Potrebbero piacerti anche
- Estática dos Corpos RígidosDocumento14 pagineEstática dos Corpos RígidosMÁRIO LIMANessuna valutazione finora
- Controle de Sistemas MecânicosDocumento21 pagineControle de Sistemas MecânicosAna AnaNessuna valutazione finora
- Modelo Da Máquina De Indução E Geração DistribuídaDa EverandModelo Da Máquina De Indução E Geração DistribuídaNessuna valutazione finora
- Aula PolegadasDocumento12 pagineAula PolegadasRodrigo Lopes RodriguesNessuna valutazione finora
- Momento de Inércia: Cálculo e Aplicações EstruturaisDocumento9 pagineMomento de Inércia: Cálculo e Aplicações EstruturaisJessika GoltaraNessuna valutazione finora
- 1567-Resumo P3 Física 2.originalDocumento47 pagine1567-Resumo P3 Física 2.originalAbner Roque Dias Guarani KaiowáNessuna valutazione finora
- Robótica: Fundamentos, Programação e AplicaçõesDocumento1 paginaRobótica: Fundamentos, Programação e AplicaçõesDavid Augusto RibeiroNessuna valutazione finora
- Movimento harmônico simplesDocumento6 pagineMovimento harmônico simplesDarkArkangel2100% (1)
- 5-Controle-I-Modelagem Matemática de Sistemas Elétricos e Mecânicos PDFDocumento36 pagine5-Controle-I-Modelagem Matemática de Sistemas Elétricos e Mecânicos PDFLucas NunesNessuna valutazione finora
- 42 Eletrostatica5Documento5 pagine42 Eletrostatica5api-3713096100% (1)
- Lista de Exercícios # 1-Algebra VetorialDocumento7 pagineLista de Exercícios # 1-Algebra VetorialdanielatomicoNessuna valutazione finora
- Física II - Aula 01 - Movimento Harmônico Simples PDFDocumento21 pagineFísica II - Aula 01 - Movimento Harmônico Simples PDFademir_lealNessuna valutazione finora
- Gabarito 1° TVC – G.A.S.L. – TURMA GDocumento3 pagineGabarito 1° TVC – G.A.S.L. – TURMA GCaio AraújoNessuna valutazione finora
- 1a Lista de Exercícios - Cinematica UFPADocumento3 pagine1a Lista de Exercícios - Cinematica UFPACezzar PaesNessuna valutazione finora
- Mecanismos com um grau de liberdadeDocumento59 pagineMecanismos com um grau de liberdadeJéfferson Santos100% (1)
- Movimentos planosDocumento24 pagineMovimentos planosDenivaldo Oliveira Santos100% (1)
- Apostila de Vibrações MecânicasDocumento22 pagineApostila de Vibrações MecânicasSávio Nunes da SilvaNessuna valutazione finora
- Lista de Exercicios Zero de FuncoesDocumento4 pagineLista de Exercicios Zero de FuncoesLuan carlosNessuna valutazione finora
- F128 Exercicios Resolvidos Cap 9ADocumento15 pagineF128 Exercicios Resolvidos Cap 9AsarinhahartNessuna valutazione finora
- Lista 01 Dinamica Das Maquinas - Cimematica - SolucaoDocumento18 pagineLista 01 Dinamica Das Maquinas - Cimematica - SolucaoCarlos Marlon SantosNessuna valutazione finora
- Estudo Do Plano em R3Documento13 pagineEstudo Do Plano em R3Euclides100% (1)
- Exercicios Limites ContinuidadeDocumento15 pagineExercicios Limites ContinuidadeMisael TeixeiraNessuna valutazione finora
- Lista de Exercicios - AVA Unidade 3Documento36 pagineLista de Exercicios - AVA Unidade 3Pedro CésarNessuna valutazione finora
- 65929-Aula 10 - Programação e Simulação de RobôsDocumento32 pagine65929-Aula 10 - Programação e Simulação de RobôsLucas BauerNessuna valutazione finora
- CalculoIII PDFDocumento34 pagineCalculoIII PDFGabio StalinNessuna valutazione finora
- Formulário MEC 2Documento6 pagineFormulário MEC 2Altair AlvesNessuna valutazione finora
- Equacoes Lineares de Primeira OrdemDocumento2 pagineEquacoes Lineares de Primeira OrdemalexfmiNessuna valutazione finora
- FAMEC: Centro de Gravidade e CentróideDocumento5 pagineFAMEC: Centro de Gravidade e CentróideCaio CostaNessuna valutazione finora
- Conversões binárias para decimal e exercíciosDocumento22 pagineConversões binárias para decimal e exercíciosFilipe OliveiraNessuna valutazione finora
- Trabalho e EnergiaDocumento16 pagineTrabalho e EnergiaClaudia PereiraNessuna valutazione finora
- Ondas EletromagnéticasDocumento8 pagineOndas EletromagnéticasIgor FreitasNessuna valutazione finora
- Exercícios Controle e ServomecanismosDocumento4 pagineExercícios Controle e ServomecanismosHugo FusinatoNessuna valutazione finora
- Áreas e Centros de GravidadeDocumento18 pagineÁreas e Centros de GravidadeAPTA-Paulo Gomes100% (1)
- Fisica Exp I - Força Elestica-RoldanasDocumento20 pagineFisica Exp I - Força Elestica-RoldanasWagner LimaNessuna valutazione finora
- 5 - Exercicios de Parafusos de PotênciaDocumento11 pagine5 - Exercicios de Parafusos de Potênciaisac santos100% (1)
- Projeto de chaveta paralela para árvore de 49 mm de diâmetroDocumento4 pagineProjeto de chaveta paralela para árvore de 49 mm de diâmetroEder CoserNessuna valutazione finora
- Introdução à Modelagem e Simulação de Sistemas DinâmicosDocumento16 pagineIntrodução à Modelagem e Simulação de Sistemas DinâmicossergiojgsNessuna valutazione finora
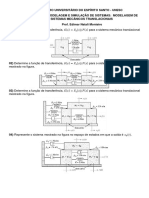
- UNESC Sistemas Mecânicos Translacionais ModelosDocumento2 pagineUNESC Sistemas Mecânicos Translacionais ModelosEnzo Gomes KohlertNessuna valutazione finora
- Exercicios e EletropneumaticaDocumento9 pagineExercicios e EletropneumaticaJeferson Iazorli67% (3)
- Diagramas de Esforços InternosDocumento45 pagineDiagramas de Esforços InternosDaniel PereiraNessuna valutazione finora
- Aula 11a - Exercícios Propostos e Resolvidos - Vibração Livre 1GLDocumento4 pagineAula 11a - Exercícios Propostos e Resolvidos - Vibração Livre 1GLNathalia100% (1)
- Relatório - Ondas EstacionáriasDocumento11 pagineRelatório - Ondas EstacionáriasWagner FêulipeNessuna valutazione finora
- Geometria Plana FundamentosDocumento31 pagineGeometria Plana FundamentosVinicius QuintilianoNessuna valutazione finora
- AULA 08 - LTC37B Controle 02 - Projeto de Servossistemas do Tipo 1Documento32 pagineAULA 08 - LTC37B Controle 02 - Projeto de Servossistemas do Tipo 1Michel FiuzaNessuna valutazione finora
- Bombas e estações elevatórias: tipos e funcionamentoDocumento52 pagineBombas e estações elevatórias: tipos e funcionamentoPedro BrondaniNessuna valutazione finora
- Matrizes: Inversão, Operações e FormasDocumento8 pagineMatrizes: Inversão, Operações e FormasEmanoel Fabiano Menezes PereiraNessuna valutazione finora
- Cortes com desvios de translação e rotação em desenho técnico mecânicoDocumento8 pagineCortes com desvios de translação e rotação em desenho técnico mecânicoSandro FerreiraNessuna valutazione finora
- Atividade 1 - ExercíciosDocumento3 pagineAtividade 1 - ExercíciosLeonardo PulporNessuna valutazione finora
- Geometria Analítica e Vetorial - Parametrização de CurvasDocumento22 pagineGeometria Analítica e Vetorial - Parametrização de CurvasGiselle CastroNessuna valutazione finora
- Mecanismos Oscilantes e Elementos de Máquinas IIDocumento40 pagineMecanismos Oscilantes e Elementos de Máquinas IIAndre Rodrigues BorgesNessuna valutazione finora
- Experiência-1 - OsciloscopioDocumento7 pagineExperiência-1 - OsciloscopioThalis CaixetaNessuna valutazione finora
- Seleção de correias Gates para transmissão de potência em misturadorDocumento6 pagineSeleção de correias Gates para transmissão de potência em misturadorCaetano GuareschiNessuna valutazione finora
- It A 2002Documento119 pagineIt A 2002professorhamiltonNessuna valutazione finora
- Análise cinemática de motor rotativo com cilindroides elípticosDocumento18 pagineAnálise cinemática de motor rotativo com cilindroides elípticoslukedayz100% (1)
- Apostila-Calculo IIDocumento95 pagineApostila-Calculo IIPriscila AmaralNessuna valutazione finora
- Funções de Transferência em Sistemas de ControleDocumento38 pagineFunções de Transferência em Sistemas de ControleLuis AraujoNessuna valutazione finora
- Análise de Um Pêndulo Duplo, Com Abordagem Lagrangiana e Método de Runge-KuttaDocumento4 pagineAnálise de Um Pêndulo Duplo, Com Abordagem Lagrangiana e Método de Runge-KuttaGabriel de AlmeidaNessuna valutazione finora
- P2 - Analises Com Met. KaneDocumento49 pagineP2 - Analises Com Met. KaneJúlia NogueiraNessuna valutazione finora
- Introdução à Metalurgia da SoldagemDocumento105 pagineIntrodução à Metalurgia da SoldagemJéfferson SantosNessuna valutazione finora
- 2010 Consolda Barancelli (Arquivo ABS)Documento12 pagine2010 Consolda Barancelli (Arquivo ABS)MartinsaikiNessuna valutazione finora
- Análise de Motores Otto PDFDocumento12 pagineAnálise de Motores Otto PDFJéfferson SantosNessuna valutazione finora
- Mecanismos com um grau de liberdadeDocumento59 pagineMecanismos com um grau de liberdadeJéfferson Santos100% (1)
- Apostila de Maquinas Hidraulicas - V19 PDFDocumento89 pagineApostila de Maquinas Hidraulicas - V19 PDFWeberth Teixeira67% (3)
- VICENTE CHIAVERINI - Tecnologia Mecânica Vol. I - Estrutura e Propriedades Das Ligas MetálicasDocumento141 pagineVICENTE CHIAVERINI - Tecnologia Mecânica Vol. I - Estrutura e Propriedades Das Ligas MetálicasLúcio BarbozaNessuna valutazione finora
- Apostila Ciclos Térmicos CombustiveisDocumento24 pagineApostila Ciclos Térmicos CombustiveisShirley MoreiraNessuna valutazione finora
- Análise de Motores Otto PDFDocumento12 pagineAnálise de Motores Otto PDFJéfferson SantosNessuna valutazione finora
- Aspersão Térmica: Técnica de RevestimentoDocumento102 pagineAspersão Térmica: Técnica de RevestimentoMarcos LeiteNessuna valutazione finora
- Principio Do Trabalho Virtual - MecanismosDocumento32 paginePrincipio Do Trabalho Virtual - MecanismosJéfferson SantosNessuna valutazione finora
- Djairo G. Figueiredo Análise de Fourier e EDPDocumento146 pagineDjairo G. Figueiredo Análise de Fourier e EDPPaulo Henrique AlvesNessuna valutazione finora
- Gilberto Freyre - Homens, Engenharias e Rumos SociaisDocumento116 pagineGilberto Freyre - Homens, Engenharias e Rumos SociaisJéfferson SantosNessuna valutazione finora
- Ga Cap 10Documento6 pagineGa Cap 10gustavoNessuna valutazione finora
- CQ092 L1 DensidadeMetaisDocumento2 pagineCQ092 L1 DensidadeMetaisJéfferson SantosNessuna valutazione finora
- Gilberto Freyre - Homens, Engenharias e Rumos SociaisDocumento116 pagineGilberto Freyre - Homens, Engenharias e Rumos SociaisJéfferson Santos100% (1)
- Apostila FundiçãoDocumento48 pagineApostila FundiçãoLucas BertiNessuna valutazione finora
- Radicais LivresDocumento12 pagineRadicais LivresterapeutaedielNessuna valutazione finora
- Relatório Experimento Sistemas Micro-Ondas UFABCDocumento6 pagineRelatório Experimento Sistemas Micro-Ondas UFABCOverArthurNessuna valutazione finora
- Processos de fabricação por usinagemDocumento93 pagineProcessos de fabricação por usinagemEDUARDO NOVAISNessuna valutazione finora
- Dimensionamento de estações elevatórias de esgotoDocumento9 pagineDimensionamento de estações elevatórias de esgotobiitsNessuna valutazione finora
- (Solution) Cap 9Documento5 pagine(Solution) Cap 9Sthefanie Monica100% (1)
- Caracterização de ruptura em solos e ensaio triaxialDocumento6 pagineCaracterização de ruptura em solos e ensaio triaxialFlávia SantosNessuna valutazione finora
- Potências de Base 10 ExploradasDocumento4 paginePotências de Base 10 ExploradasCaroline Borsoi0% (1)
- Bomba centrífuga residencial BCR2000Documento77 pagineBomba centrífuga residencial BCR2000Edwin Arana HerbasNessuna valutazione finora
- Contatores proteção acionamentosDocumento9 pagineContatores proteção acionamentosHely Galvao Júnior GalvãoNessuna valutazione finora
- Energía potencial eléctrica carga campoDocumento65 pagineEnergía potencial eléctrica carga campojehisenNessuna valutazione finora
- Controle Robusto Multivariável - Diego Vinicius Drumond Da CruzDocumento7 pagineControle Robusto Multivariável - Diego Vinicius Drumond Da CruzDiego DrumondNessuna valutazione finora
- Projeto de elevador de caneca com redutor e correiaDocumento23 pagineProjeto de elevador de caneca com redutor e correiaBrunno Venancio0% (1)
- Rede de Média TensãoDocumento3 pagineRede de Média TensãoRadames LimaNessuna valutazione finora
- Manual de operação espectrofotômetro CELM E-225DDocumento11 pagineManual de operação espectrofotômetro CELM E-225DAndré BusnardoNessuna valutazione finora
- Estequiometria: quantidades em reaçõesDocumento50 pagineEstequiometria: quantidades em reaçõesTársisBaiaNessuna valutazione finora
- Ge TP1 2010Documento5 pagineGe TP1 2010badaloucasNessuna valutazione finora
- Resumos de Física I: Movimento RelativoDocumento5 pagineResumos de Física I: Movimento RelativoClaudia AbreuNessuna valutazione finora
- NBR 05738 - 2003 - Concreto - Procedimento para Moldagem e Cura de Corpos-De-ProvaDocumento6 pagineNBR 05738 - 2003 - Concreto - Procedimento para Moldagem e Cura de Corpos-De-ProvaWashington BernardinoNessuna valutazione finora
- A Geometria na Criação do UniversoDocumento19 pagineA Geometria na Criação do Universobetofito75% (4)
- Exp 4 - Grupo 6 e 7 - Relatorio Permanganometria - Agua OxigenadaDocumento7 pagineExp 4 - Grupo 6 e 7 - Relatorio Permanganometria - Agua OxigenadaDimmu Borgir100% (1)
- Dimensionamento e Condutores Por CritériosDocumento40 pagineDimensionamento e Condutores Por CritériosNelson RibeiroNessuna valutazione finora
- Conceitos de mecânica aplicadaDocumento40 pagineConceitos de mecânica aplicadarcejrNessuna valutazione finora
- Eletroforese Bidimensional CADocumento63 pagineEletroforese Bidimensional CAPedro Hamann100% (1)
- Fundamentos da Soldagem Oxi-combustívelDocumento83 pagineFundamentos da Soldagem Oxi-combustívelWarlen NonatoNessuna valutazione finora
- Coeficiente de Correlação Ró de SpearmanDocumento3 pagineCoeficiente de Correlação Ró de SpearmancaiopetroniosNessuna valutazione finora
- Radioproteção Aula1 2010Documento40 pagineRadioproteção Aula1 2010Évila SáNessuna valutazione finora
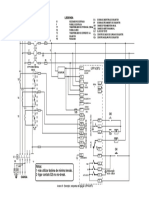
- Esquema de ligação de um URP1439TUDocumento1 paginaEsquema de ligação de um URP1439TUThais FonsêcaNessuna valutazione finora
- Caldeiras: tipos e componentesDocumento22 pagineCaldeiras: tipos e componentesVívia CastroNessuna valutazione finora
- Disjuntores em caixa moldada DWB e DWA: manobra e proteção em circuitos industriaisDocumento56 pagineDisjuntores em caixa moldada DWB e DWA: manobra e proteção em circuitos industriaisMarcelo Baptista0% (1)
- Equilíbrio Químico e Princípio de Le ChatelierDocumento2 pagineEquilíbrio Químico e Princípio de Le ChatelierRicardo MartinsNessuna valutazione finora