Potrebbero piacerti anche
- Structural Drawings: Pared by Another Professional Engineer States The Following, "ClientsDocumento1 paginaStructural Drawings: Pared by Another Professional Engineer States The Following, "ClientsselinaNessuna valutazione finora
- Geotechnical design assumptions and quality assurance processDocumento1 paginaGeotechnical design assumptions and quality assurance processselinaNessuna valutazione finora
- AlgebraDocumento3 pagineAlgebraAbrahim A Verde ANessuna valutazione finora
- EarthDocumento1 paginaEarthselinaNessuna valutazione finora
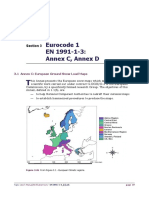
- S 2 e 1 en 1991-1-3: A A, A BDocumento1 paginaS 2 e 1 en 1991-1-3: A A, A BselinaNessuna valutazione finora
- S 2 E 1 EN 1991-1-3: A A, A B: B Min 5h 5 MDocumento1 paginaS 2 E 1 EN 1991-1-3: A A, A B: B Min 5h 5 MselinaNessuna valutazione finora
- S 2 E 1 EN 1991-1-3: A A, A B: SolutionDocumento1 paginaS 2 E 1 EN 1991-1-3: A A, A B: SolutionselinaNessuna valutazione finora
- Stâlpi Din Beton ArmatDocumento27 pagineStâlpi Din Beton ArmatselinaNessuna valutazione finora
- REBARSDocumento1 paginaREBARSselinaNessuna valutazione finora
- Structural Engineering Design Services For Buildings GuidelineDocumento1 paginaStructural Engineering Design Services For Buildings GuidelineselinaNessuna valutazione finora
- 2.4 References (Section 2) : S S 4 67 0 60 2 80 KN / MDocumento1 pagina2.4 References (Section 2) : S S 4 67 0 60 2 80 KN / MselinaNessuna valutazione finora
- Eurocode 1 EN 1991-1-3: Annex C, Annex D: Section 3Documento1 paginaEurocode 1 EN 1991-1-3: Annex C, Annex D: Section 3selinaNessuna valutazione finora
- Eurocode Spreadsheets Structural Design Section 2Documento1 paginaEurocode Spreadsheets Structural Design Section 2selinaNessuna valutazione finora
- Eurocode spreadsheets structural design section 2Documento1 paginaEurocode spreadsheets structural design section 2selinaNessuna valutazione finora
- Case B: Case C:: S 2 E 1 EN 1991-1-3: A A, A BDocumento1 paginaCase B: Case C:: S 2 E 1 EN 1991-1-3: A A, A BselinaNessuna valutazione finora
- 3.3 Verification Tests: S 3 E 1 EN 1991-1-3: A C, A DDocumento1 pagina3.3 Verification Tests: S 3 E 1 EN 1991-1-3: A C, A DselinaNessuna valutazione finora
- S 3 e 1 en 1991-1-3: A C, A DDocumento1 paginaS 3 e 1 en 1991-1-3: A C, A DselinaNessuna valutazione finora
- S 3 e 1 en 1991-1-3: A C, A DDocumento1 paginaS 3 e 1 en 1991-1-3: A C, A DselinaNessuna valutazione finora
- Eurocode 1 Snow Load Calculation for UK & IrelandDocumento1 paginaEurocode 1 Snow Load Calculation for UK & IrelandselinaNessuna valutazione finora
- Seismic LoadDocumento1 paginaSeismic LoadselinaNessuna valutazione finora
- Structural Design Data MatrixDocumento1 paginaStructural Design Data MatrixselinaNessuna valutazione finora
- S 3 e 1 en 1991-1-3: A C, A DDocumento1 paginaS 3 e 1 en 1991-1-3: A C, A DselinaNessuna valutazione finora
- Eurocode 1 EN 1991-1-3: Section 1Documento1 paginaEurocode 1 EN 1991-1-3: Section 1selinaNessuna valutazione finora
- 1.3 Design Situations: S 1 E 1 EN 1991-1-3Documento1 pagina1.3 Design Situations: S 1 E 1 EN 1991-1-3selinaNessuna valutazione finora
- P 13Documento1 paginaP 13selinaNessuna valutazione finora
- P 17Documento1 paginaP 17selinaNessuna valutazione finora
- P 16Documento1 paginaP 16selinaNessuna valutazione finora
- Eurocode 1 EN 1991-1-3: Section 1Documento1 paginaEurocode 1 EN 1991-1-3: Section 1selinaNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5782)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Manual de Usuario Hamilton Beach 40515R (Español - 28 Páginas)Documento3 pagineManual de Usuario Hamilton Beach 40515R (Español - 28 Páginas)yanelin escandelaNessuna valutazione finora
- Merdeka Copper GoldDocumento5 pagineMerdeka Copper GoldChrisna Anggara PutraNessuna valutazione finora
- B1 Unit 6 PDFDocumento1 paginaB1 Unit 6 PDFMt Mt100% (2)
- Horse Meets Dog, by Elliot Kalan and Tim Miller, Is A Book About A Horse That Meets A Dog ForDocumento14 pagineHorse Meets Dog, by Elliot Kalan and Tim Miller, Is A Book About A Horse That Meets A Dog Forapi-559432931Nessuna valutazione finora
- IEEE STD 1193™-2003 Guide For Measurement of Environmental SensitivitiesDocumento81 pagineIEEE STD 1193™-2003 Guide For Measurement of Environmental SensitivitiesVitalyNessuna valutazione finora
- Epigraphs - SubtitleDocumento2 pagineEpigraphs - Subtitle17ariakornNessuna valutazione finora
- J305GAC Trojan Data SheetsDocumento2 pagineJ305GAC Trojan Data SheetsEdisson Alarcon MoraNessuna valutazione finora
- Brochure DRYVIEW 5700 201504 PDFDocumento4 pagineBrochure DRYVIEW 5700 201504 PDFRolando Vargas PalacioNessuna valutazione finora
- DbtdihwnaDocumento6 pagineDbtdihwnaapi-2522304Nessuna valutazione finora
- NetflixDocumento10 pagineNetflixJosue Yael De Los Santos DelgadoNessuna valutazione finora
- Contanuity Case StudyDocumento14 pagineContanuity Case StudyUsama TariqNessuna valutazione finora
- Afs General - Adjustment-TestDocumento4 pagineAfs General - Adjustment-Testphuong leNessuna valutazione finora
- Pediatric Nurse Cover LetterDocumento5 paginePediatric Nurse Cover Letterafjwoovfsmmgff100% (2)
- Mike-Rose - The-Language-of-Exclusion (Edited)Documento20 pagineMike-Rose - The-Language-of-Exclusion (Edited)abankiNessuna valutazione finora
- Interview@InfosysDocumento13 pagineInterview@InfosysSudheer KumarNessuna valutazione finora
- Calculating Ampacity in Small-Gauge, Electrical Cables: Greig S. Latham, Member, IEEEDocumento4 pagineCalculating Ampacity in Small-Gauge, Electrical Cables: Greig S. Latham, Member, IEEEAlaa RamadanNessuna valutazione finora
- 2500 ManualDocumento196 pagine2500 Manualfede444Nessuna valutazione finora
- Grinding Process Within Vertical Roller Mills Experiment and SimulationDocumento5 pagineGrinding Process Within Vertical Roller Mills Experiment and SimulationDirceu Nascimento100% (1)
- 120.anti Theft Alerting System For Vehicle (2 Wheeler)Documento3 pagine120.anti Theft Alerting System For Vehicle (2 Wheeler)Basha BashaNessuna valutazione finora
- International Relations Literature Review ExampleDocumento8 pagineInternational Relations Literature Review Exampleauhavmpif100% (1)
- College of Architecture: Why Does It Matter?Documento6 pagineCollege of Architecture: Why Does It Matter?Emma SwanNessuna valutazione finora
- Team GuttersDocumento3 pagineTeam Guttersgailjd1100% (3)
- MGEC61 - LEC 01 & LEC 02 International Economics: Finance Summer 2021Documento8 pagineMGEC61 - LEC 01 & LEC 02 International Economics: Finance Summer 2021Yutong WangNessuna valutazione finora
- QuestionsDocumento10 pagineQuestionsmfoNessuna valutazione finora
- Iso Tc6 ĿDocumento12 pagineIso Tc6 Ŀzrilek1Nessuna valutazione finora
- G5 - CLC 30Documento5 pagineG5 - CLC 30Phuong AnhNessuna valutazione finora
- 3rd Year MBBS Assessment in 3 BlocksDocumento5 pagine3rd Year MBBS Assessment in 3 BlocksEngecoon AcademyNessuna valutazione finora
- Paper H3 - Mock Set 6 - MSchemeDocumento17 paginePaper H3 - Mock Set 6 - MSchemeH Aslam100% (4)
- Q2 - Kinder-WLL-week 20Documento8 pagineQ2 - Kinder-WLL-week 20Marlyn CaballeroNessuna valutazione finora
- Thin - Cambered - Reflexed Airfoil Development For Micro-Air VehiclesDocumento185 pagineThin - Cambered - Reflexed Airfoil Development For Micro-Air VehiclesSaherAbdElMalakNessuna valutazione finora