Potrebbero piacerti anche
- Introducción A La RobóticaDocumento19 pagineIntroducción A La RobóticaCaleb Guerra GonzalesNessuna valutazione finora
- Primer TareaDocumento8 paginePrimer TareaRoberto ServinNessuna valutazione finora
- Tema 1.1 RobóticaDocumento14 pagineTema 1.1 RobóticaPhillips Ürlich Luis FelipeNessuna valutazione finora
- Robotica MorfologíaDocumento11 pagineRobotica MorfologíaEduardo MurilloNessuna valutazione finora
- Robotica GeneralDocumento185 pagineRobotica GeneralRomán AndrésNessuna valutazione finora
- Modulo 1 Titulo 1 Robotica 1Documento7 pagineModulo 1 Titulo 1 Robotica 1angelica joannaNessuna valutazione finora
- Yo RobotDocumento15 pagineYo RobotElizabeth HernándezNessuna valutazione finora
- Anatomia de Un RobotDocumento48 pagineAnatomia de Un RobotDavid GarciaNessuna valutazione finora
- Robótica y Aplicaciones La MineríaDocumento8 pagineRobótica y Aplicaciones La MineríaJesús DíazNessuna valutazione finora
- Clase 1 Introducción A La Robótica 2020Documento31 pagineClase 1 Introducción A La Robótica 2020Royeiro Xavi DuduNessuna valutazione finora
- Cuestionario de RobóticaDocumento12 pagineCuestionario de RobóticaWilliam Solarte100% (1)
- 1 Introducción A La RobóticaDocumento38 pagine1 Introducción A La RobóticaPedro Angel Villada Sanchez100% (1)
- Robotica 3.1 y 3.2 MamalonaDocumento34 pagineRobotica 3.1 y 3.2 MamalonaCesar OmarNessuna valutazione finora
- Síntesis de Robot SCARADocumento2 pagineSíntesis de Robot SCARAkevinNessuna valutazione finora
- Tarea N°1Documento6 pagineTarea N°1Abdiel AguilarNessuna valutazione finora
- Wa0005Documento12 pagineWa0005Mari ElstonNessuna valutazione finora
- Flores Balderrama Ivan ManuelDocumento12 pagineFlores Balderrama Ivan ManuelBerta BalleyNessuna valutazione finora
- Evolucion de La RoboticaDocumento7 pagineEvolucion de La RoboticaCinthya JiménezNessuna valutazione finora
- IntroducciónRobótica 1Documento20 pagineIntroducciónRobótica 1Jorge SilveraNessuna valutazione finora
- LA ROBOTICA Adame Morales Abdiel HazielDocumento15 pagineLA ROBOTICA Adame Morales Abdiel HazielAdame Morales Abdiel HazielNessuna valutazione finora
- Trabajo GrupalDocumento11 pagineTrabajo GrupalJayder Castillo rosalesNessuna valutazione finora
- Origen de La RoboticaDocumento5 pagineOrigen de La RoboticaCristina A. VelásquezNessuna valutazione finora
- Marco Teorico 1Documento24 pagineMarco Teorico 1nikika1Nessuna valutazione finora
- Teoria RoboticaDocumento15 pagineTeoria RoboticaVitto AlcantaraNessuna valutazione finora
- Morfología Del Robot v05Documento65 pagineMorfología Del Robot v05Alejandro CastroNessuna valutazione finora
- Robotica IndustrialDocumento23 pagineRobotica IndustrialLeandro Torres Salazar100% (1)
- Trabajo de TamaraDocumento5 pagineTrabajo de TamaraDennis Ariel PardoNessuna valutazione finora
- Robotica I ParcialDocumento4 pagineRobotica I ParcialAaron HernandezNessuna valutazione finora
- La RoboticaDocumento5 pagineLa RoboticaPucka ChikNessuna valutazione finora
- Cuestionario XDDocumento4 pagineCuestionario XDKari Novillo FlorNessuna valutazione finora
- La Robótica Es La Rama de La Ingeniería MecatrónicaDocumento5 pagineLa Robótica Es La Rama de La Ingeniería MecatrónicaYenith CoronadoNessuna valutazione finora
- Examen Unidad 1 RoboticaDocumento4 pagineExamen Unidad 1 RoboticaMar's MendozaNessuna valutazione finora
- Unidad III RobotsDocumento29 pagineUnidad III RobotsALe RiveraNessuna valutazione finora
- Capitulo 1. Introduccion RoboticaDocumento13 pagineCapitulo 1. Introduccion RoboticaBabyGirl78Nessuna valutazione finora
- Robotica DanielDocumento12 pagineRobotica DanielDaniel LugoNessuna valutazione finora
- TP N1 RoboticaDocumento17 pagineTP N1 RoboticaFacundo SarliNessuna valutazione finora
- S01.s1 - Evolución de La Robótica y Conceptos BásicosDocumento29 pagineS01.s1 - Evolución de La Robótica y Conceptos BásicosJonathanCatariNessuna valutazione finora
- Examen de DinamicaDocumento64 pagineExamen de DinamicaDaniel Flores ReyesNessuna valutazione finora
- Robotica DanielDocumento12 pagineRobotica DanielDaniel LugoNessuna valutazione finora
- Robotic ADocumento7 pagineRobotic Asky blueNessuna valutazione finora
- ROBÓTICADocumento25 pagineROBÓTICAArman JrsNessuna valutazione finora
- Historia de La Robótica IndustrialDocumento7 pagineHistoria de La Robótica IndustrialAlbert William100% (1)
- Robotica IndustrialDocumento97 pagineRobotica IndustrialFranklin Jara Moncayo100% (3)
- Robótica 1Documento17 pagineRobótica 1juanNessuna valutazione finora
- ROBOTICADocumento12 pagineROBOTICAm&yconexiones colombiaNessuna valutazione finora
- Automatizacion en La Industria Petrolera PDFDocumento8 pagineAutomatizacion en La Industria Petrolera PDFYuriMejia100% (1)
- ReboticaDocumento41 pagineReboticaselma flor guerra hernandezNessuna valutazione finora
- Producto Robotica Oficial I UnidadDocumento22 pagineProducto Robotica Oficial I UnidadNatalia Mayumi Osorio LópezNessuna valutazione finora
- Introducción A La RobóticaDocumento19 pagineIntroducción A La RobóticaJean Carlos GoicocheaNessuna valutazione finora
- RoboticaDocumento15 pagineRoboticaKathe Samueza KysNessuna valutazione finora
- 1.introducción A La RobóticaDocumento28 pagine1.introducción A La RobóticaMery VargasNessuna valutazione finora
- Definiciones Robótica IndustrialDocumento32 pagineDefiniciones Robótica IndustrialAngelBNNessuna valutazione finora
- Historia de Los RobotsDocumento7 pagineHistoria de Los RobotsAntonio NavarreteNessuna valutazione finora
- Principios de La RoboticaDocumento2 paginePrincipios de La RoboticaCarlos MadrigalNessuna valutazione finora
- Reporte Brazo Robotico 2 Grados de LibertadDocumento22 pagineReporte Brazo Robotico 2 Grados de LibertadLuis RosasNessuna valutazione finora
- Que Es La RoboticaDocumento6 pagineQue Es La RoboticaJose Ruiloba100% (2)
- Banco de Preguntas RobóticaDocumento4 pagineBanco de Preguntas RobóticaClauz FeRiiaNessuna valutazione finora
- robot móvil: Liberando el potencial visionario de los robots móvilesDa Everandrobot móvil: Liberando el potencial visionario de los robots móvilesNessuna valutazione finora
- ET-018-PEMEX-2019 REv 0Documento13 pagineET-018-PEMEX-2019 REv 0fmseguilior100% (2)
- Taller-De-Puntuacion-Y-Errores-De-Construcción - EconomíaDocumento4 pagineTaller-De-Puntuacion-Y-Errores-De-Construcción - EconomíaValentina VelozaNessuna valutazione finora
- TALLER de TEXTOS Carta de LectoresDocumento5 pagineTALLER de TEXTOS Carta de LectoresLourdes Ledesma Lourdes100% (1)
- Discriminacion LaboralDocumento8 pagineDiscriminacion LaboralEmiliano Montañez CardenasNessuna valutazione finora
- Instituto Del Mar Del PerúDocumento7 pagineInstituto Del Mar Del PerúRoxana Ordoñez VidalNessuna valutazione finora
- Beneficios de La Implementación Del BIMDocumento156 pagineBeneficios de La Implementación Del BIMJuan Javier Macalupu Cuadros100% (1)
- Riaof Vol 3 N2 2020Documento90 pagineRiaof Vol 3 N2 2020Paqui CardonaNessuna valutazione finora
- Hip Hop en AdolescentesDocumento1 paginaHip Hop en AdolescentesIsmael GrijalvaNessuna valutazione finora
- Curso de La Trascendencia Del Educador Durante La Primera InfanciaDocumento4 pagineCurso de La Trascendencia Del Educador Durante La Primera Infancialaura mendezNessuna valutazione finora
- Practica 2. Efectivo y Equivalente de EfectivoDocumento3 paginePractica 2. Efectivo y Equivalente de EfectivoMelanie De LeonNessuna valutazione finora
- Actividad 5 - Tarea Conflicto de InteresesDocumento4 pagineActividad 5 - Tarea Conflicto de InteresesSebastian de la PavaNessuna valutazione finora
- Problemas de Investigación OperativaDocumento7 pagineProblemas de Investigación OperativamestadisticoNessuna valutazione finora
- Discurso Del Día EjércitoDocumento5 pagineDiscurso Del Día EjércitoanimalpoliticoNessuna valutazione finora
- Ladrillo Hueco 12Documento1 paginaLadrillo Hueco 12Abigail Santos PinedaNessuna valutazione finora
- Presentación RIC 06 - Puestaatierra - 270521Documento33 paginePresentación RIC 06 - Puestaatierra - 270521Erik Cristopher Sobarzo LazoNessuna valutazione finora
- MatemáticoDocumento59 pagineMatemáticoHobber DannesNessuna valutazione finora
- 4 Detalles y Detallado Del Acero de Refuerzo Del Concreto ACI-315-1Documento126 pagine4 Detalles y Detallado Del Acero de Refuerzo Del Concreto ACI-315-1Wilber Mac Alvi100% (1)
- Instructivo para Llenar Las Fichas de Análisis Jurisprudencial.pDocumento7 pagineInstructivo para Llenar Las Fichas de Análisis Jurisprudencial.pAle CharryNessuna valutazione finora
- Uptjaa Manual Psit 2015Documento86 pagineUptjaa Manual Psit 2015Carlena AstudilloNessuna valutazione finora
- Capitulo 8Documento2 pagineCapitulo 8Ser2k2100% (1)
- Metodología para Un Manifiesto Poético-PolíticoDocumento7 pagineMetodología para Un Manifiesto Poético-PolíticoseosoriopNessuna valutazione finora
- Apertura Máxima MandibularDocumento8 pagineApertura Máxima MandibularAndres Diaz TrujilloNessuna valutazione finora
- Kit Kda01 A2021Documento4 pagineKit Kda01 A2021medina.jesus.instaltecnicNessuna valutazione finora
- Elementos Del PaisajeDocumento23 pagineElementos Del PaisajeConstanza Torres MuñozNessuna valutazione finora
- Ensayo Sobre Los Factores de Riesgo y Sus Características EspecialesDocumento2 pagineEnsayo Sobre Los Factores de Riesgo y Sus Características EspecialesOrlando Valderrama Tafur89% (9)
- Victor Ortega Tarea 8Documento5 pagineVictor Ortega Tarea 8Victor Ortega Cabezas100% (7)
- Proyecto de Instalaciones Electricas Interiores de Un IndustriaDocumento9 pagineProyecto de Instalaciones Electricas Interiores de Un IndustriaJose Luis BelitoNessuna valutazione finora
- Formato 1. Medición de Cargas de Trabajo Por Dependencia (Ejemplo para Un Proceso)Documento2 pagineFormato 1. Medición de Cargas de Trabajo Por Dependencia (Ejemplo para Un Proceso)Gestor SST IbagueNessuna valutazione finora
- Caso Empresarial ORGANIZACIÓN RAMO - Anibal MartinezDocumento7 pagineCaso Empresarial ORGANIZACIÓN RAMO - Anibal MartinezAnibal Jose Martinez RomeroNessuna valutazione finora
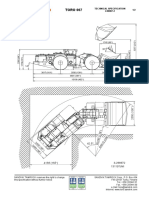
- Ficha Tecnica Toro 007Documento2 pagineFicha Tecnica Toro 007Jose CarmonaNessuna valutazione finora