Potrebbero piacerti anche
- Métodos Matriciales para ingenieros con MATLABDa EverandMétodos Matriciales para ingenieros con MATLABValutazione: 5 su 5 stelle5/5 (1)
- Problemario Sistem Ecua PDFDocumento3 pagineProblemario Sistem Ecua PDFItzabely SalgadoNessuna valutazione finora
- Condicionamiento de Una Matriz MTD - NumericoDocumento6 pagineCondicionamiento de Una Matriz MTD - NumericoChristianLudeñaBerrocalNessuna valutazione finora
- Norma 1Documento6 pagineNorma 1Carolina ChicoNessuna valutazione finora
- CapÝtulo 14 Transformada de Laplace y EDPLDocumento10 pagineCapÝtulo 14 Transformada de Laplace y EDPLVismar Campos HernándezNessuna valutazione finora
- Elasticidad de Materiales EjerciciosDocumento11 pagineElasticidad de Materiales EjerciciosadrianNessuna valutazione finora
- Método de Segundo Orden de NewtonDocumento2 pagineMétodo de Segundo Orden de NewtonPedro David Lopez MartinezNessuna valutazione finora
- Examen DinamicaDocumento25 pagineExamen DinamicaHenry A. Marquina LaquiNessuna valutazione finora
- Cuadratura de Gauss-LegendreDocumento32 pagineCuadratura de Gauss-LegendreFEDRA FARCA VILLAVICENCIONessuna valutazione finora
- Ecuaciones Diferenciales Semana 11 - Ejercicios - Altamirano CeinyDocumento14 pagineEcuaciones Diferenciales Semana 11 - Ejercicios - Altamirano CeinyCeiny TapiaNessuna valutazione finora
- Polinomios de LaguerreDocumento3 paginePolinomios de LaguerreHosmmer RojasNessuna valutazione finora
- MMC 2014Documento154 pagineMMC 2014Ing. Andres ZarateNessuna valutazione finora
- GUIA EXAMEN Metodos NumericosDocumento2 pagineGUIA EXAMEN Metodos NumericosMétodos numéricos 2nv51Nessuna valutazione finora
- Punto FijoDocumento12 paginePunto FijomaricelaNessuna valutazione finora
- Guía 4. Unidad IV. Transformada de LaplaceDocumento10 pagineGuía 4. Unidad IV. Transformada de LaplaceAndro Saint-SeiyaNessuna valutazione finora
- An-13 Sistemas Mal CondicionadosDocumento0 pagineAn-13 Sistemas Mal CondicionadosJossimar Junior Bellido ZagaNessuna valutazione finora
- Vibraciones Forzadas ResueltasDocumento4 pagineVibraciones Forzadas ResueltasrenzoNessuna valutazione finora
- Resumen Capitulo 1 Denis ZillDocumento2 pagineResumen Capitulo 1 Denis ZillJosé MaselNessuna valutazione finora
- NormaAlba SENCICO 6a10 TrujilloDocumento14 pagineNormaAlba SENCICO 6a10 TrujilloJORGE LUISNessuna valutazione finora
- A.3 Normas de Vectores y MatricesDocumento8 pagineA.3 Normas de Vectores y MatricesLorenzo Antonio CruzNessuna valutazione finora
- Raices de Una FunciónDocumento1 paginaRaices de Una FunciónmichaelNessuna valutazione finora
- Problemas ResueltosDocumento25 pagineProblemas ResueltosVainillapazNessuna valutazione finora
- Aplicación - Método de RayleighDocumento1 paginaAplicación - Método de RayleighVictor Ccenta Angulo0% (1)
- Ecuación de LegendreDocumento6 pagineEcuación de LegendreMarNessuna valutazione finora
- Método Newton-RaphsonDocumento3 pagineMétodo Newton-RaphsonJhoseph MaNessuna valutazione finora
- Normas de Vectores y Matrices PDFDocumento6 pagineNormas de Vectores y Matrices PDFEdgar Daniel CilNessuna valutazione finora
- Teoría de CampoDocumento30 pagineTeoría de CampoWilber AleluyaNessuna valutazione finora
- PANDEO PILARESDocumento12 paginePANDEO PILARESElPanadero92Nessuna valutazione finora
- Método de Heun - EjercicioDocumento1 paginaMétodo de Heun - EjercicioGonzalo GutierrezNessuna valutazione finora
- Calculo de Las RigidezDocumento7 pagineCalculo de Las RigidezDerly C. Flores LaurenteNessuna valutazione finora
- Estructuras Materia PDFDocumento113 pagineEstructuras Materia PDFvictor35steveNessuna valutazione finora
- Cadena ColganteDocumento10 pagineCadena ColganteFercho HPNessuna valutazione finora
- Cálculo de Una VariableDocumento4 pagineCálculo de Una VariableMaria Flores Aymara100% (2)
- (1.4) Ecuaciones MatricialesDocumento2 pagine(1.4) Ecuaciones MatricialesDiego Villasmil100% (1)
- Problemas de F. Lagrangiana ResueltosDocumento38 pagineProblemas de F. Lagrangiana ResueltosmanuelNessuna valutazione finora
- Ejemplos Período PDFDocumento4 pagineEjemplos Período PDFEdeNessuna valutazione finora
- Trabajo 05Documento14 pagineTrabajo 05KETHNY JUSTINO MALPARTIDA PINONessuna valutazione finora
- Taller 1Documento10 pagineTaller 1manuel escobar100% (1)
- Problema 8 Pag 454Documento3 pagineProblema 8 Pag 454Jose luis Sarayse cruzNessuna valutazione finora
- EDP Segundo OrdenDocumento29 pagineEDP Segundo OrdenAlexander FloresNessuna valutazione finora
- Trabajo 03Documento13 pagineTrabajo 03KETHNY JUSTINO MALPARTIDA PINONessuna valutazione finora
- Ecuaciones Diferenciales Exactas1Documento4 pagineEcuaciones Diferenciales Exactas1Joel ValdesNessuna valutazione finora
- Examen Parcial 2017-I PDFDocumento2 pagineExamen Parcial 2017-I PDFLexNessuna valutazione finora
- Memoria Descriptiva ZuñigaDocumento4 pagineMemoria Descriptiva ZuñigaJJ CamarenaNessuna valutazione finora
- Método de RombergDocumento3 pagineMétodo de RombergMarcelo OrtegaNessuna valutazione finora
- Ejercicos Resuelto de Nagle Capitulo 10.6 Ecuacion de La OndaDocumento21 pagineEjercicos Resuelto de Nagle Capitulo 10.6 Ecuacion de La OndaMisti Furioso100% (1)
- Serie 06 Análisis NuméricoDocumento6 pagineSerie 06 Análisis NuméricoUriel Flores GonzalezNessuna valutazione finora
- Problemas Fundamentales Sobre Equilibrio en Cuerpos Rígidos (Reacciones)Documento6 pagineProblemas Fundamentales Sobre Equilibrio en Cuerpos Rígidos (Reacciones)Angel CruzNessuna valutazione finora
- Ejercicios Resueltos de Mecánica de Fluidos de MootDocumento15 pagineEjercicios Resueltos de Mecánica de Fluidos de MootSamuel EstupiñanNessuna valutazione finora
- Estudio resistencia, corriente y voltaje circuitos mixtosDocumento23 pagineEstudio resistencia, corriente y voltaje circuitos mixtoslaura cristanchoNessuna valutazione finora
- Informe de Proyectiles Fis100 LabDocumento7 pagineInforme de Proyectiles Fis100 LabDavid Sompero MendozaNessuna valutazione finora
- Hojas de Problemas de Metodos Numericos UCMDocumento12 pagineHojas de Problemas de Metodos Numericos UCMSergioNessuna valutazione finora
- Solucion de D'AlembertDocumento3 pagineSolucion de D'AlembertJorge MatusNessuna valutazione finora
- Integrales MiasDocumento3 pagineIntegrales MiasMauro MANessuna valutazione finora
- Campo Con Lamina en XYDocumento2 pagineCampo Con Lamina en XYHectorNessuna valutazione finora
- Preguntas de RepasoDocumento6 paginePreguntas de Repasojosenoibercubasdiaz111Nessuna valutazione finora
- Cadenas de Markov y Su Aplicación en La Ciencia ActuarialDocumento6 pagineCadenas de Markov y Su Aplicación en La Ciencia ActuarialdiegoNessuna valutazione finora
- Taller Semana 13Documento12 pagineTaller Semana 13NFXNessuna valutazione finora
- Cuaderno Digital PDFDocumento6 pagineCuaderno Digital PDFKaty MargothNessuna valutazione finora
- FODADocumento16 pagineFODAimerNessuna valutazione finora
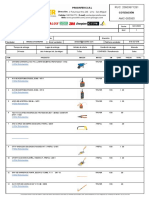
- Cotización de herramientas y equipos de construcciónDocumento3 pagineCotización de herramientas y equipos de construcciónimerNessuna valutazione finora
- 1.00 Ejercicio de Compensación Por Tiempo de ServicioDocumento2 pagine1.00 Ejercicio de Compensación Por Tiempo de ServicioimerNessuna valutazione finora
- 2 Alumnos-Practica Reg. Caja y BancosDocumento1 pagina2 Alumnos-Practica Reg. Caja y BancosimerNessuna valutazione finora
- Pedir 2Documento3 paginePedir 2imerNessuna valutazione finora
- Lectura de MiraDocumento2 pagineLectura de MiraimerNessuna valutazione finora
- Costos - TrabajoDocumento16 pagineCostos - TrabajoimerNessuna valutazione finora
- Cotización BtecinoDocumento2 pagineCotización BtecinoimerNessuna valutazione finora
- CLASE 2 Topografía para IrrigacionesDocumento5 pagineCLASE 2 Topografía para IrrigacionesimerNessuna valutazione finora
- Análisis de precios unitarios mejoramiento vial JaénDocumento41 pagineAnálisis de precios unitarios mejoramiento vial JaénimerNessuna valutazione finora
- Factores de riesgo en proyecto de saludDocumento3 pagineFactores de riesgo en proyecto de saludimerNessuna valutazione finora
- Carta madre solicita VISA salud EEUU hija enfermedad raraDocumento11 pagineCarta madre solicita VISA salud EEUU hija enfermedad raraimerNessuna valutazione finora
- Topografia para Obras de SaneamientoDocumento11 pagineTopografia para Obras de Saneamientokevin67% (6)
- Tecnicas de DibujoDocumento2 pagineTecnicas de DibujoimerNessuna valutazione finora
- La Ciencia-Construccion Civil Ii. Ind. IiDocumento3 pagineLa Ciencia-Construccion Civil Ii. Ind. IikevinNessuna valutazione finora
- Examen I Unidad Cultura ArtisticaDocumento2 pagineExamen I Unidad Cultura ArtisticaimerNessuna valutazione finora
- CorrijoDocumento1 paginaCorrijoimerNessuna valutazione finora
- Practica #1Documento6 paginePractica #1imerNessuna valutazione finora
- PartesDocumento1 paginaPartesimerNessuna valutazione finora
- AspecosDocumento3 pagineAspecosAngieRojanoMoraNessuna valutazione finora
- AspecosDocumento3 pagineAspecosAngieRojanoMoraNessuna valutazione finora
- CorrijoDocumento1 paginaCorrijoimerNessuna valutazione finora
- ViñetasDocumento2 pagineViñetasimerNessuna valutazione finora
- AspecosDocumento3 pagineAspecosAngieRojanoMoraNessuna valutazione finora
- FORMATOSDocumento1 paginaFORMATOSange2064@hotmail.comNessuna valutazione finora
- Ejpractico 01 WordDocumento1 paginaEjpractico 01 WordimerNessuna valutazione finora
- Ej Practico 02 WordDocumento1 paginaEj Practico 02 WordCarlos Graniel Córdova0% (2)
- Examen de Cultura Fisica Unidad IiiDocumento5 pagineExamen de Cultura Fisica Unidad IiiimerNessuna valutazione finora
- Analisis EstructuralDocumento7 pagineAnalisis EstructuralimerNessuna valutazione finora
- Examen de Cultura Fisica Unidad IiiDocumento5 pagineExamen de Cultura Fisica Unidad IiiimerNessuna valutazione finora
- Algebra de matrices: Ejercicios de suma, multiplicación escalar, producto y potenciaDocumento7 pagineAlgebra de matrices: Ejercicios de suma, multiplicación escalar, producto y potenciadanielsuko64Nessuna valutazione finora
- Algoritmo Del Ciclo HidrologicoDocumento4 pagineAlgoritmo Del Ciclo HidrologicoWilfredo Soto LeonNessuna valutazione finora
- TRABAJO DE MATEMÁTICAS SOLUCIONES LINEALES MATRICIALES POR GAUSS y JORDANDocumento14 pagineTRABAJO DE MATEMÁTICAS SOLUCIONES LINEALES MATRICIALES POR GAUSS y JORDANLaura VanesaNessuna valutazione finora
- Habilidades analíticas y gráficas en Ciencias de la ComputaciónDocumento4 pagineHabilidades analíticas y gráficas en Ciencias de la ComputaciónManuel GarcíaNessuna valutazione finora
- Capitulo - Iii (Sistemas Ecuaciones)Documento51 pagineCapitulo - Iii (Sistemas Ecuaciones)LourdesNessuna valutazione finora
- Libro Espacios VectorialesDocumento107 pagineLibro Espacios VectorialesAdriana Chira100% (1)
- Ecuaciones de parábolas, elipses e hipérbolasDocumento90 pagineEcuaciones de parábolas, elipses e hipérbolasFernando SánchezNessuna valutazione finora
- WinratsDocumento278 pagineWinratsJuan Diego FilippiNessuna valutazione finora
- Lógica para informaticaDocumento5 pagineLógica para informaticaFabricio MoraNessuna valutazione finora
- ICN-005 Programa Álgebra LinealDocumento5 pagineICN-005 Programa Álgebra Linealcesar_aros_provosteNessuna valutazione finora
- Aplicaciones Método Lu y DoolittleDocumento8 pagineAplicaciones Método Lu y DoolittleMoyka BlackwellNessuna valutazione finora
- MatricesDocumento12 pagineMatricesDumas DumasNessuna valutazione finora
- Ejercicio 5: Gorianz Ferrufino Pablo Horacio Ingeniería ElectromecánicaDocumento5 pagineEjercicio 5: Gorianz Ferrufino Pablo Horacio Ingeniería ElectromecánicaGorianz Ferrufino Pablo HoracioNessuna valutazione finora
- MatricesDocumento10 pagineMatriceschusk3Nessuna valutazione finora
- Ejemplo de Cálculo - DeformacionesDocumento1 paginaEjemplo de Cálculo - DeformacionesJorge CanoNessuna valutazione finora
- Aplicación de Flujo de Carga Directo A Redes de Gran TamañoDocumento229 pagineAplicación de Flujo de Carga Directo A Redes de Gran TamañoAnonymous B4cO8rM7Nessuna valutazione finora
- 2-2012-APCNº9-Algebra Lineal-ICOM-UDPDocumento10 pagine2-2012-APCNº9-Algebra Lineal-ICOM-UDPmenriquecNessuna valutazione finora
- Activity Guide and Evaluation Rubric - Task 4 - Decisions Under Uncertainty, Risk and Markovian Processes (1) .En - EsDocumento13 pagineActivity Guide and Evaluation Rubric - Task 4 - Decisions Under Uncertainty, Risk and Markovian Processes (1) .En - EsLuis Mario CarvajalNessuna valutazione finora
- UT5 Colecciones de Tamaño Fijo Arrays Librería de ClasesDocumento40 pagineUT5 Colecciones de Tamaño Fijo Arrays Librería de ClasesMónitv980% (1)
- Red de ActividadesDocumento31 pagineRed de ActividadesErick Chumbiauca CastillaNessuna valutazione finora
- S06 S1-MaterialDocumento18 pagineS06 S1-Materialjeyko snickNessuna valutazione finora
- Capitulos 11 12 13Documento16 pagineCapitulos 11 12 13RONALDO LI�AN RUFINONessuna valutazione finora
- SilaboDocumento3 pagineSilaboJamil Segovia ojedaNessuna valutazione finora
- TC3 Apuntes 1Documento23 pagineTC3 Apuntes 1galerick226Nessuna valutazione finora
- Algebra Lineal PDFDocumento37 pagineAlgebra Lineal PDFFidelHuamanAlarconNessuna valutazione finora
- Informe Matriz de Leds OriginalDocumento38 pagineInforme Matriz de Leds OriginalGerardo Cortez BNessuna valutazione finora
- Manual Editor EcuacionesDocumento16 pagineManual Editor EcuacionesEloy CastilloNessuna valutazione finora
- De Lec 1Documento42 pagineDe Lec 1Olha SharhorodskaNessuna valutazione finora
- Unidad I - Algebra Lineal PDFDocumento58 pagineUnidad I - Algebra Lineal PDFHugo SanchezNessuna valutazione finora