Potrebbero piacerti anche
- 2012 - Plataforma de Aquisição e Registro de Energia Elétrica Aplicada A Redes Elétricas Inteligentes (Smart Grids) PDFDocumento6 pagine2012 - Plataforma de Aquisição e Registro de Energia Elétrica Aplicada A Redes Elétricas Inteligentes (Smart Grids) PDFademargcjuniorNessuna valutazione finora
- Expectativas Do Aluno Ingressante Nos Cursos de Engenharia Mecânica e Mecatrônica Da PUCRS - Cobenge2004Documento8 pagineExpectativas Do Aluno Ingressante Nos Cursos de Engenharia Mecânica e Mecatrônica Da PUCRS - Cobenge2004ademargcjuniorNessuna valutazione finora
- A Contribuição Da Disciplina de Introdução À Engenharia Química No Diagnóstico Da EvasãoDocumento17 pagineA Contribuição Da Disciplina de Introdução À Engenharia Química No Diagnóstico Da EvasãoademargcjuniorNessuna valutazione finora
- Desenvolvimento de Atividades de Projeto Nas Disciplinas de "Iniciação À Engenharia"Documento10 pagineDesenvolvimento de Atividades de Projeto Nas Disciplinas de "Iniciação À Engenharia"ademargcjuniorNessuna valutazione finora
- A Visita Técnica Como Recurso Metodológico Aplicado Ao Curso de Engenharia - Cobenge2005Documento7 pagineA Visita Técnica Como Recurso Metodológico Aplicado Ao Curso de Engenharia - Cobenge2005ademargcjuniorNessuna valutazione finora
- Estudo Sobre A Evolução Dos Cursos de EngenhariaDocumento6 pagineEstudo Sobre A Evolução Dos Cursos de EngenhariaademargcjuniorNessuna valutazione finora
- 2008 - Instalações Elétricas Estudo de Caso Centro MédicoDocumento7 pagine2008 - Instalações Elétricas Estudo de Caso Centro MédicoademargcjuniorNessuna valutazione finora
- 2017 - Técnicas de Controle Não-Linear Aplicadas em Processo de Reação BioquímicaDocumento7 pagine2017 - Técnicas de Controle Não-Linear Aplicadas em Processo de Reação BioquímicaademargcjuniorNessuna valutazione finora
- Ricardo S. Santos Prh34 Ufsc Das GDocumento104 pagineRicardo S. Santos Prh34 Ufsc Das GBreno SoteroNessuna valutazione finora
- 2008 - Determinação de Periodicidade de Calibração de Instrumentos de MediçãoDocumento4 pagine2008 - Determinação de Periodicidade de Calibração de Instrumentos de MediçãoademargcjuniorNessuna valutazione finora
- Area Calibracao Ferramenta Inducao Estudo Funcionalidade Analise Propriedades PetrofisicasDocumento106 pagineArea Calibracao Ferramenta Inducao Estudo Funcionalidade Analise Propriedades PetrofisicasademargcjuniorNessuna valutazione finora
- 2006 - Cabeamento de Alta Velocidade em Centros de SaúdeDocumento8 pagine2006 - Cabeamento de Alta Velocidade em Centros de SaúdeademargcjuniorNessuna valutazione finora
- Area Calibracao Ferramenta Inducao Estudo Funcionalidade Analise Propriedades PetrofisicasDocumento106 pagineArea Calibracao Ferramenta Inducao Estudo Funcionalidade Analise Propriedades PetrofisicasademargcjuniorNessuna valutazione finora
- 2008 - Problemas de Rastreabilidade de Instrumentos de Medição para Ensaios de Equipamentos EletromédicosDocumento9 pagine2008 - Problemas de Rastreabilidade de Instrumentos de Medição para Ensaios de Equipamentos EletromédicosademargcjuniorNessuna valutazione finora
- Síntese de Sinais de Variabilidade Da Freqüência Cardíaca Baseada em Modelagem Não-LinearDocumento12 pagineSíntese de Sinais de Variabilidade Da Freqüência Cardíaca Baseada em Modelagem Não-LinearademargcjuniorNessuna valutazione finora
- Ultra Som (Artigo 3)Documento5 pagineUltra Som (Artigo 3)leticiaferreira_15_Nessuna valutazione finora
- 2008 - Condições de Uso e Manutenção Dos Equipamentos de Ultrassom TerapêuticoDocumento4 pagine2008 - Condições de Uso e Manutenção Dos Equipamentos de Ultrassom TerapêuticoademargcjuniorNessuna valutazione finora
- 2007 - Negative Pressure Device For Intra-Abdominal Pressure ReductionDocumento8 pagine2007 - Negative Pressure Device For Intra-Abdominal Pressure ReductionademargcjuniorNessuna valutazione finora
- 2007 - Predicción Del Patrón Respiratorio en Sujetos Sanos Mediante Control Óptimo y Un Clasificador EstadísticoDocumento4 pagine2007 - Predicción Del Patrón Respiratorio en Sujetos Sanos Mediante Control Óptimo y Un Clasificador EstadísticoademargcjuniorNessuna valutazione finora
- 2007 - Using OpenEHR in SICTI An Electronic Health Record System For Critical MedicineDocumento4 pagine2007 - Using OpenEHR in SICTI An Electronic Health Record System For Critical MedicineademargcjuniorNessuna valutazione finora
- Introdução À Engenharia BiomédicaDocumento12 pagineIntrodução À Engenharia BiomédicatecnomecatronicaNessuna valutazione finora
- Introdução À Engenharia BiomédicaDocumento12 pagineIntrodução À Engenharia BiomédicatecnomecatronicaNessuna valutazione finora
- 2006 - Avaliação Das Frequências Produzidas Por Um Protótipo de Um Dispositivo para Higiene Brônquica de Baixo CustoDocumento4 pagine2006 - Avaliação Das Frequências Produzidas Por Um Protótipo de Um Dispositivo para Higiene Brônquica de Baixo CustoademargcjuniorNessuna valutazione finora
- 2007 - Estudio de La Complejidad de La Variabilidad Del Ritmo Cardiaco en Pacientes Con Cardiomiopatia DilatadaDocumento11 pagine2007 - Estudio de La Complejidad de La Variabilidad Del Ritmo Cardiaco en Pacientes Con Cardiomiopatia DilatadaademargcjuniorNessuna valutazione finora
- 2006 - Gestão Da Manutenção HospitalarDocumento29 pagine2006 - Gestão Da Manutenção HospitalarademargcjuniorNessuna valutazione finora
- Gestao Da Manutencao HospitalarDocumento5 pagineGestao Da Manutencao HospitalarEduardo DewisNessuna valutazione finora
- Gestao Da Manutencao HospitalarDocumento5 pagineGestao Da Manutencao HospitalarEduardo DewisNessuna valutazione finora
- 2005 - Synthesis of Stabilizing PID Controllers For Biomechanical ModelsDocumento4 pagine2005 - Synthesis of Stabilizing PID Controllers For Biomechanical ModelsademargcjuniorNessuna valutazione finora
- 2006 - Análise Do Desempenho de Infusões MúltiplasDocumento4 pagine2006 - Análise Do Desempenho de Infusões MúltiplasademargcjuniorNessuna valutazione finora
- Leitura 2-CiclosDocumento35 pagineLeitura 2-CiclosTópicos em Engenharia por Tarcio ManfrimNessuna valutazione finora
- Folhas Práticas RM II 2013-2014 v07Documento35 pagineFolhas Práticas RM II 2013-2014 v07Izel Issufo100% (1)
- Física I - AS-1 Com GabaritoDocumento5 pagineFísica I - AS-1 Com GabaritoADRIEL FADDUL STELZENBERGER SABERNessuna valutazione finora
- Check-Lists GeralDocumento40 pagineCheck-Lists GeralandfergomNessuna valutazione finora
- Exerci Cio SDocumento47 pagineExerci Cio SCarla CarvalhoNessuna valutazione finora
- C-831C Manual IHM Português Aersen de Op. AS200Documento32 pagineC-831C Manual IHM Português Aersen de Op. AS200wagner machado de moraes100% (2)
- Aula 04 - EN 2024Documento146 pagineAula 04 - EN 2024Matheus RangelNessuna valutazione finora
- Guia para Inspeção de Sistemas de Ar CondicionadoDocumento8 pagineGuia para Inspeção de Sistemas de Ar CondicionadoWilliam SantosNessuna valutazione finora
- DIMENSIONAMENTO E VERIFICAÇÃO A SOLICITAÇÕES TANGENCIAIS - TorçãoDocumento13 pagineDIMENSIONAMENTO E VERIFICAÇÃO A SOLICITAÇÕES TANGENCIAIS - TorçãoDavid Calheiros de MendoncaNessuna valutazione finora
- REMOVEDOR COLOMBO - ManualDocumento20 pagineREMOVEDOR COLOMBO - ManualgusticoncariNessuna valutazione finora
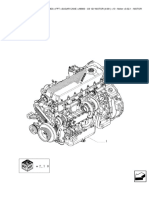
- Catalogo de Peças Iveco C9Documento117 pagineCatalogo de Peças Iveco C9Carlos MacarioNessuna valutazione finora
- Split Hi Wall Samsung AR09MSSPBGMNAZ AR12MSSPBGMNAZ AR18MSSPBGMNAZ AR09MVSPBGMNAZ AR12MVSPBGMNAZ AR24MVSPBGMNAZDocumento2 pagineSplit Hi Wall Samsung AR09MSSPBGMNAZ AR12MSSPBGMNAZ AR18MSSPBGMNAZ AR09MVSPBGMNAZ AR12MVSPBGMNAZ AR24MVSPBGMNAZLuiz Ricardo Prado100% (1)
- Avaliação Ultrassom 1WOBBENDocumento7 pagineAvaliação Ultrassom 1WOBBENLucas PimentelNessuna valutazione finora
- Projeto de Máquinas - Aula 00 - Programa de AulasDocumento3 pagineProjeto de Máquinas - Aula 00 - Programa de AulasAtilla DantasNessuna valutazione finora
- Atividade 4 - Termodinâmica - 53-2023Documento3 pagineAtividade 4 - Termodinâmica - 53-2023Cavalini Assessoria AcadêmicaNessuna valutazione finora
- Gas Catalogo RESULDocumento108 pagineGas Catalogo RESULAntonio VazNessuna valutazione finora
- Rocadeira SRM3605 SRM4605Documento17 pagineRocadeira SRM3605 SRM4605Maurício Silva100% (1)
- Desmontagem Do Motor VHCE Da Chevrolet - Revista O MecânicoDocumento1 paginaDesmontagem Do Motor VHCE Da Chevrolet - Revista O MecânicoJUNIONessuna valutazione finora
- Fundamentos de Automação-Rev-03 PDFDocumento82 pagineFundamentos de Automação-Rev-03 PDFLuiz Otávio Pacheco100% (1)
- CTL 006 1015 Catalogo Unidades Condensadoras Black Unit PTDocumento26 pagineCTL 006 1015 Catalogo Unidades Condensadoras Black Unit PTСергей КолесниковNessuna valutazione finora
- Reta Singer2591DDocumento37 pagineReta Singer2591DMaria MüllerNessuna valutazione finora
- Vazão - Dispositivos de Medição de VazãoDocumento25 pagineVazão - Dispositivos de Medição de VazãoWander AndradeNessuna valutazione finora
- Relatorio de Vibrações...Documento28 pagineRelatorio de Vibrações...Emerson ValerianoNessuna valutazione finora
- Injeção EletrônicaDocumento2 pagineInjeção EletrônicaEliame Sodre100% (1)
- Fluids and Lubricating Greases - Reference GuideDocumento16 pagineFluids and Lubricating Greases - Reference GuideDarlan PitterNessuna valutazione finora
- Apostila - Termodinâmica - Unicamp - Cap 2Documento19 pagineApostila - Termodinâmica - Unicamp - Cap 2Daniel HenriqueNessuna valutazione finora
- C TEC Autentic YGFCDocumento17 pagineC TEC Autentic YGFCdanrcNessuna valutazione finora
- Ventilador Otam 01Documento24 pagineVentilador Otam 01fabiosouza2010Nessuna valutazione finora
- Pos Vendas Dafra Motos Programa Manutencao KansasDocumento1 paginaPos Vendas Dafra Motos Programa Manutencao KansasAxeiheys JuniorNessuna valutazione finora
- Manual Motocultivador de Solo 90hp Com Rodas Enxada Tdt110 ToyamaDocumento19 pagineManual Motocultivador de Solo 90hp Com Rodas Enxada Tdt110 ToyamaEduardo SanhuezaNessuna valutazione finora