Potrebbero piacerti anche
- P1 SolucaoDocumento16 pagineP1 Solucaopedro Henrique AssumpçãoNessuna valutazione finora
- Controlador por realimentação de estado de modo para planta (bs+c)(ds+eDocumento11 pagineControlador por realimentação de estado de modo para planta (bs+c)(ds+ePauloNessuna valutazione finora
- 12 - Regulador-Controle Por Realimentação Dos EstadosDocumento16 pagine12 - Regulador-Controle Por Realimentação Dos EstadosRichard de BemNessuna valutazione finora
- Sistemas de massas-mola determinando equações de movimentoDocumento24 pagineSistemas de massas-mola determinando equações de movimentoFabio Barros100% (1)
- Projeto de Sistemas de Controle - Espaço de Estados Malha FechadaDocumento22 pagineProjeto de Sistemas de Controle - Espaço de Estados Malha FechadaDorival OliveiraNessuna valutazione finora
- Ajuste de Curvas Metodo Minimos QuadradosDocumento22 pagineAjuste de Curvas Metodo Minimos QuadradosFabio SouzaNessuna valutazione finora
- Análise de sistemas não-lineares via aproximações linearesDocumento29 pagineAnálise de sistemas não-lineares via aproximações linearesElaineAmaralNessuna valutazione finora
- Filtro de Kalman - IniciantesDocumento63 pagineFiltro de Kalman - IniciantesMaría MarmagoNessuna valutazione finora
- Análise cinemática de motor rotativo com cilindroides elípticosDocumento18 pagineAnálise cinemática de motor rotativo com cilindroides elípticoslukedayz100% (1)
- Solução de Fluxo de Carga Não-Linear (Algoritmo Básico - Método de Newton)Documento17 pagineSolução de Fluxo de Carga Não-Linear (Algoritmo Básico - Método de Newton)João Francisco0% (1)
- Exemplos resolvidos no MATLAB de sistemas mecânicosDocumento31 pagineExemplos resolvidos no MATLAB de sistemas mecânicosVitor NazárioNessuna valutazione finora
- Lista de Exercícios Aulas 4 e 5 6Documento4 pagineLista de Exercícios Aulas 4 e 5 6Luis Henrique FiorotiNessuna valutazione finora
- Sistemas de Tempo Discreto via Equações de RecorrênciaDocumento3 pagineSistemas de Tempo Discreto via Equações de RecorrênciaseveropucNessuna valutazione finora
- Método de JacobiDocumento7 pagineMétodo de JacobiRenan SiesNessuna valutazione finora
- Lista 1Documento3 pagineLista 1luis volpeNessuna valutazione finora
- Função de Transferência do Modelo de Insulina GlargineDocumento12 pagineFunção de Transferência do Modelo de Insulina GlargineCarlos LimaNessuna valutazione finora
- Modelagem Quarter-Car SuspensãoDocumento6 pagineModelagem Quarter-Car SuspensãoluizclaudioventuraNessuna valutazione finora
- Artigo Espaço de Estado e Pendulo InvertidoDocumento4 pagineArtigo Espaço de Estado e Pendulo InvertidocarlosNessuna valutazione finora
- Integração Numérica, Sistemas Lineares e CircuitosDocumento2 pagineIntegração Numérica, Sistemas Lineares e CircuitosDark_RNessuna valutazione finora
- Lab 3 SCMDocumento15 pagineLab 3 SCMCaetano PellegrinNessuna valutazione finora
- Lab 4 SCMDocumento11 pagineLab 4 SCMCaetano PellegrinNessuna valutazione finora
- Lista 2Documento12 pagineLista 2DokScyNessuna valutazione finora
- 5.a Aula - Sist. Lineares - Funcao de TransferenciaDocumento49 pagine5.a Aula - Sist. Lineares - Funcao de TransferenciaMarcelo DantasNessuna valutazione finora
- Resolução Atividade 3 - RosemeireDocumento11 pagineResolução Atividade 3 - RosemeireRose NascimentoNessuna valutazione finora
- Gabriel Fonseca e Jéssica Feitosa - Trabalho 01Documento9 pagineGabriel Fonseca e Jéssica Feitosa - Trabalho 01Jéssica FeitosaNessuna valutazione finora
- Trabalho 3Documento21 pagineTrabalho 3Alexandre LamborghiniNessuna valutazione finora
- Cap3 LaplaceDocumento32 pagineCap3 LaplaceGabriel MazzoniNessuna valutazione finora
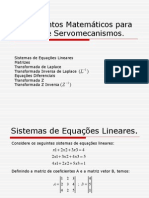
- Fundamentos Matematicos para Controle e ServomecanismosDocumento22 pagineFundamentos Matematicos para Controle e ServomecanismosJuan_Kennedy_A_1533Nessuna valutazione finora
- Análise de Sistemas no Espaço de EstadosDocumento38 pagineAnálise de Sistemas no Espaço de EstadosSamuel GamonalNessuna valutazione finora
- Funções de Transferência em Sistemas de ControleDocumento38 pagineFunções de Transferência em Sistemas de ControleLuis AraujoNessuna valutazione finora
- Laboratório 1 - Análise e Controle de Sistemas MecânicosDocumento18 pagineLaboratório 1 - Análise e Controle de Sistemas Mecânicosjmaj jmajNessuna valutazione finora
- LucasAraujoMaycolBalestreiro PDFDocumento9 pagineLucasAraujoMaycolBalestreiro PDFLucas Araujo de AlmeidaNessuna valutazione finora
- Análise Sistemas Dinâmicos LinearesDocumento28 pagineAnálise Sistemas Dinâmicos LinearesChristian HashimotoNessuna valutazione finora
- Lista 43 ControleDocumento8 pagineLista 43 ControleMatheus AganeteNessuna valutazione finora
- Lista de exercícios de controle de sistemas dinâmicosDocumento2 pagineLista de exercícios de controle de sistemas dinâmicosEvander SarraffNessuna valutazione finora
- Sistemas Discretos: Modelagem, Convolução e FiltrosDocumento5 pagineSistemas Discretos: Modelagem, Convolução e FiltrosBanda Se Vê ArteNessuna valutazione finora
- Modelagem de Sistemas Meca NicosDocumento23 pagineModelagem de Sistemas Meca NicosDavid de Almeida FiorilloNessuna valutazione finora
- SCILAB - Software livre para cálculo numéricoDocumento74 pagineSCILAB - Software livre para cálculo numéricoadriasiq3068Nessuna valutazione finora
- Análise de fluxo de potência linear e não linear em sistema IEEE 14 barrasDocumento6 pagineAnálise de fluxo de potência linear e não linear em sistema IEEE 14 barrasAnaNessuna valutazione finora
- Lab Pds Matlab 2Documento3 pagineLab Pds Matlab 2Augusto CardosoNessuna valutazione finora
- Modelos Matem - Ticos de Sistemas de ControleDocumento36 pagineModelos Matem - Ticos de Sistemas de ControleSamuel GamonalNessuna valutazione finora
- Modelagem matemática de sistemas de controleDocumento28 pagineModelagem matemática de sistemas de controleHenrique LimaNessuna valutazione finora
- Controle de Sistemas Não LinearesDocumento41 pagineControle de Sistemas Não LinearescesardaltoeNessuna valutazione finora
- 1 - Laboratório Sistemas Lineares - EstabilidadeDocumento9 pagine1 - Laboratório Sistemas Lineares - Estabilidadejmaj jmajNessuna valutazione finora
- Relatorio Lista 06Documento6 pagineRelatorio Lista 06PeterNessuna valutazione finora
- Aula 13 - Sistemas Com 2 GDL (Novo) In+¡cio Ao FimDocumento42 pagineAula 13 - Sistemas Com 2 GDL (Novo) In+¡cio Ao FimShueidy BragaNessuna valutazione finora
- Relatório Da Atividad Laboratório 1 - Rafael Matos de SouzaDocumento6 pagineRelatório Da Atividad Laboratório 1 - Rafael Matos de Souzarafael matosNessuna valutazione finora
- LQR aplicado a sistema de controle PI-2DOFDocumento6 pagineLQR aplicado a sistema de controle PI-2DOFClaudio Albués AlvesNessuna valutazione finora
- Tópico 11. Aula Teórica - Prática - O Método Dos Mínimos Quadrados e Linearização de FunçõesDocumento14 pagineTópico 11. Aula Teórica - Prática - O Método Dos Mínimos Quadrados e Linearização de FunçõesMarco GandolfiNessuna valutazione finora
- Factorización LU para resolver sistemas de ecuaciones linealesDocumento3 pagineFactorización LU para resolver sistemas de ecuaciones linealesCristian Uchasara CasavilcaNessuna valutazione finora
- Trabalho Meio CarroDocumento10 pagineTrabalho Meio CarrorildotaffarelNessuna valutazione finora
- Exercícios de interpolação polinomial e método dos mínimos quadradosDocumento11 pagineExercícios de interpolação polinomial e método dos mínimos quadradosasdasdNessuna valutazione finora
- Análise de sistemas não-lineares via aproximações lineares e mapas de PoincaréDocumento32 pagineAnálise de sistemas não-lineares via aproximações lineares e mapas de PoincaréJania QuadrosNessuna valutazione finora
- Interpolação polinomial usando formas de Lagrange e NewtonDocumento16 pagineInterpolação polinomial usando formas de Lagrange e Newtoncarloareis1864Nessuna valutazione finora
- Lista1 (1)Documento7 pagineLista1 (1)Tiago Rodrigues MendonçaNessuna valutazione finora
- Link 1 Junta 3Documento1 paginaLink 1 Junta 3LuizNessuna valutazione finora
- Link 1Documento1 paginaLink 1LuizNessuna valutazione finora
- 6th Central Pay Commission Salary CalculatorDocumento15 pagine6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Modelo do motor DCDocumento2 pagineModelo do motor DCTiago FariaNessuna valutazione finora
- Link 1Documento1 paginaLink 1LuizNessuna valutazione finora
- Maquina de Estado - Comando CASEDocumento2 pagineMaquina de Estado - Comando CASELuizNessuna valutazione finora
- Projeto prático de sistema embarcado da UnicampDocumento12 pagineProjeto prático de sistema embarcado da UnicampLuizNessuna valutazione finora
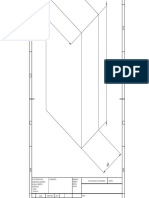
- Peças de engenharia com dimensões e especificaçõesDocumento1 paginaPeças de engenharia com dimensões e especificaçõesCláudia ZanettiNessuna valutazione finora
- Projeto prático de sistema embarcado da UnicampDocumento12 pagineProjeto prático de sistema embarcado da UnicampLuizNessuna valutazione finora
- DesertificaçãoDocumento10 pagineDesertificaçãoLuizNessuna valutazione finora
- Tabelas de Dados Climáticos - BrasilDocumento6 pagineTabelas de Dados Climáticos - BrasilJoaquim PaulinoNessuna valutazione finora
- Automacao Autoa20Documento4 pagineAutomacao Autoa20Profissional SENAINessuna valutazione finora
- Retificador monofásico meia onda análiseDocumento26 pagineRetificador monofásico meia onda análiseAlexandreSilvaNessuna valutazione finora
- SeriesDocumento1 paginaSeriesLuizNessuna valutazione finora
- Metodos de DiscretizacaoDocumento6 pagineMetodos de DiscretizacaoWeslley LiraNessuna valutazione finora
- Diagramas de Bode - 20Documento6 pagineDiagramas de Bode - 20Rodrigo FilhoNessuna valutazione finora
- ES663 Aula11 PDFDocumento46 pagineES663 Aula11 PDFLuizNessuna valutazione finora
- 5 CompensadoresDocumento7 pagine5 CompensadoresCaio CézarNessuna valutazione finora
- ES663 Aula05 PDFDocumento100 pagineES663 Aula05 PDFLuizNessuna valutazione finora
- INTERRUPÇÃO POR TIMERDocumento16 pagineINTERRUPÇÃO POR TIMERLuizNessuna valutazione finora
- Motor CC AtualDocumento33 pagineMotor CC AtualLeandro GomesNessuna valutazione finora
- Isolantes, Semicondutores e CondutoresDocumento6 pagineIsolantes, Semicondutores e CondutoresLuizNessuna valutazione finora
- Circuito Equivalente InduçãoDocumento24 pagineCircuito Equivalente InduçãocristilanoNessuna valutazione finora
- Maquina de Estado - Comando CASEDocumento2 pagineMaquina de Estado - Comando CASELuizNessuna valutazione finora
- Robotica IndustrialDocumento20 pagineRobotica IndustrialLuiz100% (1)
- 29 - 1 - Observabilidade e ControlabilidadeDocumento67 pagine29 - 1 - Observabilidade e ControlabilidadeCleonor C Das NevesNessuna valutazione finora
- Método padrão para circuitos elétricos e sistemas mecânicosDocumento4 pagineMétodo padrão para circuitos elétricos e sistemas mecânicosLuizNessuna valutazione finora
- Resumo - 2 ProvaDocumento3 pagineResumo - 2 ProvavanessacavalcantiiNessuna valutazione finora
- Refrigeração e climatização: processos e aplicaçõesDocumento146 pagineRefrigeração e climatização: processos e aplicaçõesDaniel UlhoaNessuna valutazione finora
- MastersafGF Manual InstalacaoDocumento53 pagineMastersafGF Manual InstalacaotyuhzinhoNessuna valutazione finora
- Carga, Força, Campo, Potencial e Trabalho ElétricoDocumento14 pagineCarga, Força, Campo, Potencial e Trabalho ElétricoClaudioprofessor1Nessuna valutazione finora
- C++ GUI Programando Com Qt4, Seguda EdiçãoDocumento45 pagineC++ GUI Programando Com Qt4, Seguda EdiçãoPizzaria HabinosNessuna valutazione finora
- RelatórioDocumento3 pagineRelatórioJirlane Conceição SantosNessuna valutazione finora
- Manual PowerMax 45 HyperthermDocumento94 pagineManual PowerMax 45 HyperthermFernandoRocha100% (1)
- Checklist - MotoDocumento1 paginaChecklist - Mototayna0% (1)
- Avaliação de Ciências da Natureza com questões sobre equações, estados da matéria e propriedades químicasDocumento5 pagineAvaliação de Ciências da Natureza com questões sobre equações, estados da matéria e propriedades químicasDaiane de Oliveira FreitasNessuna valutazione finora
- Painel de Média Tensão projetoDocumento14 paginePainel de Média Tensão projetoPaulo VieiraNessuna valutazione finora
- Modelo Shell BauDocumento2 pagineModelo Shell BauilumideiasNessuna valutazione finora
- Proporcionalidade direta em situações do 6o anoDocumento4 pagineProporcionalidade direta em situações do 6o anoMarilia Rocha100% (1)
- Catalogo Da Urbe de Andaime Suspenso Eletrico LTD 630Documento11 pagineCatalogo Da Urbe de Andaime Suspenso Eletrico LTD 630FranciscoFaraNessuna valutazione finora
- Fundamentos de Máquinas ElétricasDocumento36 pagineFundamentos de Máquinas Elétricasbpvascohotmail.comNessuna valutazione finora
- Ocorrência de Hidrocarbonetos em MoçambiqueDocumento2 pagineOcorrência de Hidrocarbonetos em MoçambiqueBrunoSamuelAge100% (4)
- Maquinas Massas Percepções e Mentes PG 09-14Documento19 pagineMaquinas Massas Percepções e Mentes PG 09-14luiz antonioNessuna valutazione finora
- Petro LeoDocumento51 paginePetro LeoLetícia FigueiredoNessuna valutazione finora
- CP - Pi 43 - Thunder - BF0035 (505.0094-022) - R04Documento61 pagineCP - Pi 43 - Thunder - BF0035 (505.0094-022) - R04Isaque Elias CorreiaNessuna valutazione finora
- Orçamento elétrico planilhaDocumento6 pagineOrçamento elétrico planilhaRoger ISiNessuna valutazione finora
- Manual DEC-130 PlusDocumento25 pagineManual DEC-130 PlusGilmar Caetano GarciaNessuna valutazione finora
- Atualizar firmware Tablet Android passo a passoDocumento5 pagineAtualizar firmware Tablet Android passo a passoJeferson Acosta DiogoNessuna valutazione finora
- Avaliação de Processos de Software G-NívelDocumento2 pagineAvaliação de Processos de Software G-NívelTiago BonamigoNessuna valutazione finora
- Vidro laminado na construção civilDocumento17 pagineVidro laminado na construção civilRodrigoGregnaniniNessuna valutazione finora
- Enquadramento Comando de VálvulasDocumento4 pagineEnquadramento Comando de VálvulasRafael Canizares ChiarandiNessuna valutazione finora
- Manual de serviço para reparação de transmissão de lavadoraDocumento66 pagineManual de serviço para reparação de transmissão de lavadoramarcojone1326100% (12)
- Sikagard 570 Pele Elástica Fibras v1 07.702Documento4 pagineSikagard 570 Pele Elástica Fibras v1 07.702Miriam FonsecaNessuna valutazione finora
- Proteção de sistemas elétricos de potência - Introdução à filosofia e dispositivos de proteçãoDocumento92 pagineProteção de sistemas elétricos de potência - Introdução à filosofia e dispositivos de proteçãorenatofcortesNessuna valutazione finora
- Fibra OpticaDocumento7 pagineFibra OpticaPatrícia NascimentoNessuna valutazione finora
- Propriedades e aplicações do alumínio e suas ligasDocumento56 paginePropriedades e aplicações do alumínio e suas ligasarthur tavaresNessuna valutazione finora
- Manobras em MTDocumento14 pagineManobras em MTRuiMãodeFerroNessuna valutazione finora
- Meios Não Físicos de Transmissão de DadosDocumento24 pagineMeios Não Físicos de Transmissão de DadosRaimunda Branco100% (1)
- Estratégias E Macetes Matemáticos Para ConcurseirosDa EverandEstratégias E Macetes Matemáticos Para ConcurseirosNessuna valutazione finora
- Raciocínio lógico e matemática para concursos: Manual completoDa EverandRaciocínio lógico e matemática para concursos: Manual completoValutazione: 5 su 5 stelle5/5 (1)
- DNA da Cocriação: Descubra o método revolucionário para dar um salto duplo quântico ao futuro, sintonizando uma nova versão de você. Aumente sua frequência vibracional para cocriar instantaneamente sua realidade e alterar o roteiro do seu destino.Da EverandDNA da Cocriação: Descubra o método revolucionário para dar um salto duplo quântico ao futuro, sintonizando uma nova versão de você. Aumente sua frequência vibracional para cocriar instantaneamente sua realidade e alterar o roteiro do seu destino.Valutazione: 5 su 5 stelle5/5 (1)
- Eletricista De ManutençãoDa EverandEletricista De ManutençãoNessuna valutazione finora
- Algoritmos E Lógica De Programação Com PythonDa EverandAlgoritmos E Lógica De Programação Com PythonNessuna valutazione finora
- Apostila Introdução À Comunicação De Dados E Redes De ComputadoresDa EverandApostila Introdução À Comunicação De Dados E Redes De ComputadoresNessuna valutazione finora
- Indicadores Matemáticos Para Apostas Em FutebolDa EverandIndicadores Matemáticos Para Apostas Em FutebolNessuna valutazione finora