Potrebbero piacerti anche
- Introduction To Linear Algebra 6th Edition and A CR - 05Documento14 pagineIntroduction To Linear Algebra 6th Edition and A CR - 05maviarena44% (9)
- Back-UPS RS 550 Installation & Operation: Inventory SafetyDocumento7 pagineBack-UPS RS 550 Installation & Operation: Inventory SafetyAndrej VukalovicNessuna valutazione finora
- Practical, Made Easy Guide To Robotics & Automation [Revised Edition]Da EverandPractical, Made Easy Guide To Robotics & Automation [Revised Edition]Valutazione: 1 su 5 stelle1/5 (1)
- Fundamental of Robotic ManipulatorDocumento101 pagineFundamental of Robotic ManipulatorswapnakaleNessuna valutazione finora
- AssignmentqDocumento12 pagineAssignmentqDirajen PMNessuna valutazione finora
- IC Project Plan Dashboard With Gantt Chart 11422Documento6 pagineIC Project Plan Dashboard With Gantt Chart 11422Washington FonsecaNessuna valutazione finora
- 1-571 Study Guide - 1000+ QADocumento112 pagine1-571 Study Guide - 1000+ QAMahmoud Hagag100% (3)
- ISO 26262-10-2012-Road Vehicles Functional Safety Guideline On ISO 26262Documento100 pagineISO 26262-10-2012-Road Vehicles Functional Safety Guideline On ISO 26262Cycy Hm100% (1)
- DELMIA Tutorial PDFDocumento13 pagineDELMIA Tutorial PDFEduard Lupus LoboNessuna valutazione finora
- Injection MouldingDocumento33 pagineInjection MouldingArpit S SavarkarNessuna valutazione finora
- NetSuite SuiteTax Setup Guide PDFDocumento75 pagineNetSuite SuiteTax Setup Guide PDFAnurag Singh100% (1)
- Robot Cell DesignDocumento18 pagineRobot Cell DesignShione T Mundawarara57% (7)
- Hdpe Versus FRPDocumento4 pagineHdpe Versus FRPAshok NarayanNessuna valutazione finora
- Robotics & Automation in Construction IndustryDocumento43 pagineRobotics & Automation in Construction IndustryAbuzar Khan100% (8)
- Study Guide: CBCN4103 Introduction To NetworkingDocumento271 pagineStudy Guide: CBCN4103 Introduction To NetworkingHuy HANessuna valutazione finora
- Walking RobotsDocumento17 pagineWalking RobotsJoemon John KurishumootillNessuna valutazione finora
- Wall CleanerDocumento5 pagineWall CleanerNaitik JainNessuna valutazione finora
- Pneumatic Wall Climbing Robot PDFDocumento4 paginePneumatic Wall Climbing Robot PDFRavi tejaNessuna valutazione finora
- CH 1-OverviewDocumento58 pagineCH 1-OverviewMohamed AbdullahiNessuna valutazione finora
- Design Modeling and Control of A Wall CL PDFDocumento6 pagineDesign Modeling and Control of A Wall CL PDFRam KumarNessuna valutazione finora
- Ajst 3 3 134 140Documento7 pagineAjst 3 3 134 140Ebrahim AbdulfattahNessuna valutazione finora
- Energy Comparison of Controllers Used For A Differential Drive Wheeled Mobile RobotDocumento13 pagineEnergy Comparison of Controllers Used For A Differential Drive Wheeled Mobile RobotElias GarcíaNessuna valutazione finora
- Chapter 2Documento19 pagineChapter 2Aung ThikeNessuna valutazione finora
- Developing The Prototype of Wall Climbing RobotDocumento6 pagineDeveloping The Prototype of Wall Climbing RobotMuhammad Anaz'sNessuna valutazione finora
- Vision Based Robot For Boiler Tube InspeDocumento8 pagineVision Based Robot For Boiler Tube Inspetuan694Nessuna valutazione finora
- Robotics Automation in Construction IndustryDocumento43 pagineRobotics Automation in Construction Industryppjadhav920Nessuna valutazione finora
- Development of A Wall-Climbing Robot Using A Tracked Wheel Mechanism - KSMEDocumento9 pagineDevelopment of A Wall-Climbing Robot Using A Tracked Wheel Mechanism - KSMEWahid HusainNessuna valutazione finora
- 25905608-Design and Development of Three Arms Transmission Line Inspection RobotDocumento4 pagine25905608-Design and Development of Three Arms Transmission Line Inspection RobotRashtra BhushanNessuna valutazione finora
- Xiao Gangruan2010Documento9 pagineXiao Gangruan2010dan_intel6735Nessuna valutazione finora
- Investigation of Design & Fabrication of In-Pipe Inspection RobotDocumento4 pagineInvestigation of Design & Fabrication of In-Pipe Inspection RobotMilos BubanjaNessuna valutazione finora
- A Mobile Robot With Autonomous Climbing and DescenDocumento19 pagineA Mobile Robot With Autonomous Climbing and DescenAprida HutagalungNessuna valutazione finora
- Design and Control of A Two-Wheel Self-Balancing Robot Using The Arduino Microcontroller BoardDocumento3 pagineDesign and Control of A Two-Wheel Self-Balancing Robot Using The Arduino Microcontroller BoardAneetaNessuna valutazione finora
- MED50Documento8 pagineMED50Kishor Kumar DasNessuna valutazione finora
- Robot Cleaning With Good ControlDocumento8 pagineRobot Cleaning With Good ControlASTROS SPACENessuna valutazione finora
- Adaptive Control Strategy of Climbing Robot For Inspection Applications in Construction IndustryDocumento6 pagineAdaptive Control Strategy of Climbing Robot For Inspection Applications in Construction IndustryVishal PatilNessuna valutazione finora
- Nain Wall Climbing RobotDocumento11 pagineNain Wall Climbing RobotSharath SuriNessuna valutazione finora
- High-Efficiency Weld Robot: Technical PaperDocumento8 pagineHigh-Efficiency Weld Robot: Technical Paperjose rosasNessuna valutazione finora
- Design of Inspection and Cleaning RobotDocumento6 pagineDesign of Inspection and Cleaning RobotGR Techno SolutionsNessuna valutazione finora
- Balancing Control of A Two Wheeled Mobile Robot SystemDocumento7 pagineBalancing Control of A Two Wheeled Mobile Robot SystemAbdellilah HattabNessuna valutazione finora
- Industrial Robotics Industrial Robot: Pemda40Documento8 pagineIndustrial Robotics Industrial Robot: Pemda40Sivakumar VedachalamNessuna valutazione finora
- Major Synopsis On Hydraulic ArmDocumento7 pagineMajor Synopsis On Hydraulic ArmPrashant Balhara0% (2)
- Dynamic Window ApproachDocumento23 pagineDynamic Window ApproachJulio Enrique FajardoNessuna valutazione finora
- Cai 4th PDFDocumento3 pagineCai 4th PDFJoao CarvalhoNessuna valutazione finora
- Design and Development Kroto FinderDocumento9 pagineDesign and Development Kroto Finderimamul haqueNessuna valutazione finora
- ProjectDocumento25 pagineProjectVenkatakrishnan GovindarajanNessuna valutazione finora
- Project Segway 3 WheelDocumento26 pagineProject Segway 3 WheelMohit ChetwaniNessuna valutazione finora
- RobotDocumento17 pagineRobotpdhananjaya007Nessuna valutazione finora
- Robot Móvil Autónomo Con Desplazamientos en Plano Vertical y Aplicaciones en Servicios de LimpiezaDocumento6 pagineRobot Móvil Autónomo Con Desplazamientos en Plano Vertical y Aplicaciones en Servicios de Limpiezakevin paulNessuna valutazione finora
- U4 02-Chapter 2 Robot Work Cell Design and Control FinalDocumento56 pagineU4 02-Chapter 2 Robot Work Cell Design and Control Finalabhishek100% (3)
- Assingment 1 Mobile RobotDocumento12 pagineAssingment 1 Mobile Robotiqbal105Nessuna valutazione finora
- 213 Myeong Drone-TypeDocumento6 pagine213 Myeong Drone-TypeIrshad AliNessuna valutazione finora
- Robot CellDocumento14 pagineRobot CellAthiraNessuna valutazione finora
- An Intelligent Recoil Controller For Ri - 2022 - International Journal of NavalDocumento11 pagineAn Intelligent Recoil Controller For Ri - 2022 - International Journal of NavalNguyen Phuc LinhNessuna valutazione finora
- ControlsystemsinRobotics Review PDFDocumento11 pagineControlsystemsinRobotics Review PDFTeam RaagNessuna valutazione finora
- PPDF - Estad23 - 206 - Robotic Safety SlideDocumento6 paginePPDF - Estad23 - 206 - Robotic Safety Slidefrittella pNessuna valutazione finora
- Mechatronics Final Year Project ProposalDocumento10 pagineMechatronics Final Year Project ProposalArjun Pratap Singh100% (2)
- completeFinalReport SieDeenLauDocumento28 paginecompleteFinalReport SieDeenLauNagababu RockzzNessuna valutazione finora
- Application of Robotics For The Nuclear Power Plants in KoreaDocumento5 pagineApplication of Robotics For The Nuclear Power Plants in KoreaAbhilasha SaksenaNessuna valutazione finora
- An Approach To Robot Motion Analysis and Planning For Conveyor 'IkackingDocumento7 pagineAn Approach To Robot Motion Analysis and Planning For Conveyor 'IkackingDuy KhổngNessuna valutazione finora
- Mechanical Structural Analysis AND Design Optimization: OF Industrial RobotsDocumento29 pagineMechanical Structural Analysis AND Design Optimization: OF Industrial RobotsAhsan AmjadNessuna valutazione finora
- Robotics and Vision System - TMTE 503 (Unit 1)Documento14 pagineRobotics and Vision System - TMTE 503 (Unit 1)Raunak GuptaNessuna valutazione finora
- 1.1. A Sense of HistoryDocumento8 pagine1.1. A Sense of HistoryCarlitos FerNessuna valutazione finora
- Continuum RobotDocumento42 pagineContinuum Robotxs.a.ma.nt.halop.e.zNessuna valutazione finora
- Design and Manufacturing of Magnetic Climbing RobotDocumento23 pagineDesign and Manufacturing of Magnetic Climbing RobotSushant VanveNessuna valutazione finora
- IESLCoE Robotics-Assignment - 2Documento11 pagineIESLCoE Robotics-Assignment - 2kavish malakaNessuna valutazione finora
- Robot de InspeccionDocumento7 pagineRobot de InspeccionMisael GonzalezNessuna valutazione finora
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaDa EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNessuna valutazione finora
- X y Z Inverse Matrix Control PointsDocumento1 paginaX y Z Inverse Matrix Control PointsArpit S SavarkarNessuna valutazione finora
- MAde Easy Aptitude PDFDocumento343 pagineMAde Easy Aptitude PDFArpit S SavarkarNessuna valutazione finora
- Study of Nozzle: Arpit Savarkar Ashutosh Ballawar Neha Babar Danish Babla Sneha BansudeDocumento28 pagineStudy of Nozzle: Arpit Savarkar Ashutosh Ballawar Neha Babar Danish Babla Sneha BansudeArpit S SavarkarNessuna valutazione finora
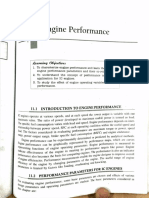
- Engine Performance - S.S.thipseDocumento16 pagineEngine Performance - S.S.thipseArpit S SavarkarNessuna valutazione finora
- MAde Easy AptitudeDocumento343 pagineMAde Easy AptitudeVikas Potluri100% (1)
- Calendar 100% WorksDocumento3 pagineCalendar 100% WorksArpit S SavarkarNessuna valutazione finora
- Delay FunctionDocumento1 paginaDelay FunctionArpit S SavarkarNessuna valutazione finora
- TrialDocumento1 paginaTrialArpit S SavarkarNessuna valutazione finora
- Nice OneDocumento2 pagineNice OneArpit S SavarkarNessuna valutazione finora
- TrialDocumento1 paginaTrialArpit S SavarkarNessuna valutazione finora
- Installation Instructions For RCM Eccentric Adjustable Idler Set Subaru EJ20/22/25Documento4 pagineInstallation Instructions For RCM Eccentric Adjustable Idler Set Subaru EJ20/22/25николай дехтярNessuna valutazione finora
- Internet of Things For Smart ManufacturingDocumento3 pagineInternet of Things For Smart ManufacturingPK KNessuna valutazione finora
- 18-12-07 Rieckermann Indonesia LNG EXTERNAL TMKDocumento34 pagine18-12-07 Rieckermann Indonesia LNG EXTERNAL TMKadiNessuna valutazione finora
- User's Guide: Magnetic Inductive Flow Meter MAG-VIEW™Documento20 pagineUser's Guide: Magnetic Inductive Flow Meter MAG-VIEW™mrdadeNessuna valutazione finora
- Real Life Startup Pitch DeckDocumento55 pagineReal Life Startup Pitch DeckWalter TenecotaNessuna valutazione finora
- Let Us Discover: Quarter: 4 Week: 4 ELC: Perform Testing, Documentation, and Pre DeploymentDocumento3 pagineLet Us Discover: Quarter: 4 Week: 4 ELC: Perform Testing, Documentation, and Pre Deploymentrianeprogod3600Nessuna valutazione finora
- VI.4 LED TV Min 42 - Smart Google TV 43 Inch - Smart TV Terbaik POLYTRONDocumento25 pagineVI.4 LED TV Min 42 - Smart Google TV 43 Inch - Smart TV Terbaik POLYTRONTriaji SiswandiNessuna valutazione finora
- Deutz Fahr Agrolux 55e Test ReportDocumento12 pagineDeutz Fahr Agrolux 55e Test ReportMamta RaybageNessuna valutazione finora
- Masterseal 901: Vinyl Ester Methacrylate Resin For Crack Injection Via Injection Hoses and PackersDocumento2 pagineMasterseal 901: Vinyl Ester Methacrylate Resin For Crack Injection Via Injection Hoses and PackersMadhu RaiNessuna valutazione finora
- Shaqra University-Costing Sajjad V1Documento4 pagineShaqra University-Costing Sajjad V1Moody KhalidNessuna valutazione finora
- Brochure For Structure 2021Documento2 pagineBrochure For Structure 2021Miguel WindsorNessuna valutazione finora
- Integrated Circuit Fabrication ProcessDocumento14 pagineIntegrated Circuit Fabrication ProcessSanthosh DheerajNessuna valutazione finora
- Air Flow in IncubatorDocumento4 pagineAir Flow in IncubatorsambadeeNessuna valutazione finora
- Kepastian Hukum Dalam Hukum Investasi Di Indonesia Melalui Omnibus LawDocumento17 pagineKepastian Hukum Dalam Hukum Investasi Di Indonesia Melalui Omnibus Lawsiti maslikhaNessuna valutazione finora
- Computer Vision Is An Interdisciplinary Scientific Field That Deals With How Computers Can Gain High-LevelDocumento3 pagineComputer Vision Is An Interdisciplinary Scientific Field That Deals With How Computers Can Gain High-LevelPreah GulatiNessuna valutazione finora
- Select and Use ICT ToolsDocumento36 pagineSelect and Use ICT ToolsKathrine Victorino0% (1)
- Fingerprint ManualDocumento11 pagineFingerprint ManualEdgar A CanizalezNessuna valutazione finora
- E 1211 - 97 - RteymtetukveDocumento6 pagineE 1211 - 97 - RteymtetukveLENDNessuna valutazione finora
- Math Practice Sheets: Number Concepts Part IDocumento20 pagineMath Practice Sheets: Number Concepts Part IindyanexpressNessuna valutazione finora
- Module M-07: EquipmentDocumento1 paginaModule M-07: EquipmentRobles DreschNessuna valutazione finora
- Alfian Dwi Nugroho S.T: Geodetic EngineeringDocumento1 paginaAlfian Dwi Nugroho S.T: Geodetic EngineeringAlfian Dwi NugrohoNessuna valutazione finora
- TC55 Android KK BSP v2.68 GMS LifeGuard Update 11 ReleaseNotesDocumento9 pagineTC55 Android KK BSP v2.68 GMS LifeGuard Update 11 ReleaseNotesJose De LeonNessuna valutazione finora



![Practical, Made Easy Guide To Robotics & Automation [Revised Edition]](https://imgv2-2-f.scribdassets.com/img/word_document/253466853/149x198/4281882d40/1709916831?v=1)