Potrebbero piacerti anche
- Coordenadas PolaresDocumento18 pagineCoordenadas PolaresLumaTelesNessuna valutazione finora
- Parte Apostila POLARES ERON-29-40Documento12 pagineParte Apostila POLARES ERON-29-40Paulo BotêsNessuna valutazione finora
- Curvas Planas em Coordenadas Polares: SumárioDocumento23 pagineCurvas Planas em Coordenadas Polares: SumárioMisael Albuquerque LiraNessuna valutazione finora
- GA Apostila de Coordenadas Polares PDFDocumento34 pagineGA Apostila de Coordenadas Polares PDFSteven CannonNessuna valutazione finora
- CALCULO III TEXTO INTEGRAL DUPLA (Em Coordenadas Polares) PDFDocumento12 pagineCALCULO III TEXTO INTEGRAL DUPLA (Em Coordenadas Polares) PDFCaio Felipe CarvalhoNessuna valutazione finora
- Polares 13Documento18 paginePolares 13Eduardo DelfinoNessuna valutazione finora
- Coordenadas PolaresDocumento5 pagineCoordenadas PolareshnpereiraNessuna valutazione finora
- TeoricoDocumento24 pagineTeoricoCowboyNessuna valutazione finora
- 3º Teorico - Coordenadas PolaresDocumento26 pagine3º Teorico - Coordenadas PolaresJoão Junio NascimentoNessuna valutazione finora
- Coordenadas PolaresDocumento8 pagineCoordenadas PolaresLeonardo RamosNessuna valutazione finora
- q6 Coord Polar PDFDocumento18 pagineq6 Coord Polar PDFDoroteia12Nessuna valutazione finora
- GA - Apostila de Coordenadas PolaresDocumento34 pagineGA - Apostila de Coordenadas PolarespecankasNessuna valutazione finora
- Área em Coordenadas PolaresDocumento17 pagineÁrea em Coordenadas PolaresCarlos MagnoNessuna valutazione finora
- 0 AM2 Part1Documento25 pagine0 AM2 Part1RafaelaMateusNessuna valutazione finora
- PolaresDocumento9 paginePolaresjuliaocbvNessuna valutazione finora
- Coordenadas Polares - CônicasDocumento17 pagineCoordenadas Polares - CônicasRil SilvaNessuna valutazione finora
- Coordenadas PolaresDocumento9 pagineCoordenadas PolaresDusty MurphyNessuna valutazione finora
- 349506-Coordenadas PolaresDocumento6 pagine349506-Coordenadas PolaresAlef BehlingNessuna valutazione finora
- Texto 03 Integral Dupla em Coordenadas PolaresDocumento10 pagineTexto 03 Integral Dupla em Coordenadas PolaresbarbararodleiNessuna valutazione finora
- GA A Resumo 11 Coordenadas Polares e CilíndricasDocumento3 pagineGA A Resumo 11 Coordenadas Polares e CilíndricasNilson PimentelNessuna valutazione finora
- Aula 5 - Coordenadas PolaresDocumento24 pagineAula 5 - Coordenadas PolaresThiago SilvaNessuna valutazione finora
- Curso - Coordenadas Polares - Conteúdo (Apostila)Documento7 pagineCurso - Coordenadas Polares - Conteúdo (Apostila)Samantha CarlaNessuna valutazione finora
- Sistema de Coordenadas Polares Com Exercios Resolvidos Calculo ADocumento21 pagineSistema de Coordenadas Polares Com Exercios Resolvidos Calculo AClaudio Pereira50% (2)
- Aula 32 - C Lculo 2Documento10 pagineAula 32 - C Lculo 2Adriano MoschiniNessuna valutazione finora
- Apostila Coordenadas Polares-Alunos PDFDocumento43 pagineApostila Coordenadas Polares-Alunos PDFMatheus Ferri0% (1)
- PantografoDocumento7 paginePantografoJefferson T. Girao100% (1)
- Grupo Isometrias GeometriaEuclidianaDocumento4 pagineGrupo Isometrias GeometriaEuclidianamarlon mathNessuna valutazione finora
- Pontos de Interseção e Distância Entre RetasDocumento4 paginePontos de Interseção e Distância Entre RetasFrancisco JuniorNessuna valutazione finora
- Apostila Coordenadas Polares Cilindricas EsfericasDocumento10 pagineApostila Coordenadas Polares Cilindricas Esfericashfthtj cgjfjxNessuna valutazione finora
- Cálculo Ii - Novo: Ifsul - Câmpus PelotasDocumento38 pagineCálculo Ii - Novo: Ifsul - Câmpus PelotassylviocoelhoNessuna valutazione finora
- Coordenadas PolaresDocumento14 pagineCoordenadas PolaresCor BanNessuna valutazione finora
- Coordenadas Polares PDFDocumento12 pagineCoordenadas Polares PDFLuis AnjosNessuna valutazione finora
- Bianchini Dos Santos Aprendendo Calculo de Uma Variavel Capitulo 2Documento15 pagineBianchini Dos Santos Aprendendo Calculo de Uma Variavel Capitulo 2Mariana MarquesNessuna valutazione finora
- Trigonometria Na CircunferênciaDocumento7 pagineTrigonometria Na Circunferênciasidney_lanesNessuna valutazione finora
- Equações Da Reta No Plano: SumárioDocumento29 pagineEquações Da Reta No Plano: SumárioRaphael Martinez EleuterioNessuna valutazione finora
- Posição Relativa Entre Retas e Círculos e Distâncias: SumárioDocumento17 paginePosição Relativa Entre Retas e Círculos e Distâncias: SumárioMisael Albuquerque LiraNessuna valutazione finora
- Coordenadas PolaresDocumento6 pagineCoordenadas PolaresDanielaNessuna valutazione finora
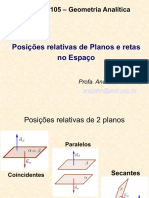
- MAT105 Posicoes Planos Retas VFDocumento22 pagineMAT105 Posicoes Planos Retas VFJamilo Dos SantosNessuna valutazione finora
- Integral Dupla - Coord PolaresDocumento9 pagineIntegral Dupla - Coord PolaresthomazxlimaxNessuna valutazione finora
- Equivalentes 5 PostuladoDocumento10 pagineEquivalentes 5 PostuladoFernando FilhoNessuna valutazione finora
- Areas em Coordenadas PolaresDocumento5 pagineAreas em Coordenadas PolaresTonny AntonyNessuna valutazione finora
- Agrupamento de Escolas de Alc Acer Do Sal Teste de Matem Atica ADocumento3 pagineAgrupamento de Escolas de Alc Acer Do Sal Teste de Matem Atica AAna Rita LopesNessuna valutazione finora
- Apostila GACV Cap10-13Documento65 pagineApostila GACV Cap10-13Gabriel medinaNessuna valutazione finora
- Ponto e RetaDocumento6 paginePonto e Retacezar-rsilvaNessuna valutazione finora
- Cap 10.6Documento5 pagineCap 10.6Igor MillisNessuna valutazione finora
- Resumo Coordenadas PolaresDocumento4 pagineResumo Coordenadas PolaresJoao Raimundo FerreiraNessuna valutazione finora
- 7 - Coordenadas Polares e Curvas ParamétricasDocumento65 pagine7 - Coordenadas Polares e Curvas ParamétricasFernanda AraújoNessuna valutazione finora
- Ficha 5 - Apoio 11Documento2 pagineFicha 5 - Apoio 11Catarina JesusNessuna valutazione finora
- Aula9 CSLDocumento35 pagineAula9 CSLVictor Hugo Garcia de CamposNessuna valutazione finora
- Caminhos Relacoes 2Documento19 pagineCaminhos Relacoes 2deydson.siufpaNessuna valutazione finora
- Ponto Reta Plano 2Documento5 paginePonto Reta Plano 2Nonato LopesNessuna valutazione finora
- Geom. AnalíticaDocumento8 pagineGeom. AnalíticahermenegildokididiNessuna valutazione finora
- Geometria Diferencial II Verderesi IME USP 2013Documento81 pagineGeometria Diferencial II Verderesi IME USP 2013José Antonio Silva NetoNessuna valutazione finora
- 2022 Prova 2Documento7 pagine2022 Prova 2Erica MarquesNessuna valutazione finora
- Sistema de Coordenadas EsféricasDocumento7 pagineSistema de Coordenadas EsféricasJulia PereiraNessuna valutazione finora
- Matemática - Rumoaoita - Artigoconicascap3Documento9 pagineMatemática - Rumoaoita - Artigoconicascap3Geometria Ensino MédioNessuna valutazione finora
- Mata01 2023 2Documento14 pagineMata01 2023 2rafael92527Nessuna valutazione finora
- Hamlet A Aurora Do Anti-HeróiDocumento7 pagineHamlet A Aurora Do Anti-HeróiJorge TostesNessuna valutazione finora
- A Teoria Do Conhecimento em DescartesDocumento10 pagineA Teoria Do Conhecimento em DescartesCelso Wzorek100% (3)
- Aprendendo Metodologia CientificaDocumento22 pagineAprendendo Metodologia CientificaLucas Meurer TavaresNessuna valutazione finora
- Estudos Maçônicos-João AnatalinoDocumento356 pagineEstudos Maçônicos-João Anatalinocaetano_selva100% (7)
- 154 Questões de VetoresDocumento29 pagine154 Questões de VetoresAnonymous Kxq1jSOXNessuna valutazione finora
- O Método CartesianoDocumento1 paginaO Método CartesianoLuciano Silva do Nascimento100% (1)
- Ficha Do Óvulo e OvalDocumento2 pagineFicha Do Óvulo e OvalMaria Emília Rodrigues100% (6)
- AsatrúDocumento41 pagineAsatrúLuiz Gustavo Costa100% (1)
- Curvas Verticais PDFDocumento30 pagineCurvas Verticais PDFMarcia MacedoNessuna valutazione finora
- O Especialista Instantaneo em Filosofia - Hakinson, JimDocumento30 pagineO Especialista Instantaneo em Filosofia - Hakinson, JimZé AntônioNessuna valutazione finora
- Re82129 Ny11 Resolucoes Ga11Documento43 pagineRe82129 Ny11 Resolucoes Ga11itsbeeeaaa100% (2)
- Richard Popkin - Ceticismo ModernoDocumento5 pagineRichard Popkin - Ceticismo ModernojaimircNessuna valutazione finora
- Joseph Ratzinger Introducao Ao CristianismoDocumento692 pagineJoseph Ratzinger Introducao Ao CristianismoJoão Elton de Jesus100% (4)
- Apostila de Geometria Analítica I Parte 01 PDFDocumento5 pagineApostila de Geometria Analítica I Parte 01 PDFRafaelLaurentino100% (1)
- Autoatividade Cap 1Documento4 pagineAutoatividade Cap 1ed wilsonNessuna valutazione finora
- CalculoVetorialeGA PDFDocumento133 pagineCalculoVetorialeGA PDFDaniel CarvalhoNessuna valutazione finora
- Mma10 CA GeoDocumento58 pagineMma10 CA GeoAntónio DurãoNessuna valutazione finora
- Sc1.Resenha Critmodern RevisadoDocumento5 pagineSc1.Resenha Critmodern RevisadoIgo SantosNessuna valutazione finora
- A DEFINIÇÃO DA PSICOLOGIA, Uma Introdução Aos Sistemas Psicológicos - FRED S KELLER, 1970 PDFDocumento161 pagineA DEFINIÇÃO DA PSICOLOGIA, Uma Introdução Aos Sistemas Psicológicos - FRED S KELLER, 1970 PDFa4307281100% (3)
- Artigo Sobre Locke e LeibnizDocumento10 pagineArtigo Sobre Locke e LeibnizMarcos Dy CastelazzyNessuna valutazione finora
- Filosofia - 11ºanoDocumento5 pagineFilosofia - 11ºanosarasilvasousa2007Nessuna valutazione finora
- Superfícies Cilíndricas, Esféricas e Quádricas PDFDocumento10 pagineSuperfícies Cilíndricas, Esféricas e Quádricas PDFRaphael FernandesNessuna valutazione finora
- Resenha Porto Gonçalves A Globalização Da Natureza e A Natureza Da GlobalizaçãoDocumento18 pagineResenha Porto Gonçalves A Globalização Da Natureza e A Natureza Da GlobalizaçãoTaty BorgesNessuna valutazione finora
- Circunferencia PDFDocumento11 pagineCircunferencia PDFPaula SilvestreNessuna valutazione finora
- TD - Enem Prá Valer - 01-07-23 - Epistemologia ModernaDocumento2 pagineTD - Enem Prá Valer - 01-07-23 - Epistemologia ModernaPedro BernardinoNessuna valutazione finora
- FilosofiaDocumento95 pagineFilosofiaKeren NovaisNessuna valutazione finora
- A Educação e o Iluminismo.Documento7 pagineA Educação e o Iluminismo.Lucio ArturNessuna valutazione finora
- Descarte EnsaioDocumento6 pagineDescarte EnsaioAntónio Martins de CarvalhoNessuna valutazione finora
- Bingo Do Plano CartesianoDocumento8 pagineBingo Do Plano CartesianoHugleibson BernardoNessuna valutazione finora
- Matriz Do 4 Teste de Filosofia 11 E ADAPTADODocumento1 paginaMatriz Do 4 Teste de Filosofia 11 E ADAPTADOisabelmouradNessuna valutazione finora