Potrebbero piacerti anche
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Mohanty VLSI4 LTSPICEDocumento16 pagineMohanty VLSI4 LTSPICEHarish TellaNessuna valutazione finora
- Polarization Charges in High Performance Gan/Ingan/Gan Core/Shell/Shell Nanowire For Solar Energy HarvestingDocumento3 paginePolarization Charges in High Performance Gan/Ingan/Gan Core/Shell/Shell Nanowire For Solar Energy HarvestingAnonymous jxm0WNS7QaNessuna valutazione finora
- Crystal Structure Control of Au-Free Inas and Inas/Gasb Heterostucture Nanowires Grown On Si (111) by Metal-Organic Chemical Vapor DepositionDocumento5 pagineCrystal Structure Control of Au-Free Inas and Inas/Gasb Heterostucture Nanowires Grown On Si (111) by Metal-Organic Chemical Vapor DepositionAnonymous jxm0WNS7QaNessuna valutazione finora
- Modeling of 2DEG Characteristics of InxAl1-xNAlNGa PDFDocumento12 pagineModeling of 2DEG Characteristics of InxAl1-xNAlNGa PDFAnonymous jxm0WNS7QaNessuna valutazione finora
- ) Unless CC License in Place (See Abstract) - Address. Redistribution Subject To ECS Terms of Use (See Downloaded On 2018-05-07 To IPDocumento5 pagine) Unless CC License in Place (See Abstract) - Address. Redistribution Subject To ECS Terms of Use (See Downloaded On 2018-05-07 To IPAnonymous jxm0WNS7QaNessuna valutazione finora
- Study On Off-State Breakdown in Algan/Gan Hemts: Takeshi Nakao, Yutaka Ohno, Shigeru Kishimoto, Koichi MaezawaDocumento4 pagineStudy On Off-State Breakdown in Algan/Gan Hemts: Takeshi Nakao, Yutaka Ohno, Shigeru Kishimoto, Koichi MaezawaAnonymous jxm0WNS7QaNessuna valutazione finora
- Session 1Documento52 pagineSession 1Anonymous jxm0WNS7QaNessuna valutazione finora
- Mosfets Ic Basics Gate Problems Part II 001Documento22 pagineMosfets Ic Basics Gate Problems Part II 001ayush guptaNessuna valutazione finora
- Lecture 12Documento35 pagineLecture 12Anonymous jxm0WNS7QaNessuna valutazione finora
- Lecture 17Documento15 pagineLecture 17Anonymous jxm0WNS7QaNessuna valutazione finora
- 2019 TCAD IEEE N Polar GaN HEMTDocumento6 pagine2019 TCAD IEEE N Polar GaN HEMTAnonymous jxm0WNS7QaNessuna valutazione finora
- Notes/lecture No 2Documento13 pagineNotes/lecture No 2Anonymous jxm0WNS7QaNessuna valutazione finora
- Lecture 10Documento11 pagineLecture 1023wingsNessuna valutazione finora
- Lecture 01Documento8 pagineLecture 01Anonymous jxm0WNS7QaNessuna valutazione finora
- Fabrication of An Inaln/Algan/Aln/Gan Heterostructure With A Flat Surface and High Electron MobilityDocumento4 pagineFabrication of An Inaln/Algan/Aln/Gan Heterostructure With A Flat Surface and High Electron MobilityAnonymous jxm0WNS7QaNessuna valutazione finora
- Class 3Documento3 pagineClass 3Anonymous jxm0WNS7QaNessuna valutazione finora
- Hickman 2019Documento4 pagineHickman 2019Anonymous jxm0WNS7QaNessuna valutazione finora
- CMOS InverterDocumento6 pagineCMOS InverterRegina MerlinNessuna valutazione finora
- Embedded MCQDocumento5 pagineEmbedded MCQBhojRajAcharyaNessuna valutazione finora
- Lecture5 BWDocumento24 pagineLecture5 BWAnonymous jxm0WNS7QaNessuna valutazione finora
- Madhu120 JavaDocumento48 pagineMadhu120 JavaAnonymous jxm0WNS7Qa80% (5)
- DSP Interview Questions March-2019: ANSWER: A/D ConverterDocumento13 pagineDSP Interview Questions March-2019: ANSWER: A/D ConverterAnonymous jxm0WNS7QaNessuna valutazione finora
- NT MCQDocumento25 pagineNT MCQShripad Joshi0% (1)
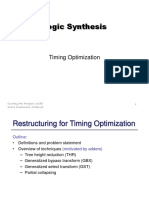
- 017 Timing OptimizationDocumento40 pagine017 Timing OptimizationAnonymous jxm0WNS7QaNessuna valutazione finora
- 017 Timing OptimizationDocumento19 pagine017 Timing OptimizationAnonymous jxm0WNS7QaNessuna valutazione finora
- Fabrication of An Inaln/Algan/Aln/Gan Heterostructure With A Flat Surface and High Electron MobilityDocumento4 pagineFabrication of An Inaln/Algan/Aln/Gan Heterostructure With A Flat Surface and High Electron MobilityAnonymous jxm0WNS7QaNessuna valutazione finora
- Digital System Design: Verilog HDL Basic ConceptsDocumento38 pagineDigital System Design: Verilog HDL Basic Conceptsmahesh24pkNessuna valutazione finora
- home-cet-CET - Site-Event - info-WORKSHOP ON ' DEEP LEARNING ' (Responses) - Form Responses 1 PDFDocumento2 paginehome-cet-CET - Site-Event - info-WORKSHOP ON ' DEEP LEARNING ' (Responses) - Form Responses 1 PDFAnonymous jxm0WNS7QaNessuna valutazione finora
- 017 Timing OptimizationDocumento19 pagine017 Timing OptimizationAnonymous jxm0WNS7QaNessuna valutazione finora
- Reduced Surface Leakage Current and Trapping Effects in Algan/Gan High Electron Mobility Transistors On Silicon With Sin/Al2O3..Documento4 pagineReduced Surface Leakage Current and Trapping Effects in Algan/Gan High Electron Mobility Transistors On Silicon With Sin/Al2O3..Anonymous jxm0WNS7QaNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Handbook+for+Participants+ +GCC+TeenDocumento59 pagineHandbook+for+Participants+ +GCC+Teenchloe.2021164Nessuna valutazione finora
- TOA Project Presentation (GROUP 5)Documento22 pagineTOA Project Presentation (GROUP 5)Khadija ShahidNessuna valutazione finora
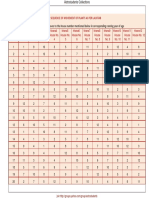
- Lalkitab Varshphal Chart PDFDocumento6 pagineLalkitab Varshphal Chart PDFcalvinklein_22ukNessuna valutazione finora
- Evolution DBQDocumento4 pagineEvolution DBQCharles JordanNessuna valutazione finora
- Assignment 5 WarehousingDocumento4 pagineAssignment 5 WarehousingabbasNessuna valutazione finora
- 240-56062705 RTV Silicone Rubber Insulator Coating and Shed Extender Supplier StandardDocumento10 pagine240-56062705 RTV Silicone Rubber Insulator Coating and Shed Extender Supplier StandardJane ChatsiriphatthanaNessuna valutazione finora
- AnimDessin2 User Guide 01Documento2 pagineAnimDessin2 User Guide 01rendermanuser100% (1)
- Activity 2Documento5 pagineActivity 2DIOSAY, CHELZEYA A.Nessuna valutazione finora
- Electromechani Cal System: Chapter 2: Motor Control ComponentsDocumento35 pagineElectromechani Cal System: Chapter 2: Motor Control ComponentsReynalene PanaliganNessuna valutazione finora
- Teaching Mathematics Content Through Explicit TeachingDocumento39 pagineTeaching Mathematics Content Through Explicit Teachingronna drio100% (1)
- Vectors Notes (Answers)Documento24 pagineVectors Notes (Answers)ScionNessuna valutazione finora
- Design of CouplingDocumento75 pagineDesign of CouplingVatsal BhalaniNessuna valutazione finora
- Dady - Piernas LargasDocumento12 pagineDady - Piernas LargasSarha NietoNessuna valutazione finora
- Soil Liquefaction Analysis of Banasree Residential Area, Dhaka Using NovoliqDocumento7 pagineSoil Liquefaction Analysis of Banasree Residential Area, Dhaka Using NovoliqPicasso DebnathNessuna valutazione finora
- Student Workbook: Advance 3Documento31 pagineStudent Workbook: Advance 3Damaris VegaNessuna valutazione finora
- 1974 - Roncaglia - The Reduction of Complex LabourDocumento12 pagine1974 - Roncaglia - The Reduction of Complex LabourRichardNessuna valutazione finora
- ITP - Plaster WorkDocumento1 paginaITP - Plaster Workmahmoud ghanemNessuna valutazione finora
- DAB Submersible PumpsDocumento24 pagineDAB Submersible PumpsMohamed MamdouhNessuna valutazione finora
- Company Profile PT. Geo Sriwijaya NusantaraDocumento10 pagineCompany Profile PT. Geo Sriwijaya NusantaraHazred Umar FathanNessuna valutazione finora
- Experion Legacy IO Link Module Parameter Reference Dictionary LIOM-300Documento404 pagineExperion Legacy IO Link Module Parameter Reference Dictionary LIOM-300BouazzaNessuna valutazione finora
- Zilog Z80-SIO Technical Manual TextDocumento58 pagineZilog Z80-SIO Technical Manual Textprada.rizzoplcNessuna valutazione finora
- Distillation Column DesignDocumento42 pagineDistillation Column DesignAakanksha Raul100% (1)
- Electric PotentialDocumento26 pagineElectric PotentialGlitchNessuna valutazione finora
- DSynchronize (ENG)Documento3 pagineDSynchronize (ENG)Rekha Rajarajan100% (1)
- Watershed Conservation of Benguet VisDocumento2 pagineWatershed Conservation of Benguet VisInnah Agito-RamosNessuna valutazione finora
- Rules and Fallacies For Categorical SyllogismsDocumento5 pagineRules and Fallacies For Categorical SyllogismsFatima Ismael PortacioNessuna valutazione finora
- Routine (27th April)Documento1 paginaRoutine (27th April)SoumitNessuna valutazione finora
- Mis Report On Ola CabsDocumento18 pagineMis Report On Ola CabsDaksh MaruNessuna valutazione finora
- Analysis of Green Entrepreneurship Practices in IndiaDocumento5 pagineAnalysis of Green Entrepreneurship Practices in IndiaK SrivarunNessuna valutazione finora
- Motive 27Tmx: Data SheetDocumento2 pagineMotive 27Tmx: Data SheetUlisesGómezNessuna valutazione finora