Given Function of - + +Documento2 pagineChapter 11, Solution 19.: Note That Is A Given Function of - + +LUIS ALEXANDER RODRIGUEZ ZAPATANessuna valutazione finora
- I I I V Z L V dt+C dV dt Vm R Vm ωL A cos (ωt +θ) Acosωtcosθ−AsinωtsinθDocumento10 pagineI I I V Z L V dt+C dV dt Vm R Vm ωL A cos (ωt +θ) Acosωtcosθ−Asinωtsinθyuda pujaNessuna valutazione finora
- 15 Newtons Divided Difference LectureDocumento23 pagine15 Newtons Divided Difference LectureJhoan Marie SaritadoNessuna valutazione finora
- 6-01-Interpolasi LangsungDocumento15 pagine6-01-Interpolasi LangsungnaufalNessuna valutazione finora
- CE206 - Numerical Differentiation IntegrationDocumento14 pagineCE206 - Numerical Differentiation Integrationsazid alamNessuna valutazione finora
- AntiderivativesDocumento6 pagineAntiderivativesMark NerbNessuna valutazione finora
- Tutorial 3 PDFDocumento2 pagineTutorial 3 PDFYashodhan JaltareNessuna valutazione finora
- HW1 SolutionDocumento5 pagineHW1 Solutionroyadaneshi2001Nessuna valutazione finora
- Tutorial 2Documento6 pagineTutorial 2irakool2014Nessuna valutazione finora
- Numerical Interpolation and Curve FittingDocumento126 pagineNumerical Interpolation and Curve FittingPrince KumarNessuna valutazione finora
- Problem29 48Documento2 pagineProblem29 48IENCSNessuna valutazione finora
- Spec RelDocumento24 pagineSpec Relsaurabh satsangiNessuna valutazione finora
- VersionA 1225 Test4 Final AnswersDocumento5 pagineVersionA 1225 Test4 Final AnswersIncreDABelsNessuna valutazione finora
- ME2112 Tutorial 2 Key StepsDocumento7 pagineME2112 Tutorial 2 Key StepsdinodanoNessuna valutazione finora
- 5 InterpolationDocumento71 pagine5 InterpolationNada EssamNessuna valutazione finora
- 6-03-Interpolasi DividedDocumento20 pagine6-03-Interpolasi DividednaufalNessuna valutazione finora
- Tutorial 2 Solution Outline Q1 Ds B: T BS T DT D V V IDocumento7 pagineTutorial 2 Solution Outline Q1 Ds B: T BS T DT D V V Isamfisher1257Nessuna valutazione finora
- Theory of Vibrations: Assignment-2 (Solutions)Documento14 pagineTheory of Vibrations: Assignment-2 (Solutions)Shuvanjan Dahal100% (2)
- Direct MethodDocumento15 pagineDirect Methodchihuahua fanNessuna valutazione finora
- Final Exam W07-SoutionsDocumento3 pagineFinal Exam W07-SoutionsMalik ANessuna valutazione finora
- Calculus SolutionsDocumento6 pagineCalculus Solutionsmienkyuc.k100lhpNessuna valutazione finora
- Tutorial 2 PDFDocumento7 pagineTutorial 2 PDFYong YeeNessuna valutazione finora
- 2 X-Ray Diffraction MethodsDocumento8 pagine2 X-Ray Diffraction MethodsSULAY ALMENDRA AMEZQUITA CHOQUENessuna valutazione finora
- 94 100 PDFDocumento10 pagine94 100 PDFPedro Noe CMNessuna valutazione finora
- Partial Differential Equations Handout: 1 Boundary-Value ProblemsDocumento28 paginePartial Differential Equations Handout: 1 Boundary-Value Problemsmohinuddin12456Nessuna valutazione finora
- Question Paper Code: X85762: Aeronautical EngineeringDocumento3 pagineQuestion Paper Code: X85762: Aeronautical EngineeringSHANMUGARAJ MADASAMYNessuna valutazione finora
- Interpolasi NewtonDocumento23 pagineInterpolasi NewtonIman NoorNessuna valutazione finora
- 2012/2013 Vibration Theory and Applications Assignment 1 (By Lin Shaodun, A0066078X)Documento4 pagine2012/2013 Vibration Theory and Applications Assignment 1 (By Lin Shaodun, A0066078X)Erdiner ParmaksızNessuna valutazione finora
- Q P P P P P P P P P P: Fall 2003 Society of Actuaries Course 3 Solutions Question #1 Key: EDocumento40 pagineQ P P P P P P P P P P: Fall 2003 Society of Actuaries Course 3 Solutions Question #1 Key: EHông HoaNessuna valutazione finora
- Answers 5 2012Documento11 pagineAnswers 5 2012Eric KerrNessuna valutazione finora
- Interpol As IDocumento79 pagineInterpol As IDhimas Fajar AlbaniNessuna valutazione finora
- CSE40418-Week 2Documento33 pagineCSE40418-Week 2smithson JoeNessuna valutazione finora
- Assignment - 2 - Updated Solution - ME354ADocumento13 pagineAssignment - 2 - Updated Solution - ME354Adagani ranisamyukthaNessuna valutazione finora
- MXCXKXF T: (Sin Cos) +Documento9 pagineMXCXKXF T: (Sin Cos) +Dana MNessuna valutazione finora
- MEB Modelling TrainingDocumento83 pagineMEB Modelling TrainingA AbiyyuNessuna valutazione finora
- Properties of The Wave Equation On RDocumento12 pagineProperties of The Wave Equation On RElohim Ortiz CaballeroNessuna valutazione finora
- Relativistic Quantum Mechanics Homework 1 (Solution) : September 23, 2007Documento5 pagineRelativistic Quantum Mechanics Homework 1 (Solution) : September 23, 2007Bhuppi KumarNessuna valutazione finora
- Feb 2005 SolutionsDocumento4 pagineFeb 2005 Solutionspaul taniwanNessuna valutazione finora
- Teschl ErrataDocumento10 pagineTeschl ErratasandorNessuna valutazione finora
- ME VibrationDocumento2 pagineME VibrationRichmond OlarteNessuna valutazione finora
- HW9 SolutionDocumento3 pagineHW9 SolutionRavi TejNessuna valutazione finora
- SelectionDocumento15 pagineSelectionMuhammad KamranNessuna valutazione finora
- Assignment 1Documento6 pagineAssignment 1Amber HabibNessuna valutazione finora
- Newton Divided DifferenceDocumento25 pagineNewton Divided DifferenceyuyiipNessuna valutazione finora
- EP's CAP 5Documento4 pagineEP's CAP 5Arthur GouveiaNessuna valutazione finora
- Chapter03 7th SolutionDocumento11 pagineChapter03 7th SolutionRafael Alexandre N PurificacaoNessuna valutazione finora
- Tugasmahasiswa 20230322203857Documento3 pagineTugasmahasiswa 20230322203857Lie LieonNessuna valutazione finora
- CHAPTER 11 Partial Differential Equations: ChangeDocumento28 pagineCHAPTER 11 Partial Differential Equations: Changeanonhy useraNessuna valutazione finora
- CH 02Documento42 pagineCH 02Whats UPNessuna valutazione finora
- Electro PDFDocumento5 pagineElectro PDFJhonNessuna valutazione finora
- 08 Differential Equations - Second Order LDE ApplicationsDocumento25 pagine08 Differential Equations - Second Order LDE ApplicationsRemo Rubian EvangelistaNessuna valutazione finora
- Ejemplo Cálculo de Impedancia Equivalente: Problem 9.51Documento4 pagineEjemplo Cálculo de Impedancia Equivalente: Problem 9.51Anastasia PatridgeNessuna valutazione finora
- Final Exam SolutionsDocumento31 pagineFinal Exam SolutionsSaswati BanerjeeNessuna valutazione finora
- Problem 1.16 PDFDocumento2 pagineProblem 1.16 PDFGabriel CostaNessuna valutazione finora
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)Da EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)Nessuna valutazione finora
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Da EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Nessuna valutazione finora
- Debanjan Das.Documento42 pagineDebanjan Das.Ankuran SahaNessuna valutazione finora
- Optimum Design of Damper 2pGDocumento2 pagineOptimum Design of Damper 2pGAnkuran SahaNessuna valutazione finora
- Verification of CredentialsDocumento1 paginaVerification of CredentialsAnkuran SahaNessuna valutazione finora
- Format For Student DatabaseDocumento2 pagineFormat For Student DatabaseAnkuran SahaNessuna valutazione finora
- Anti Ragging AffidavitDocumento4 pagineAnti Ragging AffidavitsambitpgdbaNessuna valutazione finora
- Summary of The IEI Saturday Seminar On 19th November 2016Documento1 paginaSummary of The IEI Saturday Seminar On 19th November 2016Ankuran SahaNessuna valutazione finora
- Coin DetailsDocumento2 pagineCoin DetailsAnkuran SahaNessuna valutazione finora
- Bedboti by Syed Mustafa SirajDocumento54 pagineBedboti by Syed Mustafa SirajAnkuran SahaNessuna valutazione finora
- Airbus. Test EquipmentDocumento14 pagineAirbus. Test EquipmentСергей НиколаевNessuna valutazione finora
- Icramid 148Documento8 pagineIcramid 148Nazrul RahmanNessuna valutazione finora
- The Study of 220 KV Power Substation Equipment DetailsDocumento90 pagineThe Study of 220 KV Power Substation Equipment DetailsAman GauravNessuna valutazione finora
- Dynamic Earth Pressures - Simplified Methods PDFDocumento38 pagineDynamic Earth Pressures - Simplified Methods PDFjh50000Nessuna valutazione finora
- Hall Effect Describes The Behavior of Free Charge Carriers in The Semiconductor When Subjected To The Electric and Magnetic FieldsDocumento2 pagineHall Effect Describes The Behavior of Free Charge Carriers in The Semiconductor When Subjected To The Electric and Magnetic FieldsTanawushNessuna valutazione finora
- Protective Device NumbersDocumento6 pagineProtective Device NumbersVijay RaghavanNessuna valutazione finora
- Standards ClassificationDocumento45 pagineStandards ClassificationMohammed AnsafNessuna valutazione finora
- Circuits 1 - Delta To WyeDocumento11 pagineCircuits 1 - Delta To WyeAnthony CortezNessuna valutazione finora
- High-Pass and Low-Pass FiltersDocumento5 pagineHigh-Pass and Low-Pass FiltersnayrochfrNessuna valutazione finora
- PHY107 Lab ManualsDocumento56 paginePHY107 Lab ManualsSam BlackwoodNessuna valutazione finora
- Lecture 26: The Principle of Least Action (Hamilton's Principle)Documento6 pagineLecture 26: The Principle of Least Action (Hamilton's Principle)ElumalaiNessuna valutazione finora
- Electrical Grounding PDFDocumento9 pagineElectrical Grounding PDFPrabhu ChandranNessuna valutazione finora
- Varun Kumar GDocumento5 pagineVarun Kumar GVarun KumarNessuna valutazione finora
- Calculation of The Impedance of Rotor Cage End RingsDocumento10 pagineCalculation of The Impedance of Rotor Cage End RingsjalilemadiNessuna valutazione finora
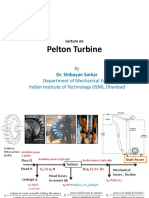
- Pelton Turbine: Department of Mechanical Engg Indian Institute of Technology (ISM), DhanbadDocumento8 paginePelton Turbine: Department of Mechanical Engg Indian Institute of Technology (ISM), DhanbadRajesh ShuklaNessuna valutazione finora
- STRC201 Sdof JMWB PDFDocumento99 pagineSTRC201 Sdof JMWB PDFAkash ChandraNessuna valutazione finora
- Dictionary en CRO TechnicalDocumento1.105 pagineDictionary en CRO TechnicalKatarina R.M.Nessuna valutazione finora
- (A) MARTIN 2003 - What Is Field TheoryDocumento50 pagine(A) MARTIN 2003 - What Is Field TheoryDiego Maganhotto CoraiolaNessuna valutazione finora
- Maxwell's Equations and Stoke's TheoremDocumento26 pagineMaxwell's Equations and Stoke's TheoremTuya ErdenejargalNessuna valutazione finora
- Ieee 4 PDFDocumento1 paginaIeee 4 PDFJayagurunathanNessuna valutazione finora
- VP 265 VL VP (P.F PT Pa Pa Pa 243902.44 VA Pa IL 306.79 AmpsDocumento5 pagineVP 265 VL VP (P.F PT Pa Pa Pa 243902.44 VA Pa IL 306.79 AmpsNiño John JaymeNessuna valutazione finora
- FDNRDocumento16 pagineFDNRYashi GuptaNessuna valutazione finora
- Gce o Level 2011 Physics 5058 Paper 1 SolutionsDocumento26 pagineGce o Level 2011 Physics 5058 Paper 1 Solutionsjan12th2004Nessuna valutazione finora
- Reading: (1.) (2.) (3.) (4.) : Omework DUE Hurs AN in ClassDocumento2 pagineReading: (1.) (2.) (3.) (4.) : Omework DUE Hurs AN in ClassGoutham EzhilarasuNessuna valutazione finora
- MCC and Panels Maintenance ProcedureDocumento15 pagineMCC and Panels Maintenance ProcedureÁlvaro Manterola Lazcano100% (19)
- ID FanDocumento7 pagineID FanDony RamdhaniNessuna valutazione finora
- Insulation Testing of Low Voltage CablesDocumento12 pagineInsulation Testing of Low Voltage Cablesmarkigldmm918100% (2)
- Ee100 Basics Of: Electrical EngineeringDocumento4 pagineEe100 Basics Of: Electrical EngineeringgmNessuna valutazione finora
- Maxwell EquationDocumento10 pagineMaxwell EquationRakesh KumarNessuna valutazione finora
- Electromagnetism and MotorsDocumento7 pagineElectromagnetism and Motorsi don't have enough money for chicken nuggetsNessuna valutazione finora